Ok, you are receiving scans from astra with 11 frames per second.
Now, in another terminal window run
rviz
then:
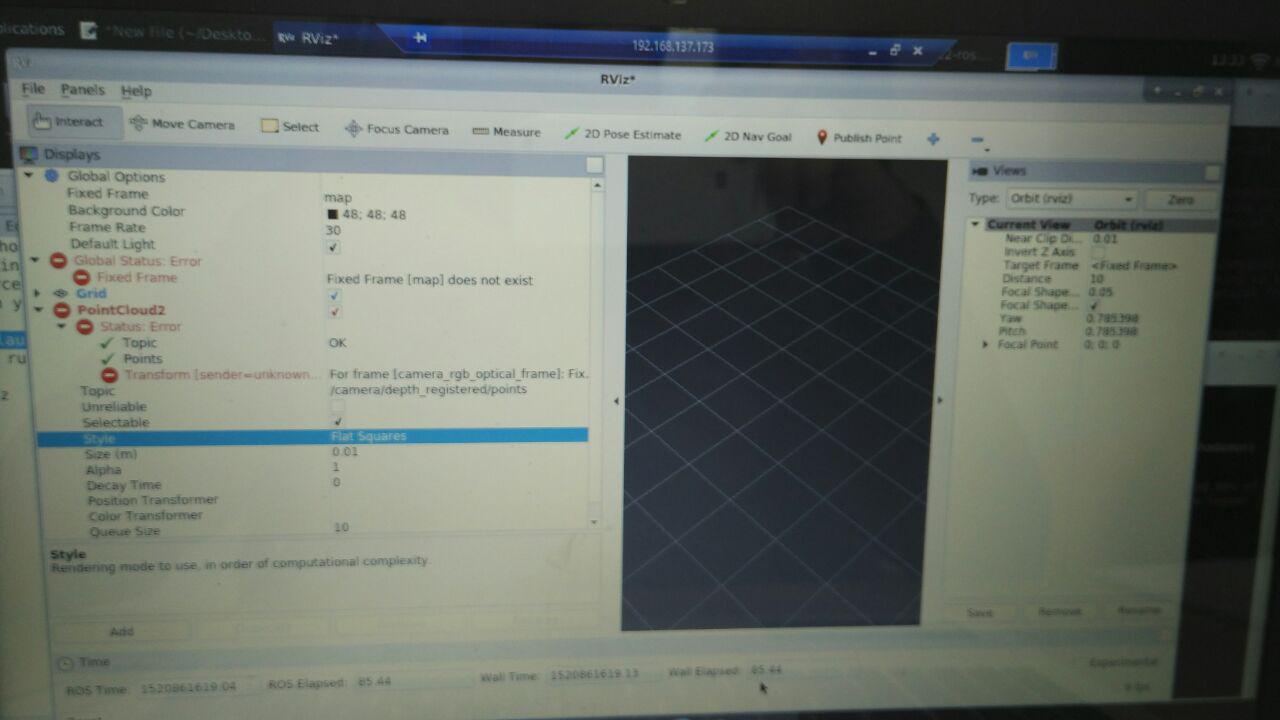
- click button “Add”
- select tab “by topic”
- choose camera → depth_registered->points
You should see something in visualization window.
Ok, you are receiving scans from astra with 11 frames per second.
Now, in another terminal window run
rviz
then:
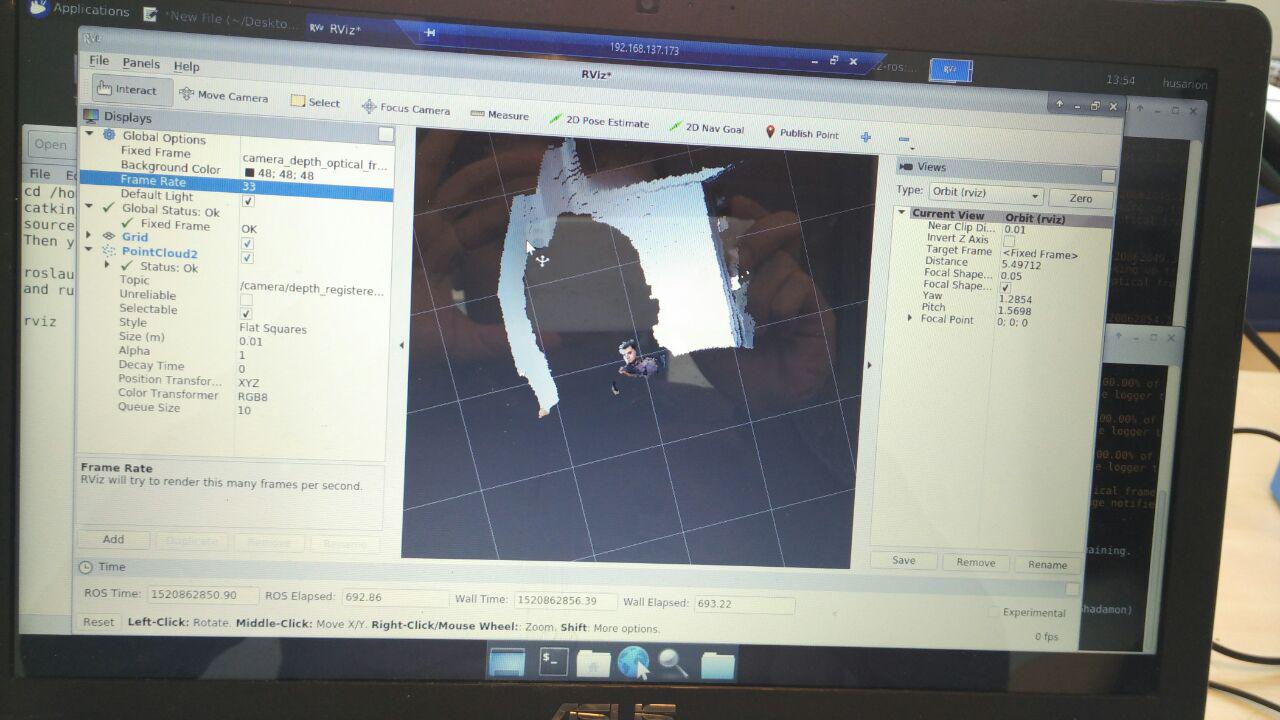
From menu Global Options → Fixed frame choose “camera_depth_optical_frame”
Quality of the pointcloud depends on the distance from scanned object and object surface. Try with some other object. You may also try the same object but from different viewpoint.
OK, thanks for your reply