Hello,
Thanks for ROS tutorial update and i have learnt planner parameter changes in path planning section.
ROSbot2r get better planning effect now but i got this move_base log warn and please kindly let me know how to control this forward simulation of move_base parameters.I am also confused it may be effective by core2 firmware for odom and imu fusion.
I am really sorry for asking repeated questions but i really hope suggestion from you could be solved this problem clearly.
Best Regards
goldcold
Hi @goldcold!
I have a suspicion that this is due to the performance.
Could you share the output of htop command in the another ROSbot’s terminal during the program is running?
Try to note if the warnings are related to the CPU usage.
Best regards,
Jakub Delicat
Hi @JakubDelicat
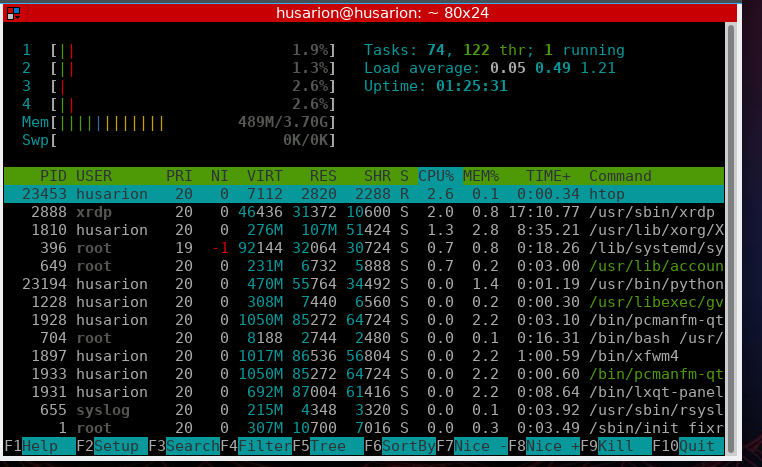
I want to share htop outputs and could you share me which warnings that i should look to consider.
Before running nothing,
Starting Navigation Node,
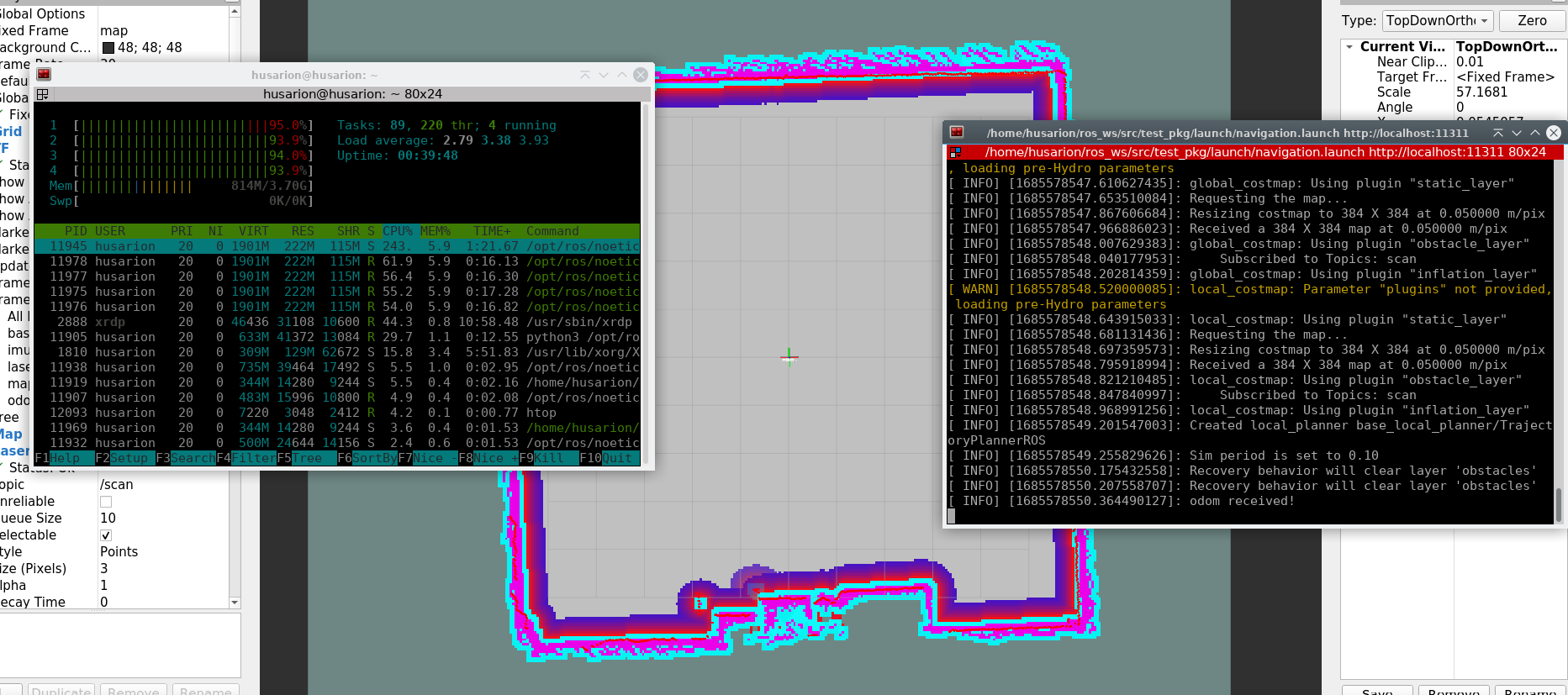
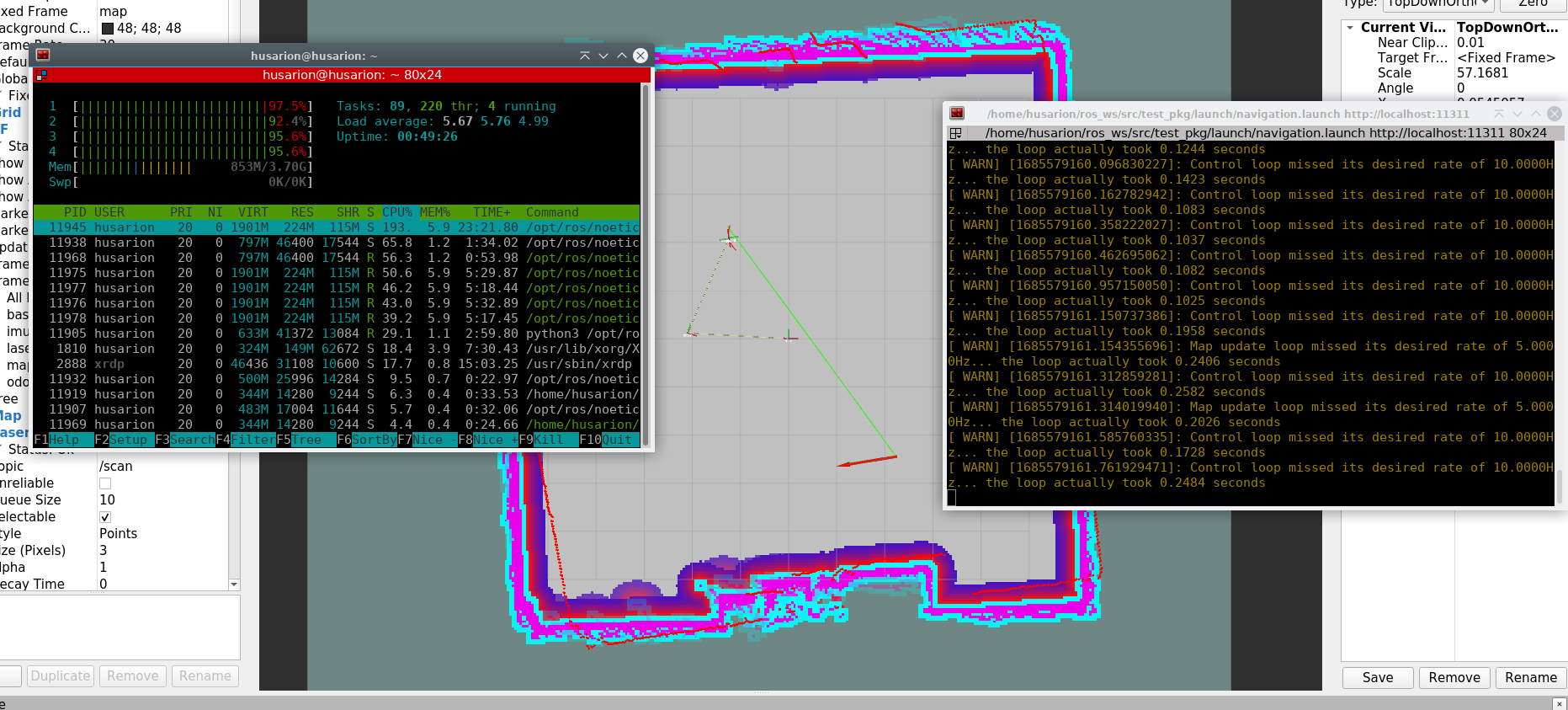
Running Navigation,
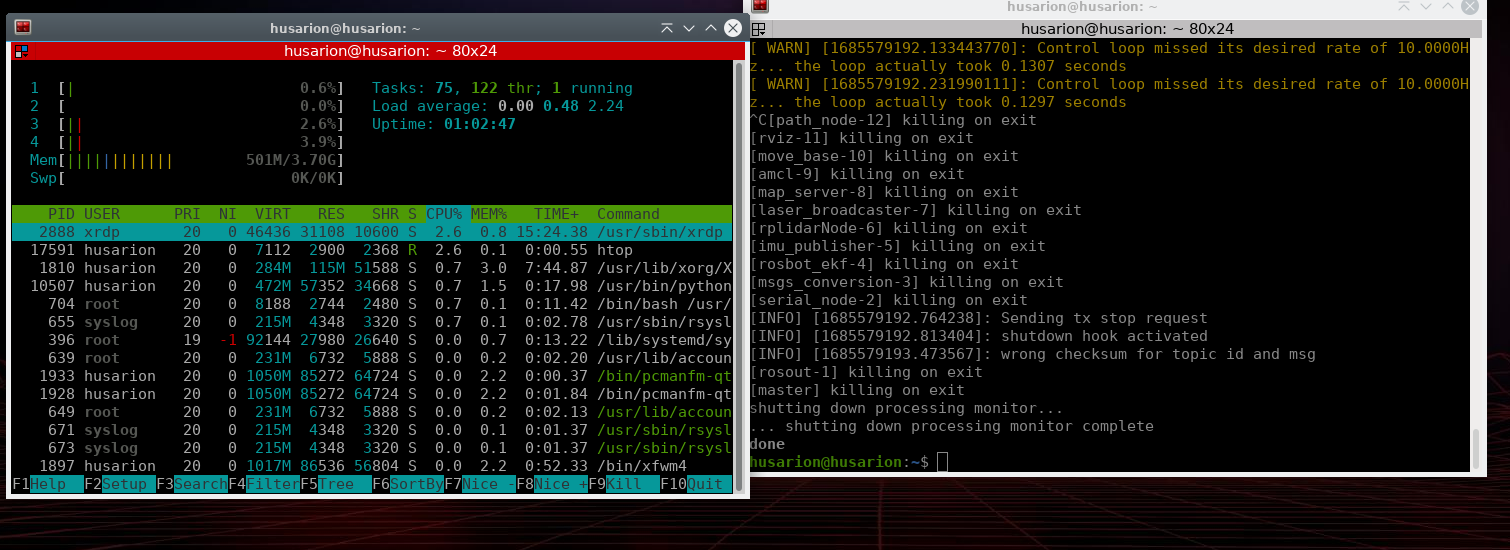
Node stop,
Best Regards
goldcold
Is the warning: Control loop missed its desire rate... related to the entire CPU usage like four times 100% (you can see the CPU usage in htop) or just about 95%?
Regards,
JD
I think maximum CPU usage is around 300 by rviz when navigation node is running.
Does it mean that some parameters of costmap need to adjust?
Best Regards
goldcold
I think it is a performance issue. The costmap parameters should be good.
However, if you have access to another machine with ROS, I recommend trying to use RViz on that machine instead of ROSbot. By doing so, you can closely examine any warning messages that may appear and gather more information about the problem.
Best regards,
JD
Thank you for your answer. I will try it.
And is it also possible to connect my rosbot by real robot section of the construct?
Best regards,
goldcold
Hello @goldcold
Yes, it is absolutely possible.
I think you will be able to click through theConstruct, and if you don’t want to, we are currently working on a detailed instruction in this topic.
I will add that the Real Robot Connection on theConstruct is based on Husarnet, so instead of using theConstruct UI, you can also simply connect your ROSject to the robot using the Husarnet CLI.
Here is the cheat sheet how to use Husarnet: Husarnet Documentation | Husarnet
Best regards
Jan Brzyk

