Trying to update firmware on one of our ROSBots (ROSBot2Pro) and not having any success. I wonder if anyone else has had a similar issue?
$ sudo stm32loader -c upboard -u -W
Couldn’t initialise the periphery.GPIO instances. Try use the script with sudo.
Our other ROSBots updated okay. This one is being stubborn. Not sure if it is related but the ROSBot may have had the ROS version 2 installed previously.
Hi Hubert,
Thank you for your reply. I reinstall stm32loader and python-periphery. I still get same fault. I have not yet retry to install OS image.
I have more information for you:
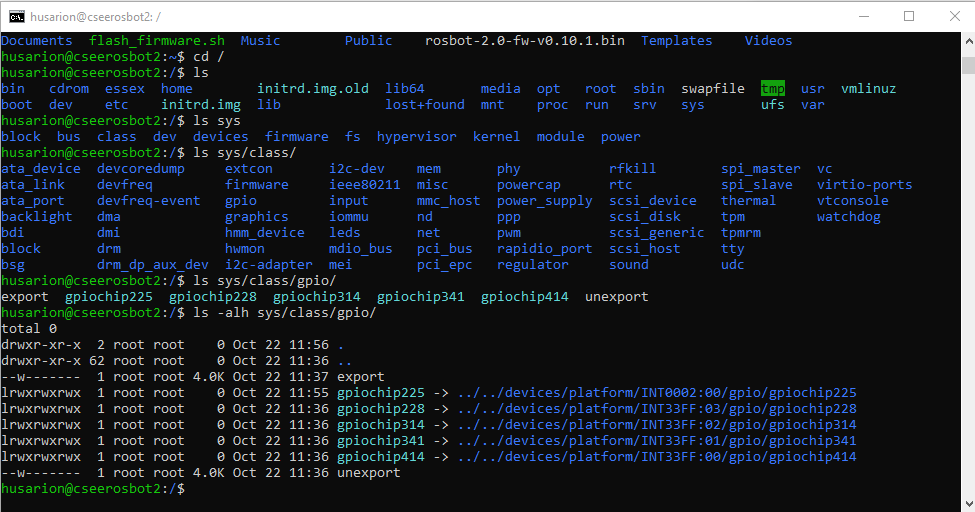
I notice that in: /sys/class/gpio/
it contains symlinks to /sys/devices/platform.
On a ROSBot that can update firmware okay I see that it has symlinks to devices mounted under /sys/devices/platform/up-pinctrl.
But on the ROSBot that fails to update firmware it does not have these mounted devices or the symlinks.
I suspect that these mounted devices are required and is the reason the firmware update fails?
ROSBot that fails to update firmware: (missing symlinks for gpio17, gpio18, and gpiochip0)
I reinstall OS image. The error is still present. When I try:
sudo stm32loader -c upboard -u -W
I get:
Couldn’t initialise the periphery.GPIO instances. Try use the script with sudo.
I think that the best way to investigate your issue will be remote connection to your device by someone from our team. I will contact you in private message to set this up.