Hi,
I would like to reopen this issue.
Randomly I’m getting this error when I try to bridge without the cloud:

By now the only way to get the bridge running is to restart the husarion several times. That’s super annoying. Is there any way to get the reason for this error? Any help is appreciated @lukasz.mitka.
I’ve just updated the whole husarion this morning.
Thanks in advance.
Edit:
I’ve kept reading around here and found a kind of similiar issues: https://community-mirror.husarion.com/t/bridging-ros-with-core2-module-unable-to-sync-with-device/463
So I’ll post your asked information from overthere here as well.
- Are you programming CORE2 with cloud or using VSC plugin?
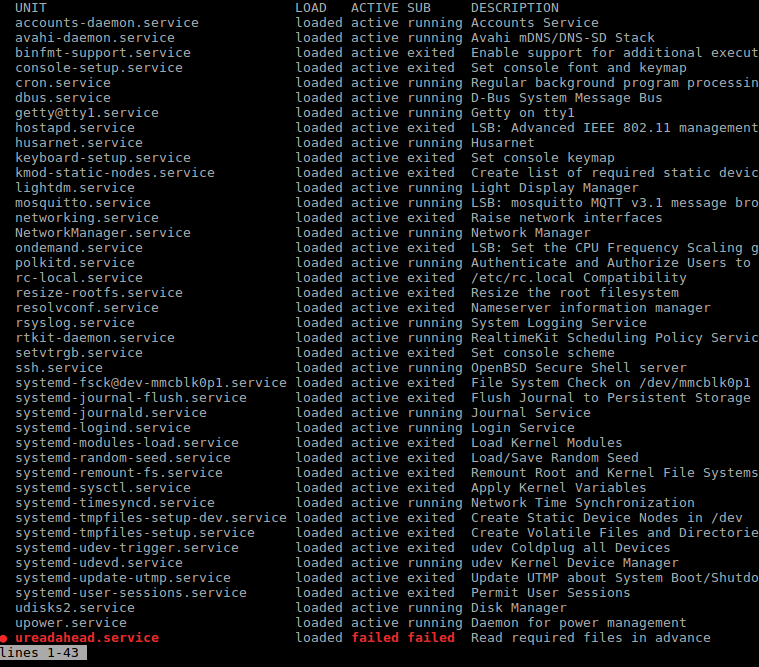
I’m using the VSC plugin and husarion isn’t connected to the husarion cloud. - Output of: systemctl list-units --type service
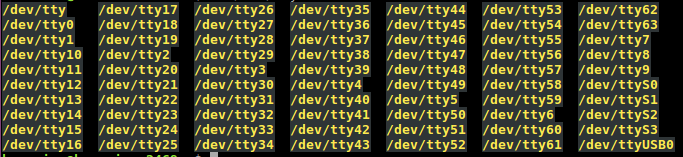
- Output of: ls /dev/tty*
- State of the LEDs on ROSbot rear panel.
PWR Led lights red. All other Leds aren’t lighting or blinking at all.
Edit 2:
I’ve activated the cloud again and flashed my main.cpp another time with the adjusted code.
→ still getting the same error