Hello,
I am writing to request some help regarding the issues about controlling two Rosbot.
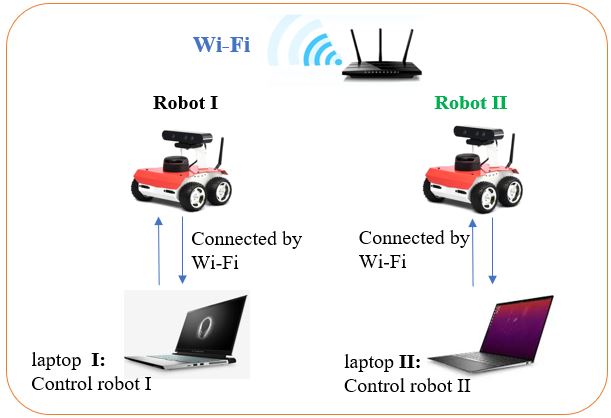
Our Task: want to control two ROSBot, each ROSBot is connected to a laptop that runs a control algorithm (see the attached figure).
Issue: the algorithm runs pretty fast with a single robot, but if we run the algorithm for two robots simultaneously (using two laptops), the algorithm speed becomes extremely slow for each ROSBot. This issue exists whether we connect the two ROSBot to the same router or to two different routers (one router for each ROSBot).
Question: How can we use two ROSBot simultaneously? What could be the reason that the algorithm slows down whenever a second robot starts running (it seems that the two ROSBot are affecting each other even when we connect them to two different routers)?