Hi,
it mostly depends on the sensors you want to use. The easiest way is to connect the sensors via USB to ROSbot 2.0 Single Board Computer. Then you can make software on SBC.
What kind of sensors you want to use? Do you have datasheets of them?
As Team Husarion, we will not be able to help you write dedicated code for a given sensor (unless in the form of an additional service). Are there any more ambiguities that need to be clarified so that you have a set of basic information to start work?
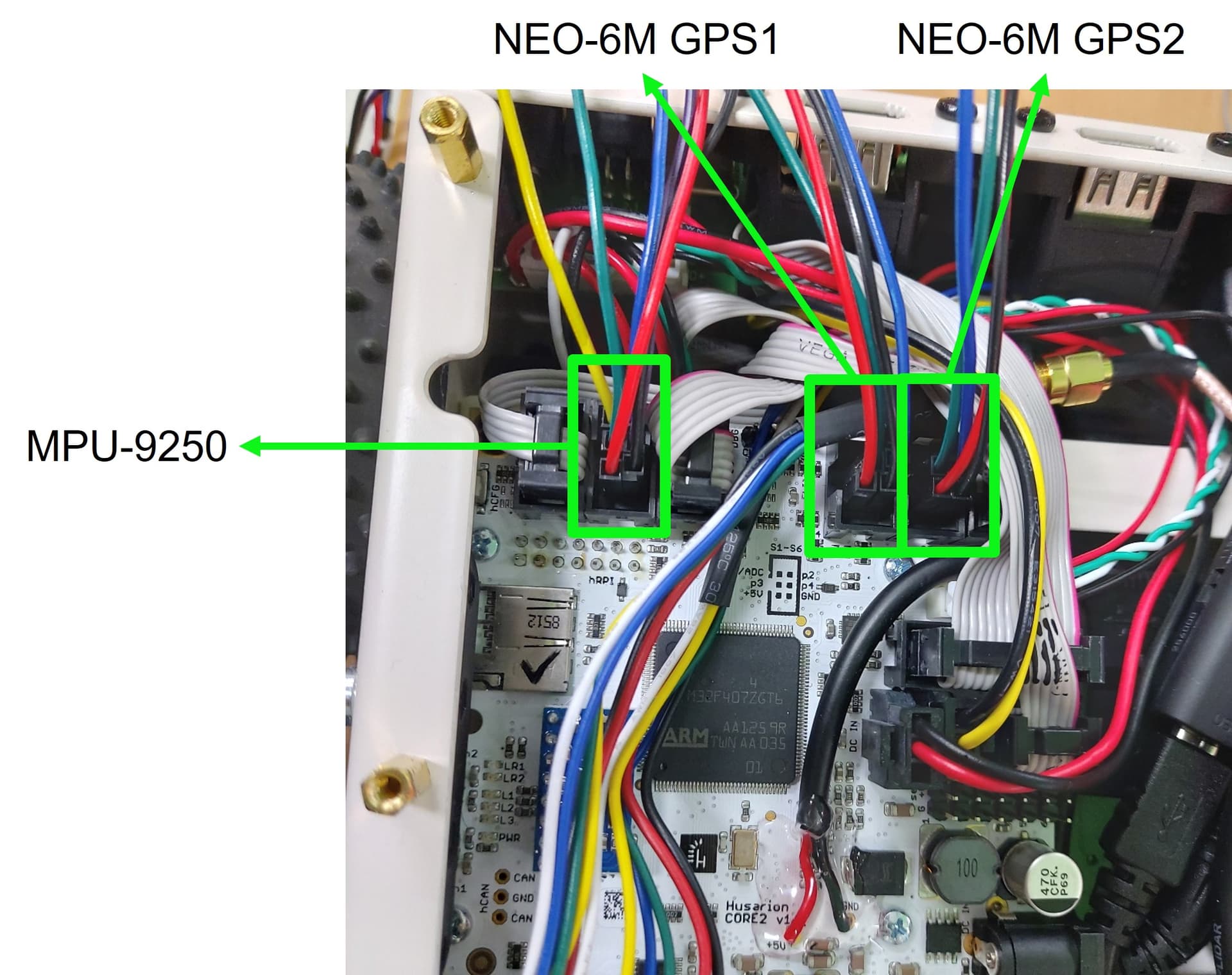
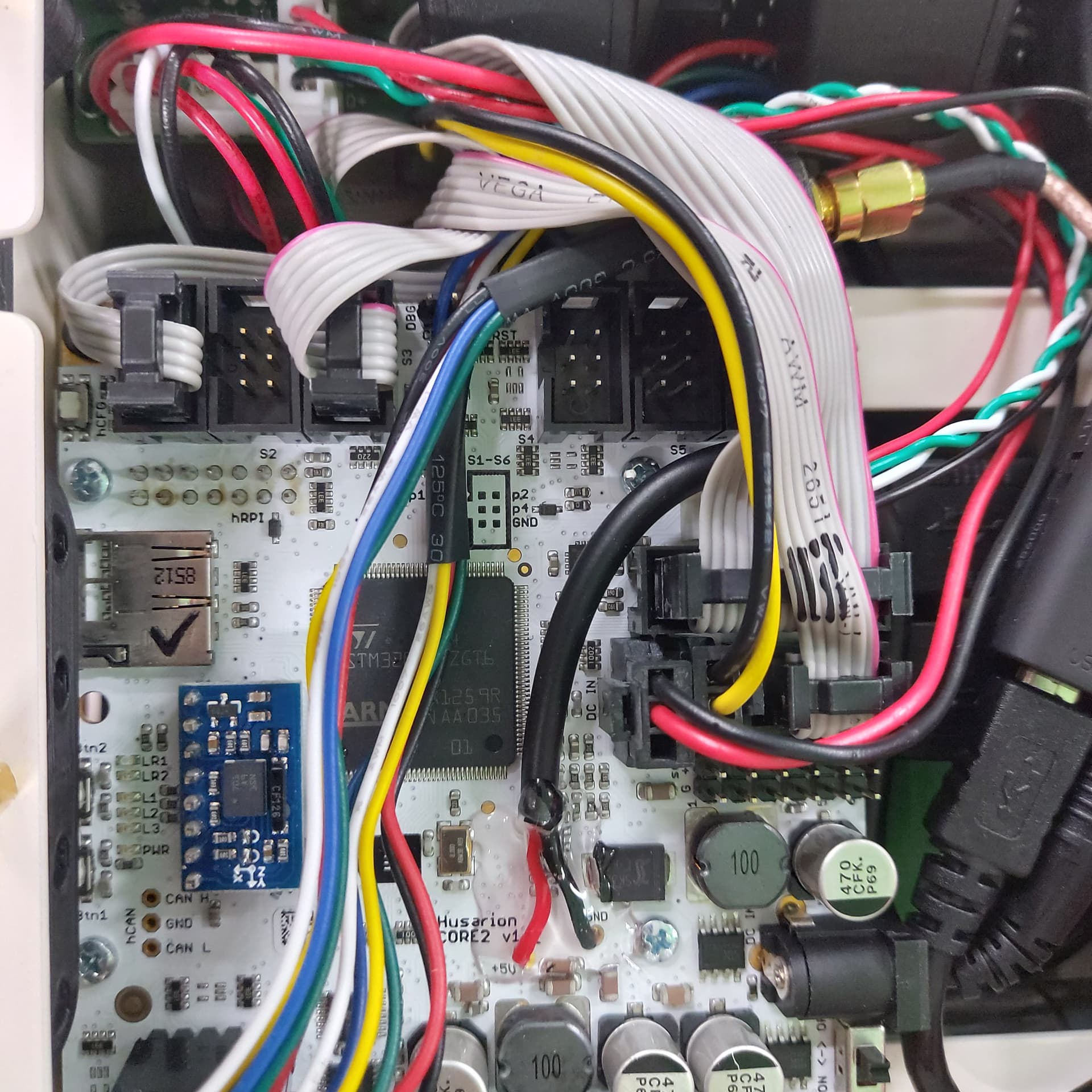
hSens2 connector shares GPIO/I2C pins with IMU (BNO055). In theory, I2C bus allows to add more devices and you could do it, but it needs more work in firmware. And we do not guarantee that IMU will still work good enough after that. Therefore, it is not recommended to use this port, unless you still want to use IMU. Also, the pin 2 of this connector is an output from IMU interrupt signal, so you cannot use this MCU pin as an output too.
There was a phrase Custom robot design in the link, so I asked if I could get the robot software that I wanted if I contacted them there.
But now I’m trying to fix the firmware myself.
Hi.
We created this repository focusing on the “standard” peripherals of ROSbot 2(R) (PRO), which means that some interfaces are not included in the source code.
But you can write your own part of code, knowing which microcontroller pins are connected to the hSens5 and hExt ports. I prepared a cheatsheet for that purpose: