The same problem with nav2 package is also there when I run amcl package.
Hello @Yadun_Murali,
I apologize for the lack of response and thank you very much for the information and I am glad that you managed to solve this problem. I keep it in mind all the time and I will think about how to improve it in the future.
If you have any further questions, I will try to answer them.
Regards
I only managed to solve the robot control using teleop. I still can’t get navigation working. I still need your help in that.
Did you change all occurrence of scan_filtered navigation.yaml. Scan filter appear 3 times. Also check if you have correctly save map from SLAM tutorial if you do not override or specify map argument the code will automatically load default map from from gazebo which is large and can make some crashes.
If nothing works use a ready-made solution for rosbot.
Similar error happened to me. On top of that, I also have the another problem which might be related to fixed frame. I set the fixed frame to “map” and If I run the teleop, the robot is not moving in the rviz2 after few times robot was moving.
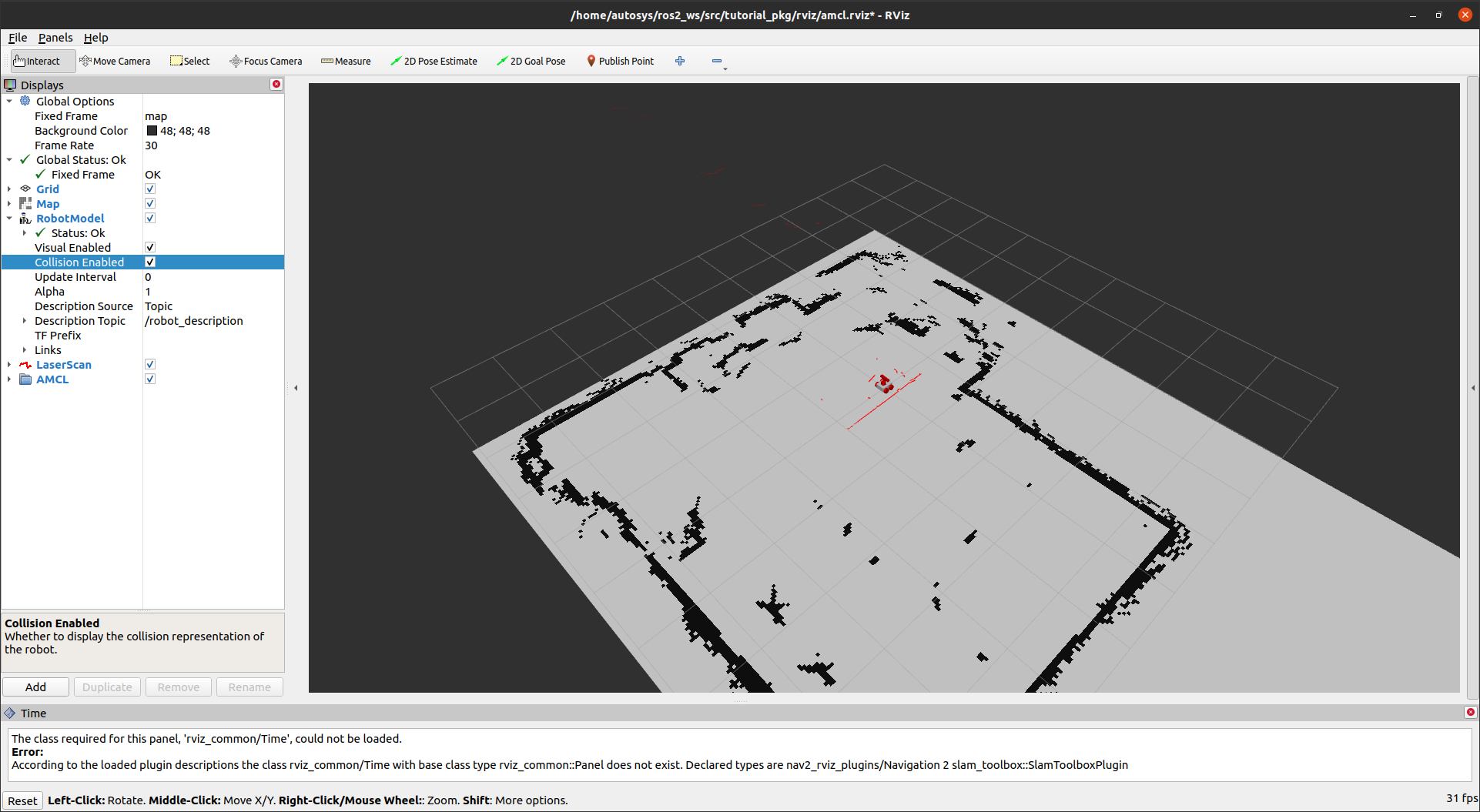
amcl is also working before the robot moves.
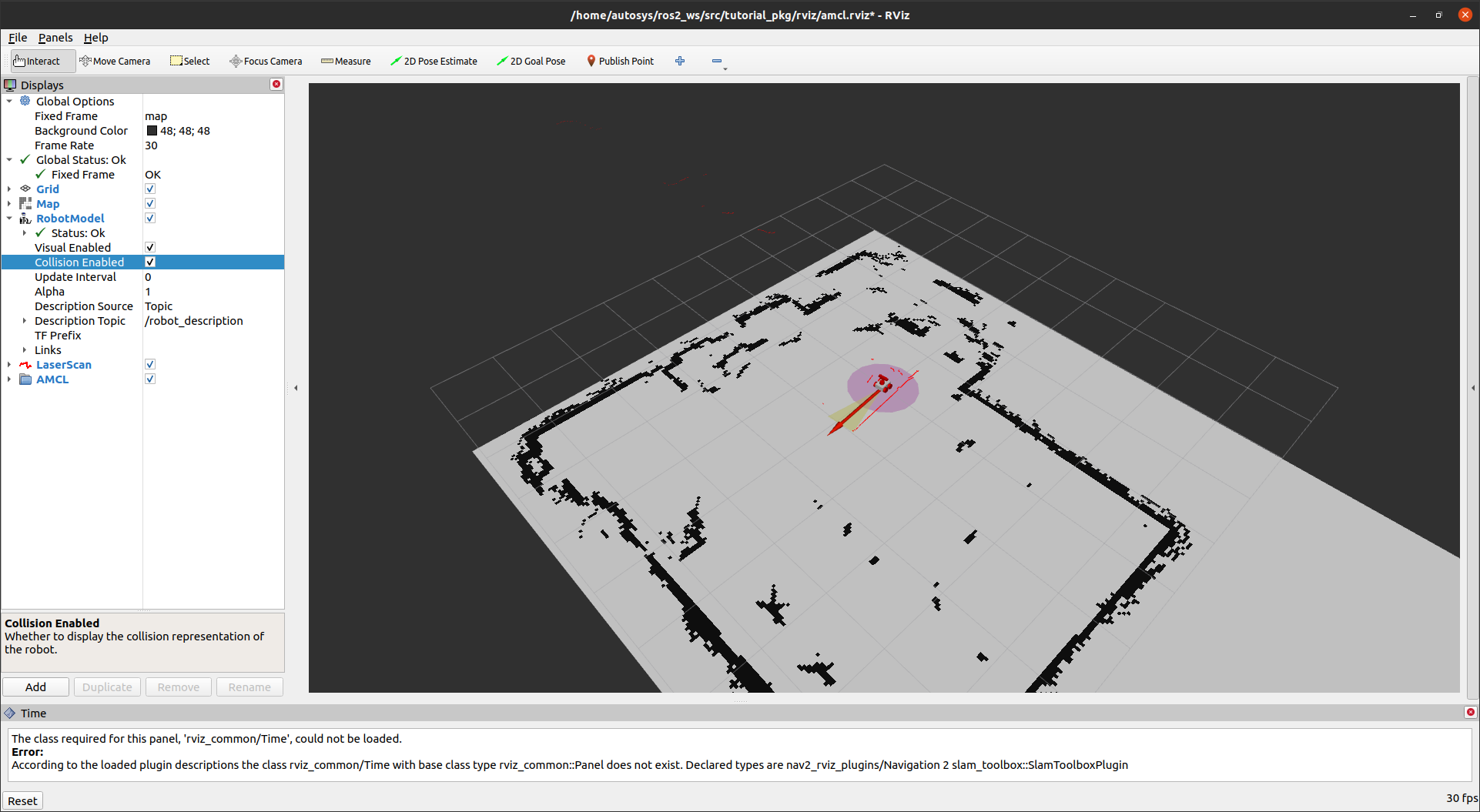
But once robot moves, there was error and robot doesn’t move in rviz2:
[ERROR] [amcl-2]: process has died [pid 125649, exit code -11,
I need help!
Hello @yongyun_song,
So that I can help you, I would ask you to send me the steps to reproduce the error. Preferably in a new thread.
I would also like to point out that the Turorials were created for ROS humble and for ROSbot XL. They may not work with ROS Jazzy, and therefore with ROSbot 3 if you have one.