Hi,
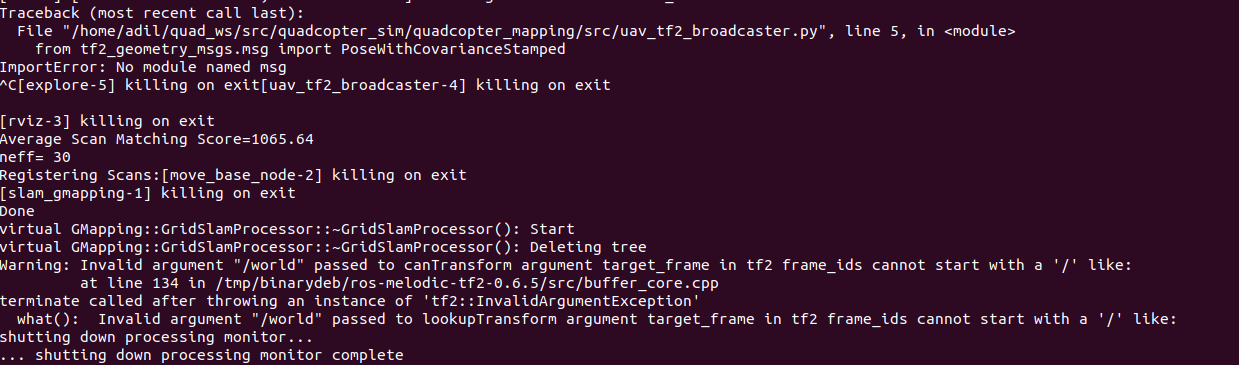
I hope you doing good. I have been able to map and navigate using gmapping and move_base node. However, while executing the exploration launch file with explore_lite package I am getting the following error and can’t place the points in rviz to start the exploration. So the quadcopter doesn’t move when initializing with the 5 points. I am using ROS Melodic distribution in Ubuntu 18.04. Can you tell me if you tested the exploration part in melodic and by any chance you faced this issue? May be its also to do with the tf frame I am unable to find this.
Warning: Invalid argument “/world” passed to canTransform argument target_frame in tf2 frame_ids cannot start with a ‘/’ like:
at line 134 in /tmp/binarydeb/ros-melodic-tf2-0.6.5/src/buffer_core.cpp
Looking forward for your reply soon. Thankyou