I am starting to work with robots and ROS 2, and I have two questions:
- Which SBC (Single Board Computer) is best suited for using ROS 2?
- For which SBC variants are there more tutorials and libraries available?
I am starting to work with robots and ROS 2, and I have two questions:
Hello @ssalimi,
The choice of SBC depends on how you plan to use the robot and for how long.
Here are the most important aspects to consider:
Below are the key points for each individual SBC:
Considering all these factors, the Intel NUC appears to be the most future-proof option. Its significant reserves of computing power make it suitable for even the most advanced projects.
When it comes to choosing the best learning set, I would choose ROSbot XL in the Autonomy Package version (with intel NUC). ROSbot XL itself, unlike ROSbot 2R/PRO, allows you to easy personalize and modify the connected sensors. Choosing the Autonomy Package allows you to navigate the robot thanks to data from lidar. You can then expand the navigation project with camera data (e.g. object tracking).
Hello, good day. I have a question about the SBC Nvidia Jetson libraries: Are all software and libraries available for free? Also, if I mount another camera, such as an IToF camera, is Nvidia capable of processing the data for image processing?
Thank you for your feedback.
And another question: which software can be installed on NVIDIA Jetson for image processing?
Hello again @ssalimi,
The operating system for Jetson is free and based on Ubuntu. In terms of library availability, it does not differ from regular Ubuntu. Connecting a ToF camera should not be a problem.
When it comes to available libraries, all popular software is available: OpenCV, TensorFlow, PyTorch, NVIDIA VisionWorks.
Let me know if I answered your question.
@RafalGorecki Thank you for your feedback. You have answered my question. As soon as I receive the robots, I will ask you more questions. Thank you for your support.
Hello good day,
I recently ordered a ROSbot XL and I am preparing for its setup. I have a few questions:
Thank you in advance for your support!
Best regards,
Hello @ssalimi,
rosbot_xl_ros package locally, especially useful, if you have no experience with Docker. Currently, we do not have instructions for this version (but I think there will be no major differences).I hope everything is clear and you will be satisfied with your purchase. If you have any doubts, don’t hesitate to write.
Regards
Thank you for your help and feedback.
Hello and good day,
I have a ROSbot XL with an SBC “Jetson Orin Nano” that I received from Generation Robots. Since it came the robot without the JetPack SDK 5.1.1 image, I had to install it myself and followed every step up to “Remote Access.”
I successfully completed the “Accessing ROSbot’s Linux Terminal” option 1, using a display, mouse, and keyboard as you recommended. I then connected the ROSbot to my Wi-Fi network and finished the Netplan configuration, saving my IP address.
After seeing the ROSbot XL running with its version displayed in the terminal via the Wi-Fi network, I could not gain access again using my password. In general, I am having difficulties getting the ROSbot up and running and do not know what the problem might be.
I have another problem: When I turn on the robot, the boot load screen appears, but after that, I don’t get any signal from the HDMI. At the same time, LED2 blinks with a red light, and I don’t see any way to log in as a user. However, the fan on the Jetson is running extremely fast. Could this be because I’m charging the robot while trying to operate the Jetson at the same time?
Regards
Hello @ssalimi, I just sent you a private msg.
Hi @RafalGorecki
Thank you for your feedback.
I went through all the installations again from the beginning, and the initial problem has been resolved. However, a new issue has arisen. There are difficulties when connecting the Logitech 710 Gamepad.
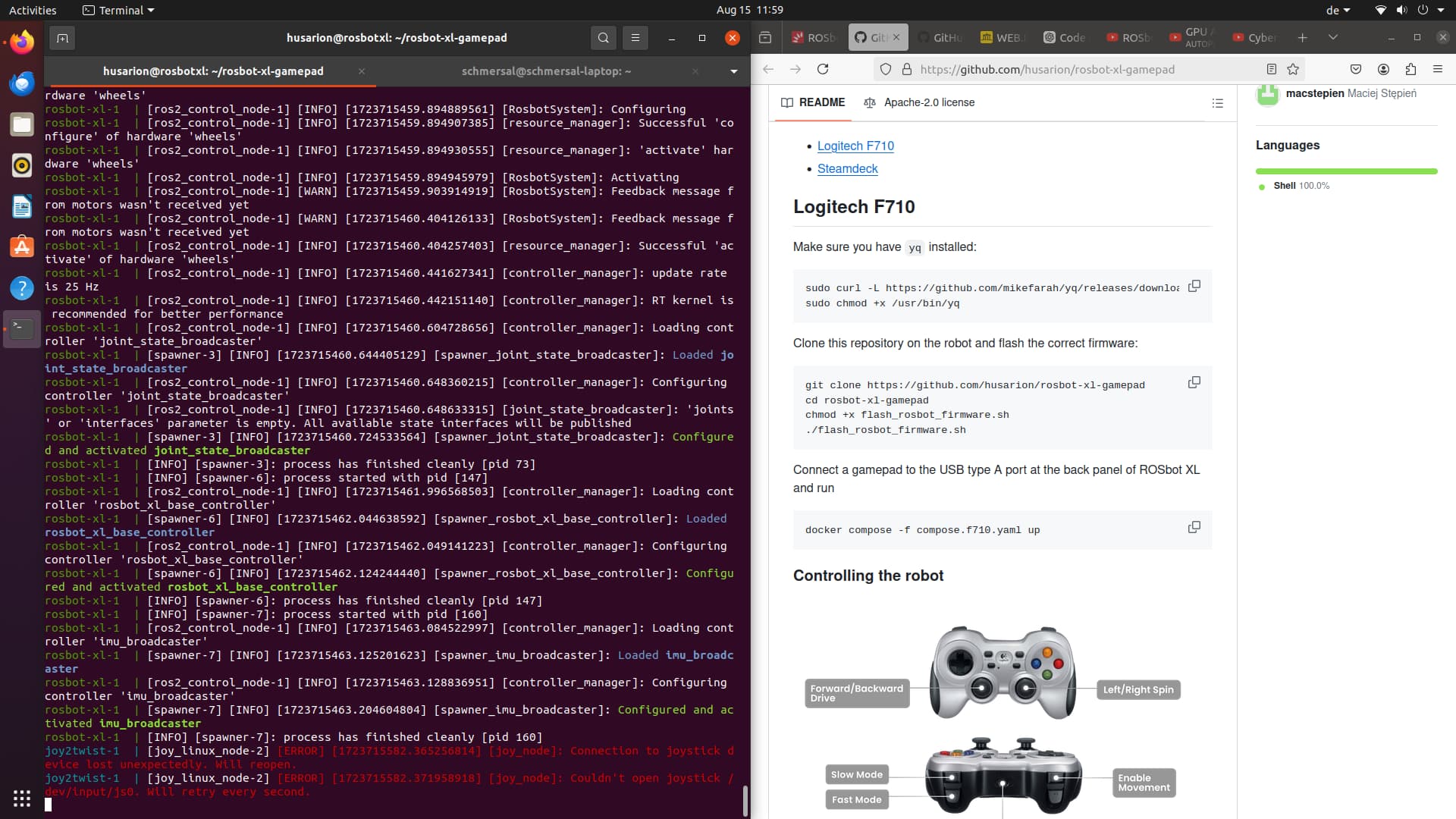
The instructions recommend using the D-mode to control the robot with the gamepad. However, when I follow the GitHub instructions and use D-mode, I receive an error message.
When I switch to X-mode, the controls work in general, but there are still issues. For instance, some buttons don’t function as described in the instructions, and there are limitations with holonomic movement.
I haven’t installed the Husarion joy2twist repository yet, as I want to ensure I’m taking the right steps.
Could you please help me resolve this issue? I would appreciate any guidance you can provide.
Hello @ssalimi,
To keep order, it would be good to move this issue unrelated with the main topic, to a new thread.
The error appears as if the device is not recognized/found in the system. Does the problem occur every time you reset compos? Make sure the dongle is inserted and plug it before running the script.
I don’t currently have access to a joystick to run tests. Could I ask you to run the following instructions on the rosbot:
git clone https://github.com/husarion/joy2twist.git
cd joy2twist/demo/single_robot
docker compose compose.rosbotxl.yaml up