Hello!
I am learning ROStutorials and in path planning section, i am in trouble of tunning move_base parameters.
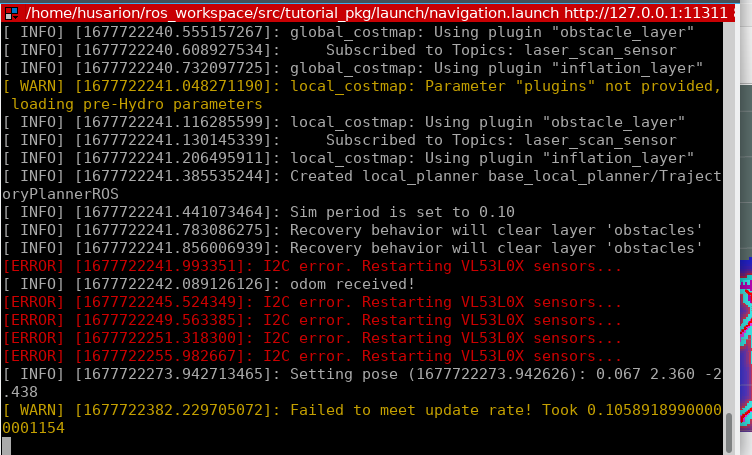
Along trying to achieve perfect planning, I got this error although the rosbot move and go to target goal with bad planning.
Please kindly share how to deal with this error.
Best Regards
goldcold
Hello @goldcold
Your problem is related to ROS Tutorials section.
We are in the process of refreshing and reproducing ROS Tutorials, which due to being based on ROS Melodic and some other issues may be out of date in some places and may throw errors in extreme cases. As soon as the part you’re having trouble with is updated, I’ll get back to you.
Best regards
Jan Brzyk
Hello @goldcold
I am very happy to let you know that the ROS Tutorial 8. Path planning has been updated and now should work properly. Let me know about your results!
If you still have any doubts, you can address them to @RafalGorecki who is the proud author of the latest version of these tutorials!
Best regards
Jan Brzyk
Hello
Thank you very much.
Yes, I am now testing again from OS reinstallation.
By the way, when I watched the video of quick start of rosbot 2r which is uploaded, i want to know the condition status of LEDs Core2: L1,2,3,LR1,2.
Please kindly let me know is there any sources to learn.
Best Regards
gcold
For new questions, I suggest starting a new thread. I consider the case with Path Planning to be closed.