Hi, Pkowalsk,
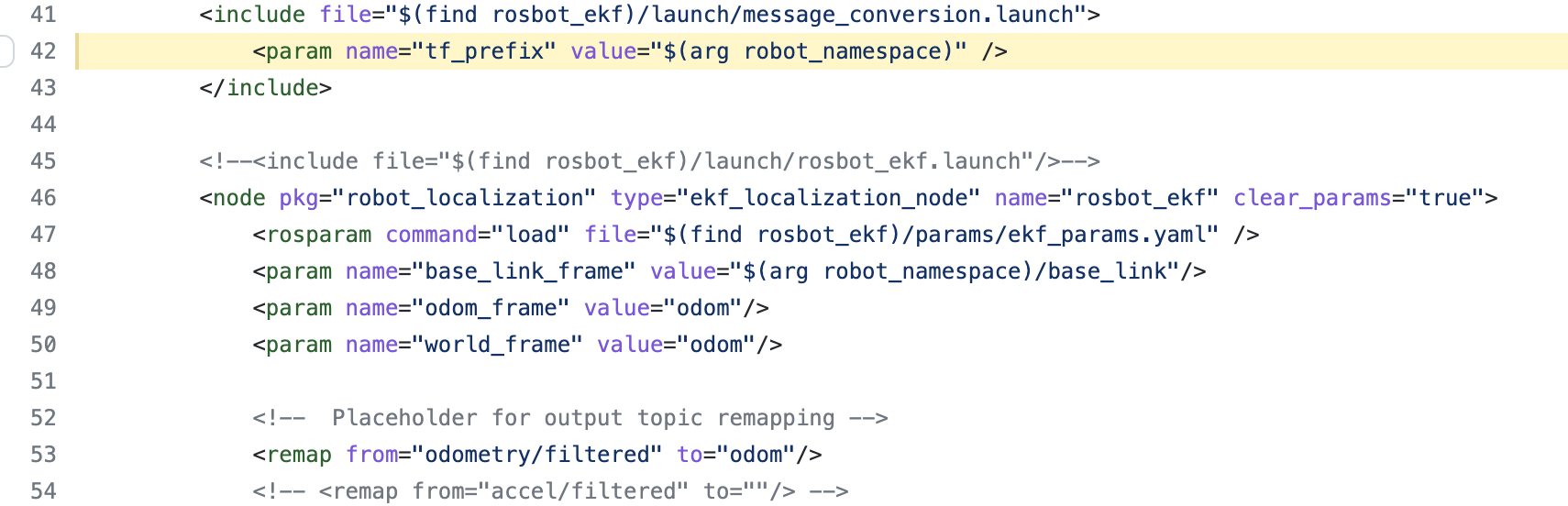
With reference to Odometry/Rosbot_ekf not working under namespace, in my launch script start_namesapce.launch, I added tf_prefix for message_conversion.launch in line 42, and removed absolute paths of odom from robot_localization in 49, 50 and 53. It looks like:
Here are the topic list, msg data of /rosbot1/odom, /rosbot1/imu, and the TF tree after launch launch_rosbot_with_name.launch,
-
topic list
-
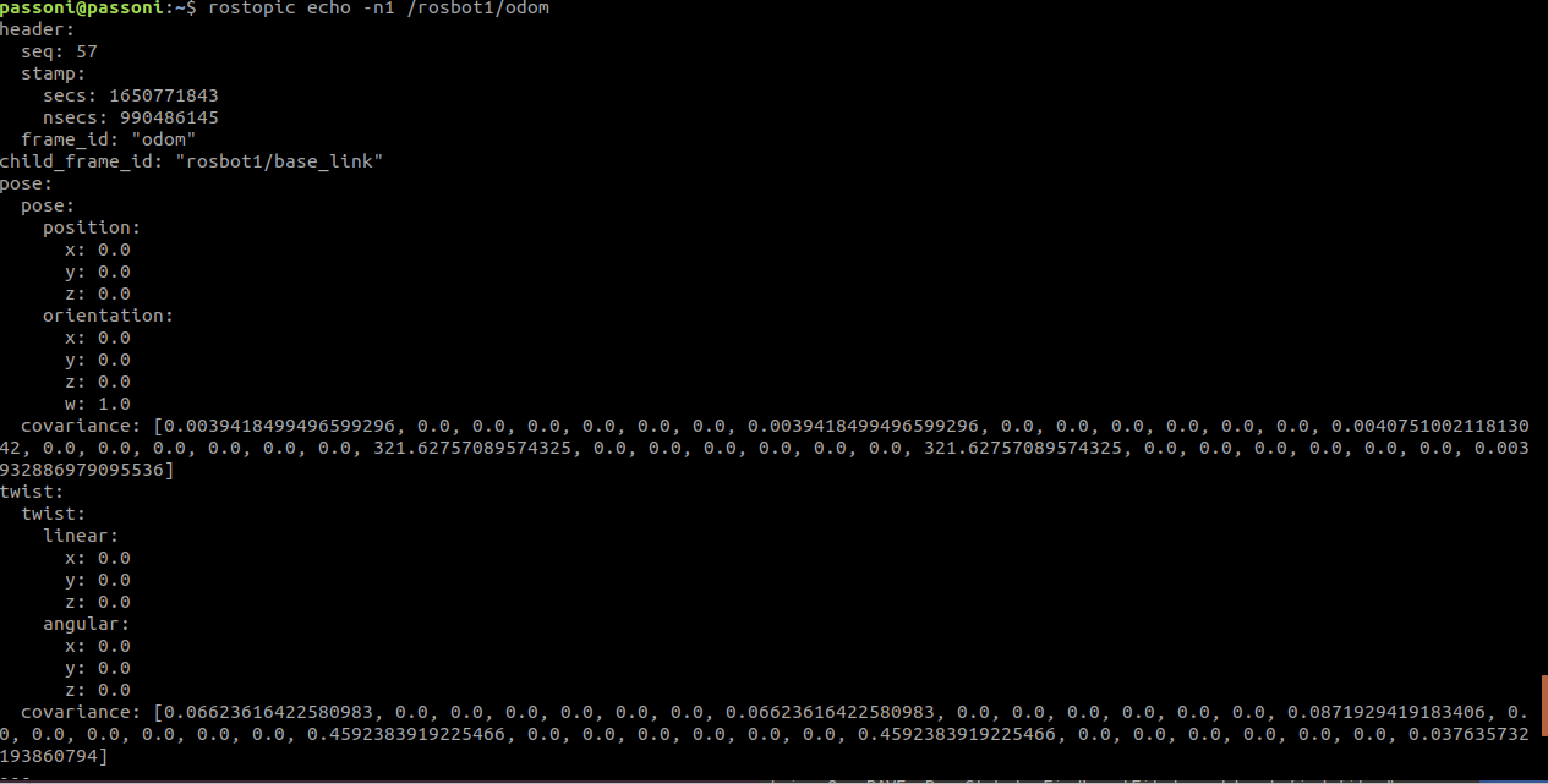
msg of
/rosbot1/odom
-
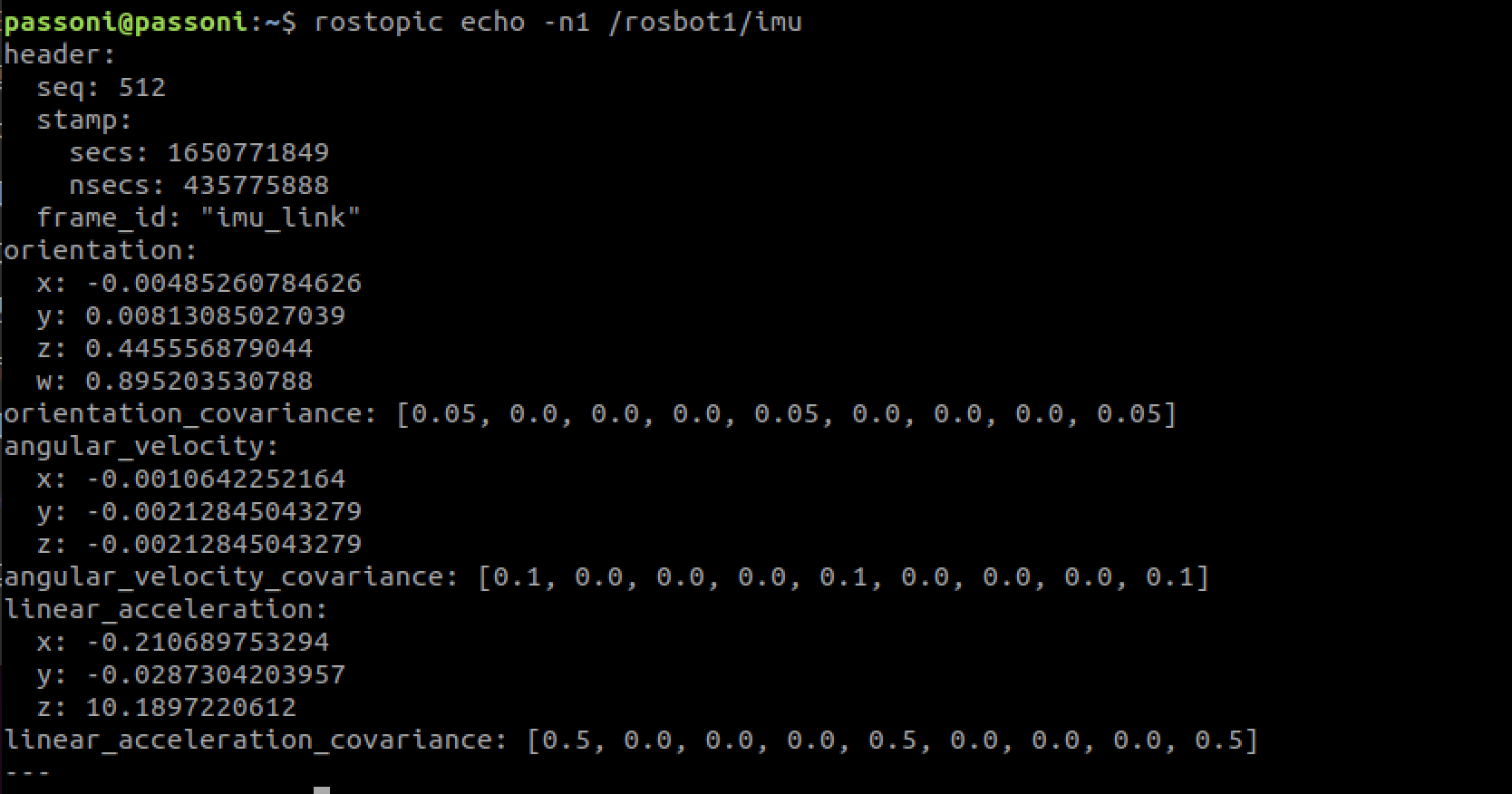
msg of
/rosbot1/imu
-
TF Tree

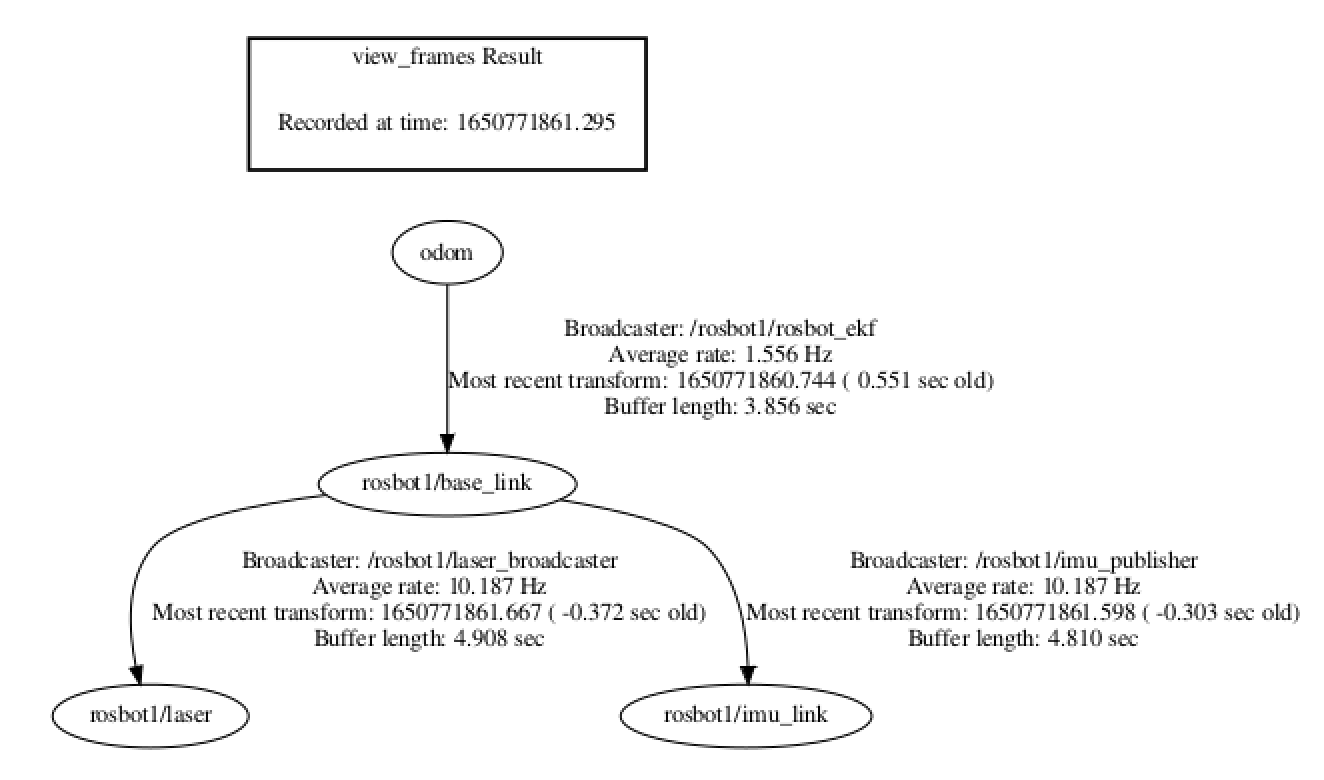
I still got repeated warnings like:
[ WARN] [1650773660.660316260]: Could not obtain transform from imu_link to rosbot1/base_link. Error was "imu_link" passed to lookupTransform argument source_frame does not exist.
[ WARN] [1650773660.964193215]: Failed to meet update rate! Took 0.41670220000000002258
[ WARN] [1650773661.773607929]: Failed to meet update rate! Took 1.1761404740000001024
[ WARN] [1650773661.967833834]: Timed out waiting for transform from rosbot1/base_link to map to become available before running costmap, tf error: canTransform: target_frame map does not exist.. canTransform returned after 0.101034 timeout was 0.1.
In the TF tree, frame id map, and rosbot1/odom still appear correctly! I am wondering if it is right to build the correct TF tree by changing frame id imu_link to rosbot1/imu_link, and changing frame id odom to rosbot1/odom. If it is, could you please guide me hwo to do it?
Thanks in advance!
BRs,
Si