with your help in here, I did successfully run my rosbot 2.0 pro in namespace under ROS Kinetic. here is my repository launch_rosbot.
Recently, I updated my rosbot 2.0 pro from ROS Kinetic to Melodic, and then it failed!!!
Here is what I did:
I started roscore and map_server at a master node
I started my rosbot by roslaunch launch_rosbot launch_rosbot_with_name.launch
Then, I will get warning like:
Warning: Invalid argument “/map” passed to canTransform argument target_frame in tf2 frame_ids cannot start with a ‘/’ like:
at line 134 in /tmp/binarydeb/ros-melodic-tf2-0.6.5/src/buffer_core.cpp
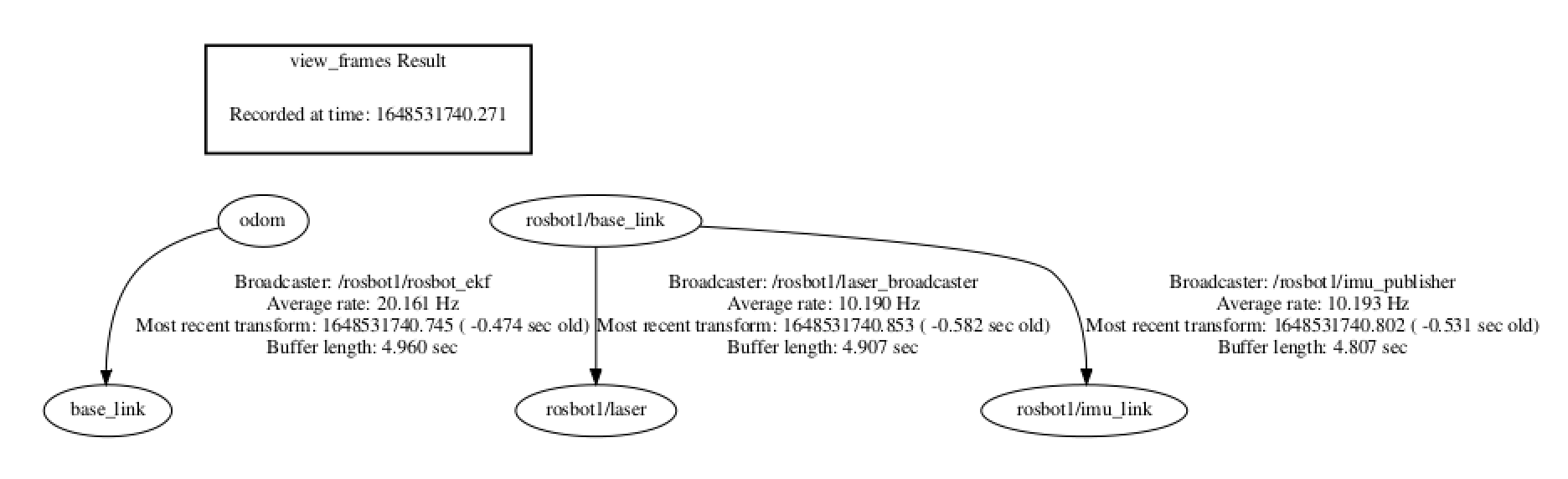
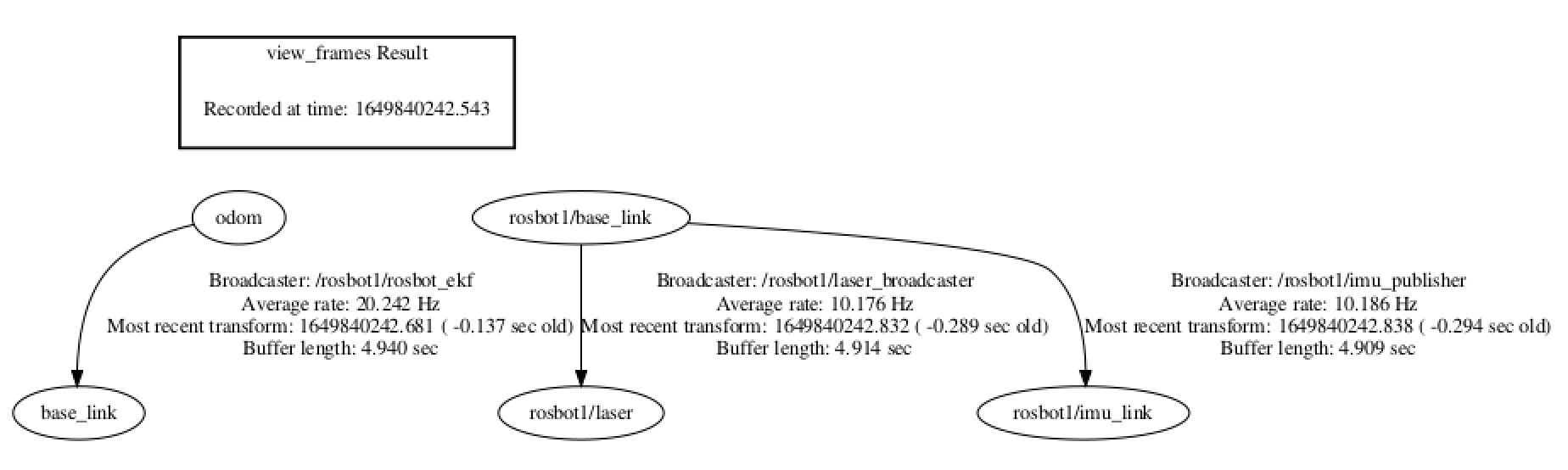
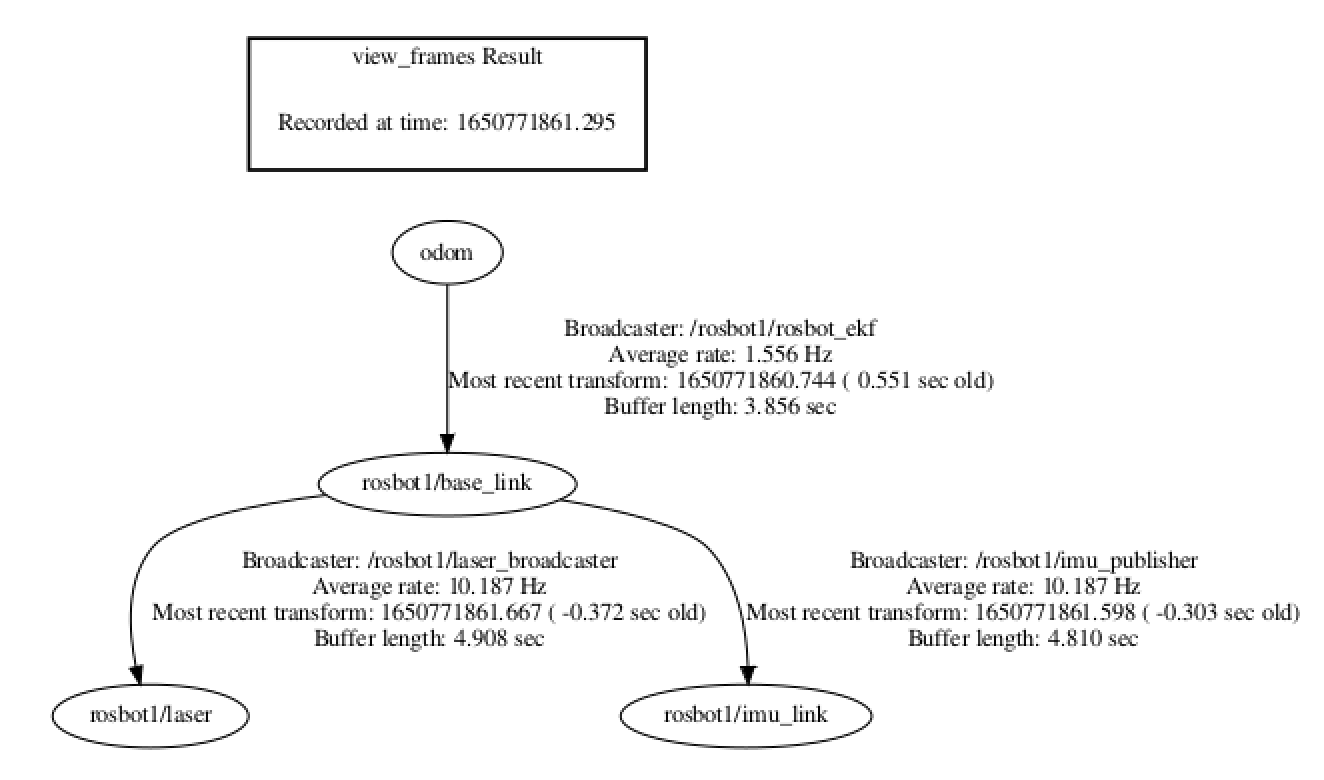
and TF tree will not build successfully, it looks like:
I’m afraid that it is also necessary to change the serial_baudrate value in this line to 525000.
Make sure you are using the latest rosbot_ekf and the latest firmware (0.15.0) for Melodic.
Please, let me know about it. If you have any questions/troubles, do not hesitate to ask.
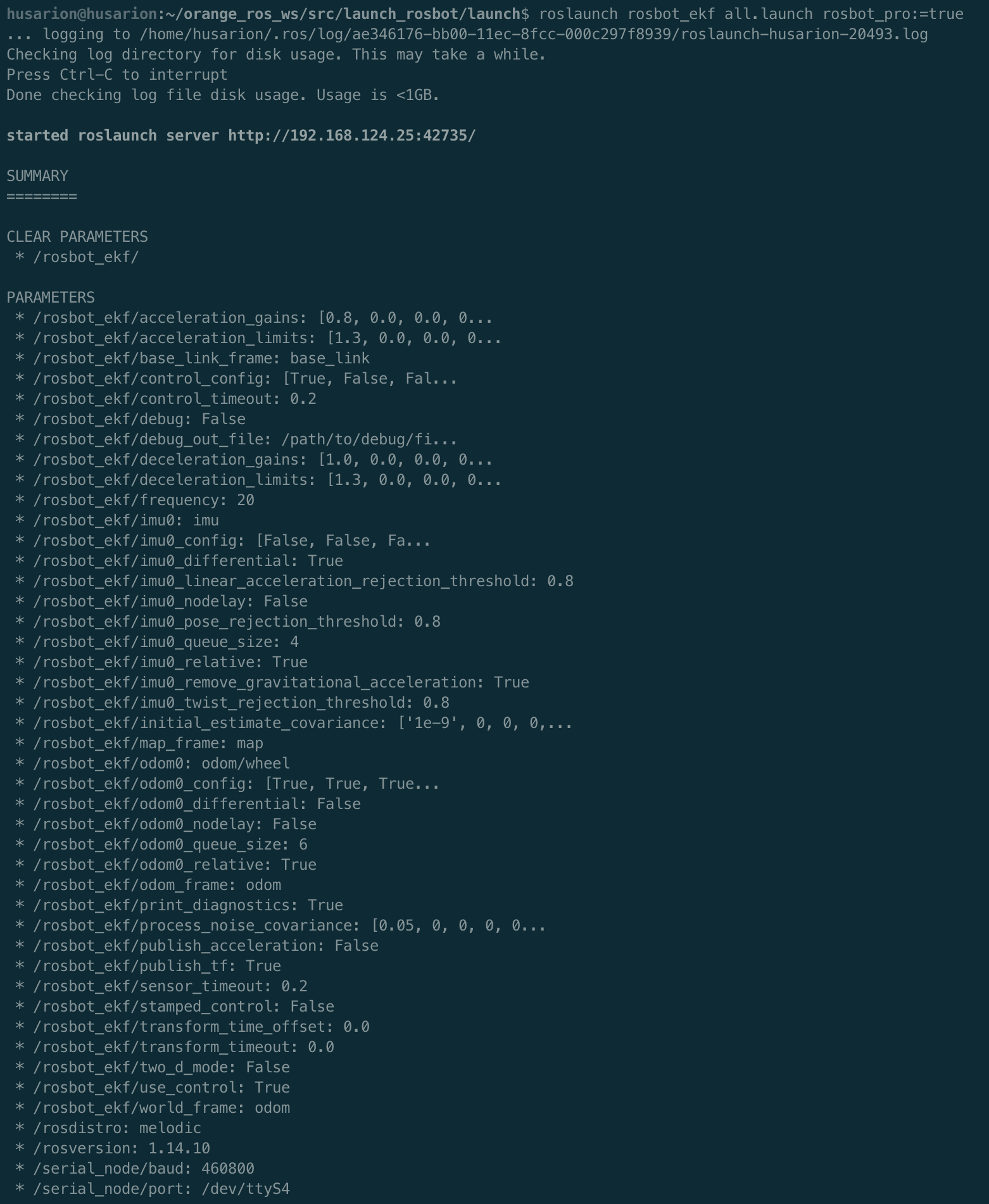
But I found a weird thing that the rosbot_ekf is still using 460800 as the serial_baudrate, you can find it in the output after I run roslaunch rosbot_ekf all.launch rosbot_pro:=true,
and a warning [ WARN] [1649838454.832404604]: Transform from imu_link to base_link was unavailable for the time requested. Using latest instead. keeps pop out.
If I change serial_baudrate to 508000 in my scripts in my start_namesapce.launch in which I updated line 11-13 as your suggested and also remove the start / from line 17, there will be an error promt [ERROR] [1649837529.985029]: Unable to sync with device; possible link problem or link software version mismatch such as hydro rosserial_python with groovy Arduino after I run my own scripts launch_rosbot_with_name.launch
Here is the full log when I use 525000 as the value of serial_baudrate,
... logging to /home/husarion/.ros/log/ae346176-bb00-11ec-8fcc-000c297f8939/roslaunch-husarion-28361.log
Checking log directory for disk usage. This may take a while.
Press Ctrl-C to interrupt
Done checking log file disk usage. Usage is <1GB.
started roslaunch server http://192.168.124.25:46051/
SUMMARY
========
CLEAR PARAMETERS
* /rosbot1/rosbot_ekf/
PARAMETERS
* /rosbot1/amcl/base_frame_id: /rosbot1/base_link
* /rosbot1/amcl/global_frame_id: map
* /rosbot1/amcl/initial_pose_x: 0.0
* /rosbot1/amcl/initial_pose_y: 0.0
* /rosbot1/amcl/initial_pose_z: 0.0
* /rosbot1/amcl/max_particles: 5000
* /rosbot1/amcl/min_particles: 1000
* /rosbot1/amcl/odom_frame_id: /rosbot1/odom
* /rosbot1/amcl/odom_model_type: diff-corrected
* /rosbot1/amcl/update_min_a: 1.0
* /rosbot1/amcl/update_min_d: 0.1
* /rosbot1/amcl/use_map_topic: True
* /rosbot1/move_base_rosbot/DWAPlannerROS/global_frame_id: rosbot1/odom
* /rosbot1/move_base_rosbot/TrajectoryPlannerROS/acc_lim_Y: 1.5
* /rosbot1/move_base_rosbot/TrajectoryPlannerROS/acc_lim_theta: 5.0
* /rosbot1/move_base_rosbot/TrajectoryPlannerROS/acc_lim_x: 1.5
* /rosbot1/move_base_rosbot/TrajectoryPlannerROS/holonomic_robot: False
* /rosbot1/move_base_rosbot/TrajectoryPlannerROS/max_vel_theta: 2.5
* /rosbot1/move_base_rosbot/TrajectoryPlannerROS/max_vel_x: 0.1
* /rosbot1/move_base_rosbot/TrajectoryPlannerROS/meter_scoring: True
* /rosbot1/move_base_rosbot/TrajectoryPlannerROS/min_in_place_vel_theta: 0.25
* /rosbot1/move_base_rosbot/TrajectoryPlannerROS/min_vel_theta: -2.5
* /rosbot1/move_base_rosbot/TrajectoryPlannerROS/min_vel_x: 0.01
* /rosbot1/move_base_rosbot/TrajectoryPlannerROS/xy_goal_tolerance: 0.1
* /rosbot1/move_base_rosbot/TrajectoryPlannerROS/yaw_goal_tolerance: 0.05
* /rosbot1/move_base_rosbot/global_costmap/\obstacle_range: 6.0
* /rosbot1/move_base_rosbot/global_costmap/always_send_full_costmap: True
* /rosbot1/move_base_rosbot/global_costmap/footprint: [[0.12, 0.14], [0...
* /rosbot1/move_base_rosbot/global_costmap/global_frame: map
* /rosbot1/move_base_rosbot/global_costmap/height: 25
* /rosbot1/move_base_rosbot/global_costmap/inflation_radius: 2.5
* /rosbot1/move_base_rosbot/global_costmap/laser_scan_sensor/clearing: True
* /rosbot1/move_base_rosbot/global_costmap/laser_scan_sensor/data_type: LaserScan
* /rosbot1/move_base_rosbot/global_costmap/laser_scan_sensor/marking: True
* /rosbot1/move_base_rosbot/global_costmap/laser_scan_sensor/sensor_frame: rosbot1/laser
* /rosbot1/move_base_rosbot/global_costmap/laser_scan_sensor/topic: /rosbot1/scan
* /rosbot1/move_base_rosbot/global_costmap/map_topic: map
* /rosbot1/move_base_rosbot/global_costmap/observation_sources: laser_scan_sensor
* /rosbot1/move_base_rosbot/global_costmap/publish_frequency: 0.5
* /rosbot1/move_base_rosbot/global_costmap/raytrace_range: 8.5
* /rosbot1/move_base_rosbot/global_costmap/resolution: 0.01
* /rosbot1/move_base_rosbot/global_costmap/robot_base_frame: rosbot1/base_link
* /rosbot1/move_base_rosbot/global_costmap/rolling_window: True
* /rosbot1/move_base_rosbot/global_costmap/static_map: True
* /rosbot1/move_base_rosbot/global_costmap/subscribe_to_updates: True
* /rosbot1/move_base_rosbot/global_costmap/transform_tolerance: 0.8
* /rosbot1/move_base_rosbot/global_costmap/update_frequency: 0.5
* /rosbot1/move_base_rosbot/global_costmap/width: 50
* /rosbot1/move_base_rosbot/local_costmap/\obstacle_range: 6.0
* /rosbot1/move_base_rosbot/local_costmap/always_send_full_costmap: True
* /rosbot1/move_base_rosbot/local_costmap/footprint: [[0.12, 0.14], [0...
* /rosbot1/move_base_rosbot/local_costmap/global_frame: rosbot1/odom
* /rosbot1/move_base_rosbot/local_costmap/height: 3
* /rosbot1/move_base_rosbot/local_costmap/inflation_radius: 1.0
* /rosbot1/move_base_rosbot/local_costmap/laser_scan_sensor/clearing: True
* /rosbot1/move_base_rosbot/local_costmap/laser_scan_sensor/data_type: LaserScan
* /rosbot1/move_base_rosbot/local_costmap/laser_scan_sensor/marking: True
* /rosbot1/move_base_rosbot/local_costmap/laser_scan_sensor/sensor_frame: rosbot1/laser
* /rosbot1/move_base_rosbot/local_costmap/laser_scan_sensor/topic: /rosbot1/scan
* /rosbot1/move_base_rosbot/local_costmap/map_topic: map
* /rosbot1/move_base_rosbot/local_costmap/observation_sources: laser_scan_sensor
* /rosbot1/move_base_rosbot/local_costmap/origin_x: -1.5
* /rosbot1/move_base_rosbot/local_costmap/origin_y: -1.5
* /rosbot1/move_base_rosbot/local_costmap/publish_frequency: 5
* /rosbot1/move_base_rosbot/local_costmap/raytrace_range: 8.5
* /rosbot1/move_base_rosbot/local_costmap/resolution: 0.01
* /rosbot1/move_base_rosbot/local_costmap/robot_base_frame: rosbot1/base_link
* /rosbot1/move_base_rosbot/local_costmap/rolling_window: True
* /rosbot1/move_base_rosbot/local_costmap/static_map: True
* /rosbot1/move_base_rosbot/local_costmap/subscribe_to_updates: True
* /rosbot1/move_base_rosbot/local_costmap/transform_tolerance: 0.25
* /rosbot1/move_base_rosbot/local_costmap/update_frequency: 5
* /rosbot1/move_base_rosbot/local_costmap/width: 3
* /rosbot1/rosbot_ekf/acceleration_gains: [0.8, 0.0, 0.0, 0...
* /rosbot1/rosbot_ekf/acceleration_limits: [1.3, 0.0, 0.0, 0...
* /rosbot1/rosbot_ekf/base_link_frame: base_link
* /rosbot1/rosbot_ekf/control_config: [True, False, Fal...
* /rosbot1/rosbot_ekf/control_timeout: 0.2
* /rosbot1/rosbot_ekf/debug: False
* /rosbot1/rosbot_ekf/debug_out_file: /path/to/debug/fi...
* /rosbot1/rosbot_ekf/deceleration_gains: [1.0, 0.0, 0.0, 0...
* /rosbot1/rosbot_ekf/deceleration_limits: [1.3, 0.0, 0.0, 0...
* /rosbot1/rosbot_ekf/frequency: 20
* /rosbot1/rosbot_ekf/imu0: imu
* /rosbot1/rosbot_ekf/imu0_config: [False, False, Fa...
* /rosbot1/rosbot_ekf/imu0_differential: True
* /rosbot1/rosbot_ekf/imu0_linear_acceleration_rejection_threshold: 0.8
* /rosbot1/rosbot_ekf/imu0_nodelay: False
* /rosbot1/rosbot_ekf/imu0_pose_rejection_threshold: 0.8
* /rosbot1/rosbot_ekf/imu0_queue_size: 4
* /rosbot1/rosbot_ekf/imu0_relative: True
* /rosbot1/rosbot_ekf/imu0_remove_gravitational_acceleration: True
* /rosbot1/rosbot_ekf/imu0_twist_rejection_threshold: 0.8
* /rosbot1/rosbot_ekf/initial_estimate_covariance: ['1e-9', 0, 0, 0,...
* /rosbot1/rosbot_ekf/map_frame: map
* /rosbot1/rosbot_ekf/odom0: odom/wheel
* /rosbot1/rosbot_ekf/odom0_config: [True, True, True...
* /rosbot1/rosbot_ekf/odom0_differential: False
* /rosbot1/rosbot_ekf/odom0_nodelay: False
* /rosbot1/rosbot_ekf/odom0_queue_size: 6
* /rosbot1/rosbot_ekf/odom0_relative: True
* /rosbot1/rosbot_ekf/odom_frame: odom
* /rosbot1/rosbot_ekf/print_diagnostics: True
* /rosbot1/rosbot_ekf/process_noise_covariance: [0.05, 0, 0, 0, 0...
* /rosbot1/rosbot_ekf/publish_acceleration: False
* /rosbot1/rosbot_ekf/publish_tf: True
* /rosbot1/rosbot_ekf/sensor_timeout: 0.2
* /rosbot1/rosbot_ekf/stamped_control: False
* /rosbot1/rosbot_ekf/transform_time_offset: 0.0
* /rosbot1/rosbot_ekf/transform_timeout: 0.0
* /rosbot1/rosbot_ekf/two_d_mode: False
* /rosbot1/rosbot_ekf/use_control: True
* /rosbot1/rosbot_ekf/world_frame: odom
* /rosbot1/rplidar/angle_compensate: True
* /rosbot1/rplidar/frame_id: /rosbot1/laser
* /rosbot1/rplidar/serial_baudrate: 256000
* /rosbot1/rplidar/tf_prefix: rosbot1
* /rosbot1/serial_node/baud: 525000
* /rosbot1/serial_node/port: /dev/ttyS4
* /rosdistro: melodic
* /rosversion: 1.14.10
NODES
/rosbot1/
amcl (amcl/amcl)
imu_publisher (tf/static_transform_publisher)
laser_broadcaster (tf/static_transform_publisher)
move_base_rosbot (move_base/move_base)
msgs_conversion (rosbot_ekf/msgs_conversion)
rosbot_ekf (robot_localization/ekf_localization_node)
rplidar (rplidar_ros/rplidarNode)
serial_node (rosserial_python/serial_node.py)
ROS_MASTER_URI=http://192.168.124.39:11311
process[rosbot1/rplidar-1]: started with pid [28564]
process[rosbot1/serial_node-2]: started with pid [28566]
process[rosbot1/msgs_conversion-3]: started with pid [28577]
process[rosbot1/rosbot_ekf-4]: started with pid [28580]
process[rosbot1/imu_publisher-5]: started with pid [28581]
process[rosbot1/laser_broadcaster-6]: started with pid [28591]
process[rosbot1/amcl-7]: started with pid [28607]
process[rosbot1/move_base_rosbot-8]: started with pid [28615]
[ WARN] [1649837512.026224423]: Both imu0_differential and imu0_relative were set to true. Using differential mode.
[ WARN] [1649837512.295228568]: ignoring NAN in initial pose Yaw
[ INFO] [1649837512.488338031]: Subscribed to map topic.
[INFO] [1649837512.799668]: ROS Serial Python Node
[INFO] [1649837512.847558]: Connecting to /dev/ttyS4 at 525000 baud
[INFO] [1649837514.977152]: Requesting topics...
[ WARN] [1649837517.422660232]: Timed out waiting for transform from rosbot1/base_link to map to become available before running costmap, tf error: canTransform: target_frame map does not exist.. canTransform returned after 0.100158 timeout was 0.1.
[ WARN] [1649837522.468475319]: Timed out waiting for transform from rosbot1/base_link to map to become available before running costmap, tf error: canTransform: target_frame map does not exist.. canTransform returned after 0.101105 timeout was 0.1.
[ WARN] [1649837527.501984393]: Timed out waiting for transform from rosbot1/base_link to map to become available before running costmap, tf error: canTransform: target_frame map does not exist.. canTransform returned after 0.10095 timeout was 0.1.
[ WARN] [1649837527.997069397]: No laser scan received (and thus no pose updates have been published) for 1649837527.996922 seconds. Verify that data is being published on the /rosbot1/scan topic.
[ERROR] [1649837529.985029]: Unable to sync with device; possible link problem or link software version mismatch such as hydro rosserial_python with groovy Arduino
After I restore the serial_baudrate as 460800, the [ERROR] [1649837529.985029]: Unable to sync with device; possible link problem or link software version mismatch such as hydro rosserial_python with groovy Arduino will dispear, but the warnings about tf error and no laser scan recieved are still there,
[ WARN] [1649839825.251990027]: Could not obtain transform from imu_link to base_link. Error was "imu_link" passed to lookupTransform argument source_frame does not exist.
[ WARN] [1649839826.739516513]: Timed out waiting for transform from rosbot1/base_link to map to become available before running costmap, tf error: canTransform: target_frame map does not exist.. canTransform returned after 0.100976 timeout was 0.1.
[ WARN] [1649839827.351328523]: Could not obtain transform from imu_link to base_link. Error was "imu_link" passed to lookupTransform argument source_frame does not exist.
[ WARN] [1649839829.351358318]: Could not obtain transform from imu_link to base_link. Error was "imu_link" passed to lookupTransform argument source_frame does not exist.
[ WARN] [1649839831.351481280]: Could not obtain transform from imu_link to base_link. Error was "imu_link" passed to lookupTransform argument source_frame does not exist.
[ WARN] [1649839831.884934991]: Timed out waiting for transform from rosbot1/base_link to map to become available before running costmap, tf error: canTransform: target_frame map does not exist.. canTransform returned after 0.100317 timeout was 0.1.
[ WARN] [1649839836.920249014]: Timed out waiting for transform from rosbot1/base_link to map to become available before running costmap, tf error: canTransform: target_frame map does not exist.. canTransform returned after 0.100835 timeout was 0.1.
[ WARN] [1649839837.151363684]: Could not obtain transform from imu_link to base_link. Error was "imu_link" passed to lookupTransform argument source_frame does not exist.
[ WARN] [1649839837.304792733]: No laser scan received (and thus no pose updates have been published) for 1649839837.304642 seconds. Verify that data is being published on the /rosbot1/scan topic.
Hi,
I’m afarid you firmware version is incompatible with your rosbot_ekf package. Just to be 100% sure, please flash the latest firmware version (0.15.0). There are two possibilities:
try to build the PlatformIO project and flash firmware using stm32loader (github repo with instruction), or,
use our Docker image, which allows you to easily build and upload the latest firmware version. It’s just one command and a few minutes of waiting (github report with instruction)
Also replace your ekf package with its latest version.
Please, let me know about it. If you have any questions/troubles, do not hesitate to ask.
[ WARN] [1650255759.606458809]: Could not obtain transform from odom to rosbot1/odom. Error was “rosbot1/odom” passed to lookupTransform argument target_frame does not exist.
[ WARN] [1650255765.656814882]: Could not obtain transform from imu_link to rosbot1/base_link. Error was “imu_link” passed to lookupTransform argument source_frame does not exist.
[ WARN] [1650255766.086621613]: Timed out waiting for transform from rosbot1/base_link to map to become available before running costmap, tf error: canTransform: target_frame map does not exist… canTransform returned after 0.100278 timeout was 0.1.
here is the full logs for your reference,
... logging to /home/husarion/.ros/log/ae346176-bb00-11ec-8fcc-000c297f8939/roslaunch-husarion-10625.log
Checking log directory for disk usage. This may take a while.
Press Ctrl-C to interrupt
Done checking log file disk usage. Usage is <1GB.
started roslaunch server http://192.168.124.25:44147/
SUMMARY
========
CLEAR PARAMETERS
* /rosbot1/rosbot_ekf/
PARAMETERS
* /rosbot1/amcl/base_frame_id: /rosbot1/base_link
* /rosbot1/amcl/global_frame_id: map
* /rosbot1/amcl/initial_pose_x: 0.0
* /rosbot1/amcl/initial_pose_y: 0.0
* /rosbot1/amcl/initial_pose_z: 0.0
* /rosbot1/amcl/max_particles: 5000
* /rosbot1/amcl/min_particles: 1000
* /rosbot1/amcl/odom_frame_id: /rosbot1/odom
* /rosbot1/amcl/odom_model_type: diff-corrected
* /rosbot1/amcl/update_min_a: 1.0
* /rosbot1/amcl/update_min_d: 0.1
* /rosbot1/amcl/use_map_topic: True
* /rosbot1/move_base_rosbot/DWAPlannerROS/global_frame_id: rosbot1/odom
* /rosbot1/move_base_rosbot/TrajectoryPlannerROS/acc_lim_Y: 1.5
* /rosbot1/move_base_rosbot/TrajectoryPlannerROS/acc_lim_theta: 5.0
* /rosbot1/move_base_rosbot/TrajectoryPlannerROS/acc_lim_x: 1.5
* /rosbot1/move_base_rosbot/TrajectoryPlannerROS/holonomic_robot: False
* /rosbot1/move_base_rosbot/TrajectoryPlannerROS/max_vel_theta: 2.5
* /rosbot1/move_base_rosbot/TrajectoryPlannerROS/max_vel_x: 0.1
* /rosbot1/move_base_rosbot/TrajectoryPlannerROS/meter_scoring: True
* /rosbot1/move_base_rosbot/TrajectoryPlannerROS/min_in_place_vel_theta: 0.25
* /rosbot1/move_base_rosbot/TrajectoryPlannerROS/min_vel_theta: -2.5
* /rosbot1/move_base_rosbot/TrajectoryPlannerROS/min_vel_x: 0.01
* /rosbot1/move_base_rosbot/TrajectoryPlannerROS/xy_goal_tolerance: 0.1
* /rosbot1/move_base_rosbot/TrajectoryPlannerROS/yaw_goal_tolerance: 0.05
* /rosbot1/move_base_rosbot/global_costmap/\obstacle_range: 6.0
* /rosbot1/move_base_rosbot/global_costmap/always_send_full_costmap: True
* /rosbot1/move_base_rosbot/global_costmap/footprint: [[0.12, 0.14], [0...
* /rosbot1/move_base_rosbot/global_costmap/global_frame: map
* /rosbot1/move_base_rosbot/global_costmap/height: 25
* /rosbot1/move_base_rosbot/global_costmap/inflation_radius: 2.5
* /rosbot1/move_base_rosbot/global_costmap/laser_scan_sensor/clearing: True
* /rosbot1/move_base_rosbot/global_costmap/laser_scan_sensor/data_type: LaserScan
* /rosbot1/move_base_rosbot/global_costmap/laser_scan_sensor/marking: True
* /rosbot1/move_base_rosbot/global_costmap/laser_scan_sensor/sensor_frame: rosbot1/laser
* /rosbot1/move_base_rosbot/global_costmap/laser_scan_sensor/topic: /rosbot1/scan
* /rosbot1/move_base_rosbot/global_costmap/map_topic: map
* /rosbot1/move_base_rosbot/global_costmap/observation_sources: laser_scan_sensor
* /rosbot1/move_base_rosbot/global_costmap/publish_frequency: 0.5
* /rosbot1/move_base_rosbot/global_costmap/raytrace_range: 8.5
* /rosbot1/move_base_rosbot/global_costmap/resolution: 0.01
* /rosbot1/move_base_rosbot/global_costmap/robot_base_frame: rosbot1/base_link
* /rosbot1/move_base_rosbot/global_costmap/rolling_window: True
* /rosbot1/move_base_rosbot/global_costmap/static_map: True
* /rosbot1/move_base_rosbot/global_costmap/subscribe_to_updates: True
* /rosbot1/move_base_rosbot/global_costmap/transform_tolerance: 0.8
* /rosbot1/move_base_rosbot/global_costmap/update_frequency: 0.5
* /rosbot1/move_base_rosbot/global_costmap/width: 50
* /rosbot1/move_base_rosbot/local_costmap/\obstacle_range: 6.0
* /rosbot1/move_base_rosbot/local_costmap/always_send_full_costmap: True
* /rosbot1/move_base_rosbot/local_costmap/footprint: [[0.12, 0.14], [0...
* /rosbot1/move_base_rosbot/local_costmap/global_frame: rosbot1/odom
* /rosbot1/move_base_rosbot/local_costmap/height: 3
* /rosbot1/move_base_rosbot/local_costmap/inflation_radius: 1.0
* /rosbot1/move_base_rosbot/local_costmap/laser_scan_sensor/clearing: True
* /rosbot1/move_base_rosbot/local_costmap/laser_scan_sensor/data_type: LaserScan
* /rosbot1/move_base_rosbot/local_costmap/laser_scan_sensor/marking: True
* /rosbot1/move_base_rosbot/local_costmap/laser_scan_sensor/sensor_frame: rosbot1/laser
* /rosbot1/move_base_rosbot/local_costmap/laser_scan_sensor/topic: /rosbot1/scan
* /rosbot1/move_base_rosbot/local_costmap/map_topic: map
* /rosbot1/move_base_rosbot/local_costmap/observation_sources: laser_scan_sensor
* /rosbot1/move_base_rosbot/local_costmap/origin_x: -1.5
* /rosbot1/move_base_rosbot/local_costmap/origin_y: -1.5
* /rosbot1/move_base_rosbot/local_costmap/publish_frequency: 5
* /rosbot1/move_base_rosbot/local_costmap/raytrace_range: 8.5
* /rosbot1/move_base_rosbot/local_costmap/resolution: 0.01
* /rosbot1/move_base_rosbot/local_costmap/robot_base_frame: rosbot1/base_link
* /rosbot1/move_base_rosbot/local_costmap/rolling_window: True
* /rosbot1/move_base_rosbot/local_costmap/static_map: True
* /rosbot1/move_base_rosbot/local_costmap/subscribe_to_updates: True
* /rosbot1/move_base_rosbot/local_costmap/transform_tolerance: 0.25
* /rosbot1/move_base_rosbot/local_costmap/update_frequency: 5
* /rosbot1/move_base_rosbot/local_costmap/width: 3
* /rosbot1/rosbot_ekf/acceleration_gains: [0.8, 0.0, 0.0, 0...
* /rosbot1/rosbot_ekf/acceleration_limits: [1.3, 0.0, 0.0, 0...
* /rosbot1/rosbot_ekf/base_link_frame: rosbot1/base_link
* /rosbot1/rosbot_ekf/control_config: [True, False, Fal...
* /rosbot1/rosbot_ekf/control_timeout: 0.2
* /rosbot1/rosbot_ekf/debug: False
* /rosbot1/rosbot_ekf/debug_out_file: /path/to/debug/fi...
* /rosbot1/rosbot_ekf/deceleration_gains: [1.0, 0.0, 0.0, 0...
* /rosbot1/rosbot_ekf/deceleration_limits: [1.3, 0.0, 0.0, 0...
* /rosbot1/rosbot_ekf/frequency: 20
* /rosbot1/rosbot_ekf/imu0: imu
* /rosbot1/rosbot_ekf/imu0_config: [False, False, Fa...
* /rosbot1/rosbot_ekf/imu0_differential: True
* /rosbot1/rosbot_ekf/imu0_linear_acceleration_rejection_threshold: 0.8
* /rosbot1/rosbot_ekf/imu0_nodelay: False
* /rosbot1/rosbot_ekf/imu0_pose_rejection_threshold: 0.8
* /rosbot1/rosbot_ekf/imu0_queue_size: 4
* /rosbot1/rosbot_ekf/imu0_relative: True
* /rosbot1/rosbot_ekf/imu0_remove_gravitational_acceleration: True
* /rosbot1/rosbot_ekf/imu0_twist_rejection_threshold: 0.8
* /rosbot1/rosbot_ekf/initial_estimate_covariance: ['1e-9', 0, 0, 0,...
* /rosbot1/rosbot_ekf/map_frame: map
* /rosbot1/rosbot_ekf/odom0: odom/wheel
* /rosbot1/rosbot_ekf/odom0_config: [True, True, True...
* /rosbot1/rosbot_ekf/odom0_differential: False
* /rosbot1/rosbot_ekf/odom0_nodelay: False
* /rosbot1/rosbot_ekf/odom0_queue_size: 6
* /rosbot1/rosbot_ekf/odom0_relative: True
* /rosbot1/rosbot_ekf/odom_frame: rosbot1/odom
* /rosbot1/rosbot_ekf/print_diagnostics: True
* /rosbot1/rosbot_ekf/process_noise_covariance: [0.05, 0, 0, 0, 0...
* /rosbot1/rosbot_ekf/publish_acceleration: False
* /rosbot1/rosbot_ekf/publish_tf: True
* /rosbot1/rosbot_ekf/sensor_timeout: 0.2
* /rosbot1/rosbot_ekf/stamped_control: False
* /rosbot1/rosbot_ekf/transform_time_offset: 0.0
* /rosbot1/rosbot_ekf/transform_timeout: 0.1
* /rosbot1/rosbot_ekf/two_d_mode: False
* /rosbot1/rosbot_ekf/use_control: True
* /rosbot1/rosbot_ekf/world_frame: rosbot1/odom
* /rosbot1/rplidar/angle_compensate: True
* /rosbot1/rplidar/frame_id: rosbot1/laser
* /rosbot1/rplidar/inverted: False
* /rosbot1/rplidar/scan_mode: Sensitivity
* /rosbot1/rplidar/serial_baudrate: 256000
* /rosbot1/rplidar/serial_port: /dev/ttyUSB0
* /rosbot1/rplidar/tf_prefix: rosbot1
* /rosbot1/serial_node/baud: 525000
* /rosbot1/serial_node/port: /dev/ttyS4
* /rosdistro: melodic
* /rosversion: 1.14.10
NODES
/rosbot1/
amcl (amcl/amcl)
imu_publisher (tf/static_transform_publisher)
laser_broadcaster (tf/static_transform_publisher)
move_base_rosbot (move_base/move_base)
msgs_conversion (rosbot_ekf/msgs_conversion)
rosbot_ekf (robot_localization/ekf_localization_node)
rplidar (rplidar_ros/rplidarNode)
serial_node (rosserial_python/serial_node.py)
ROS_MASTER_URI=http://192.168.124.39:11311
process[rosbot1/rplidar-1]: started with pid [10879]
process[rosbot1/serial_node-2]: started with pid [10882]
process[rosbot1/msgs_conversion-3]: started with pid [10883]
process[rosbot1/rosbot_ekf-4]: started with pid [10888]
process[rosbot1/imu_publisher-5]: started with pid [10900]
[ INFO] [1650255754.809868973]: RPLIDAR running on ROS package rplidar_ros. SDK Version:1.12.0
process[rosbot1/laser_broadcaster-6]: started with pid [10908]
process[rosbot1/amcl-7]: started with pid [10915]
process[rosbot1/move_base_rosbot-8]: started with pid [10926]
RPLIDAR S/N: AFED9A87C5E392D2A5E492F83F38316C
[ INFO] [1650255755.348432207]: Firmware Ver: 1.27
[ INFO] [1650255755.348571525]: Hardware Rev: 6
[ INFO] [1650255755.349932589]: RPLidar health status : 0
[ WARN] [1650255755.618295037]: Both imu0_differential and imu0_relative were set to true. Using differential mode.
[ WARN] [1650255755.819247572]: ignoring NAN in initial pose Yaw
[ INFO] [1650255755.988264048]: current scan mode: Sensitivity, max_distance: 25.0 m, Point number: 15.9K , angle_compensate: 4
[ INFO] [1650255756.100860757]: Subscribed to map topic.
[INFO] [1650255756.496538]: ROS Serial Python Node
[INFO] [1650255756.546231]: Connecting to /dev/ttyS4 at 525000 baud
[ INFO] [1650255756.831424295]: Received a 928 X 1088 map @ 0.050 m/pix
[ WARN] [1650255756.914755615]: ignoring NAN in initial pose Yaw
[ INFO] [1650255756.943944545]: Initializing likelihood field model; this can take some time on large maps...
[ INFO] [1650255757.274465039]: Done initializing likelihood field model.
[INFO] [1650255758.669757]: Requesting topics...
[INFO] [1650255758.748144]: Note: publish buffer size is 512 bytes
[INFO] [1650255758.765827]: Setup service server on config [rosbot_ekf/Configuration]
[INFO] [1650255759.135813]: Setup publisher on battery [sensor_msgs/BatteryState]
[INFO] [1650255759.152471]: Setup publisher on pose [geometry_msgs/PoseStamped]
[INFO] [1650255759.175869]: Setup publisher on velocity [geometry_msgs/Twist]
[INFO] [1650255759.192930]: Setup publisher on range/fr [sensor_msgs/Range]
[INFO] [1650255759.214848]: Setup publisher on range/fl [sensor_msgs/Range]
[INFO] [1650255759.239031]: Setup publisher on range/rr [sensor_msgs/Range]
[INFO] [1650255759.257957]: Setup publisher on range/rl [sensor_msgs/Range]
[INFO] [1650255759.277333]: Setup publisher on joint_states [sensor_msgs/JointState]
[INFO] [1650255759.298208]: Setup publisher on imu [sensor_msgs/Imu]
[INFO] [1650255759.316790]: Setup publisher on buttons [std_msgs/UInt8]
[INFO] [1650255759.333055]: Note: subscribe buffer size is 512 bytes
[INFO] [1650255759.360875]: Setup subscriber on cmd_vel [geometry_msgs/Twist]
[INFO] [1650255759.394771]: Setup subscriber on cmd_ser [std_msgs/UInt32]
[INFO] [1650255759.412748]:
______ _____ _____ _ _ __
| ___ \| _ |/ ___|| | | | / _|
| |_/ /| | | |\ `--. | |__ ___ | |_ | |_ __ __
| / | | | | `--. \| '_ \ / _ \ | __| | _|\ \ /\ / /
| |\ \ \ \_/ //\__/ /| |_) || (_) || |_ | | \ V V /
\_| \_| \___/ \____/ |_.__/ \___/ \__| |_| \_/\_/
Firmware version: 0.15.0
[INFO] [1650255759.426611]: Detected sensor: MPU9250
[ WARN] [1650255759.606458809]: Could not obtain transform from odom to rosbot1/odom. Error was "rosbot1/odom" passed to lookupTransform argument target_frame does not exist.
[ WARN] [1650255759.909699457]: Failed to meet update rate! Took 0.43497811900000005192
[ WARN] [1650255760.866639925]: Timed out waiting for transform from rosbot1/base_link to map to become available before running costmap, tf error: canTransform: target_frame map does not exist.. canTransform returned after 0.100478 timeout was 0.1.
[ WARN] [1650255761.319715855]: Failed to meet update rate! Took 1.7950355270000000196
[ WARN] [1650255761.620788644]: Could not obtain transform from odom to rosbot1/odom. Error was "rosbot1/odom" passed to lookupTransform argument target_frame does not exist.
[ WARN] [1650255762.731702447]: Failed to meet update rate! Took 2.8215937489999998178
[ WARN] [1650255763.638687238]: Could not obtain transform from odom to rosbot1/odom. Error was "rosbot1/odom" passed to lookupTransform argument target_frame does not exist.
[ WARN] [1650255764.141879649]: Failed to meet update rate! Took 2.8218772969999998956
[ WARN] [1650255765.552532613]: Failed to meet update rate! Took 2.8204987710000000156
[ WARN] [1650255765.656814882]: Could not obtain transform from imu_link to rosbot1/base_link. Error was "imu_link" passed to lookupTransform argument source_frame does not exist.
[ WARN] [1650255766.086621613]: Timed out waiting for transform from rosbot1/base_link to map to become available before running costmap, tf error: canTransform: target_frame map does not exist.. canTransform returned after 0.100278 timeout was 0.1.
[ WARN] [1650255766.968142860]: Failed to meet update rate! Took 2.8255107139999999788
[ WARN] [1650255767.673467580]: Could not obtain transform from imu_link to rosbot1/base_link. Error was "imu_link" passed to lookupTransform argument source_frame does not exist.
[ WARN] [1650255768.382409630]: Failed to meet update rate! Took 2.8289551409999997844
[ WARN] [1650255769.692750812]: Could not obtain transform from odom to rosbot1/odom. Error was "rosbot1/odom" passed to lookupTransform argument target_frame does not exist.
[ WARN] [1650255769.794436571]: Failed to meet update rate! Took 2.8259684900000001662
[ WARN] [1650255771.116364279]: Timed out waiting for transform from rosbot1/base_link to map to become available before running costmap, tf error: canTransform: target_frame map does not exist.. canTransform returned after 0.100621 timeout was 0.1.
[ WARN] [1650255771.207169673]: Failed to meet update rate! Took 2.8243827750000001231
[ WARN] [1650255771.711851966]: Could not obtain transform from imu_link to rosbot1/base_link. Error was "imu_link" passed to lookupTransform argument source_frame does not exist.
[ WARN] [1650255771.829168697]: No laser scan received (and thus no pose updates have been published) for 1650255771.828678 seconds. Verify that data is being published on the /rosbot1/scan topic.
[ WARN] [1650255772.620389712]: Failed to meet update rate! Took 2.8256591189999999969
[ WARN] [1650255773.727930259]: Could not obtain transform from imu_link to rosbot1/base_link. Error was "imu_link" passed to lookupTransform argument source_frame does not exist.
[ WARN] [1650255774.030590288]: Failed to meet update rate! Took 2.8230959690000001494
^C[rosbot1/amcl-7] killing on exit
[rosbot1/move_base_rosbot-8] killing on exit
[rosbot1/laser_broadcaster-6] killing on exit
[rosbot1/rosbot_ekf-4] killing on exit
[rosbot1/msgs_conversion-3] killing on exit
[rosbot1/imu_publisher-5] killing on exit
[rosbot1/serial_node-2] killing on exit
[rosbot1/rplidar-1] killing on exit
[INFO] [1650255775.177396]: Send tx stop request
shutting down processing monitor...
... shutting down processing monitor complete
done
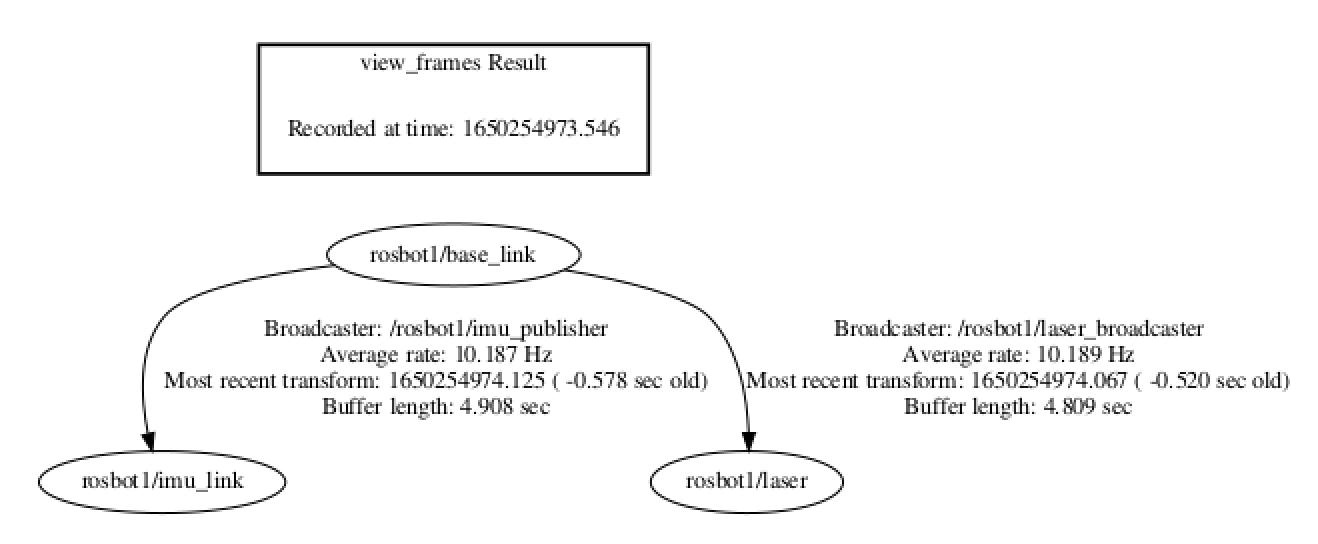
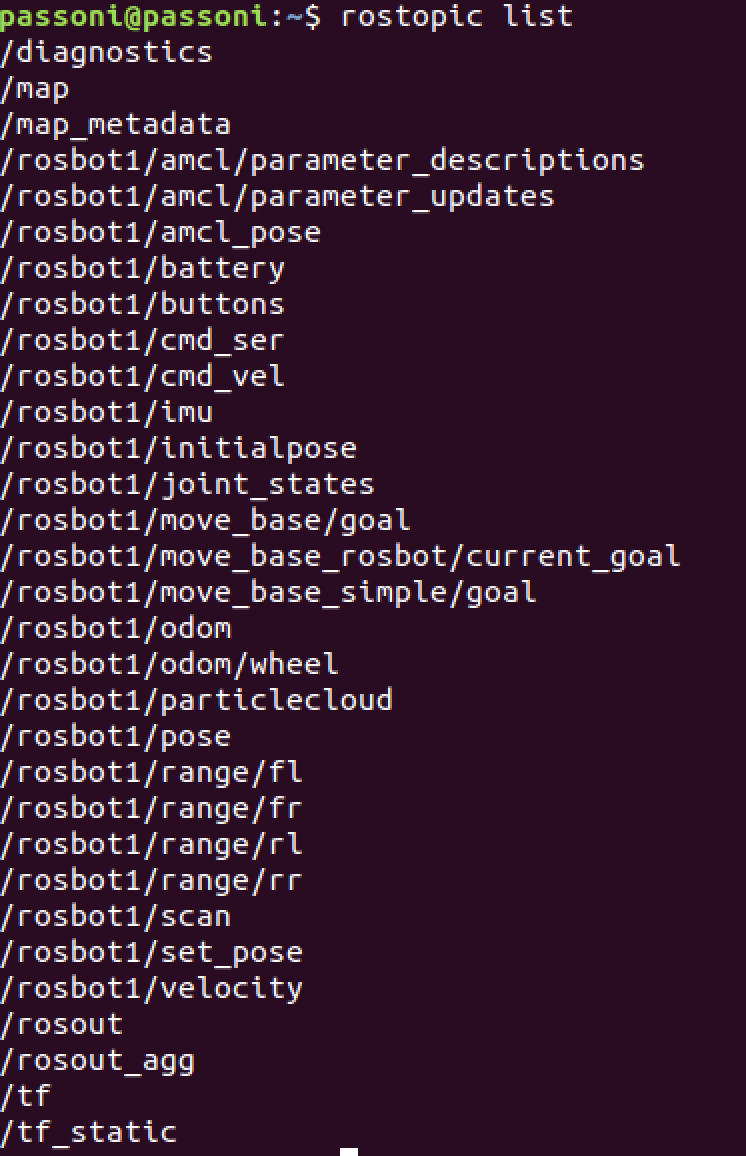
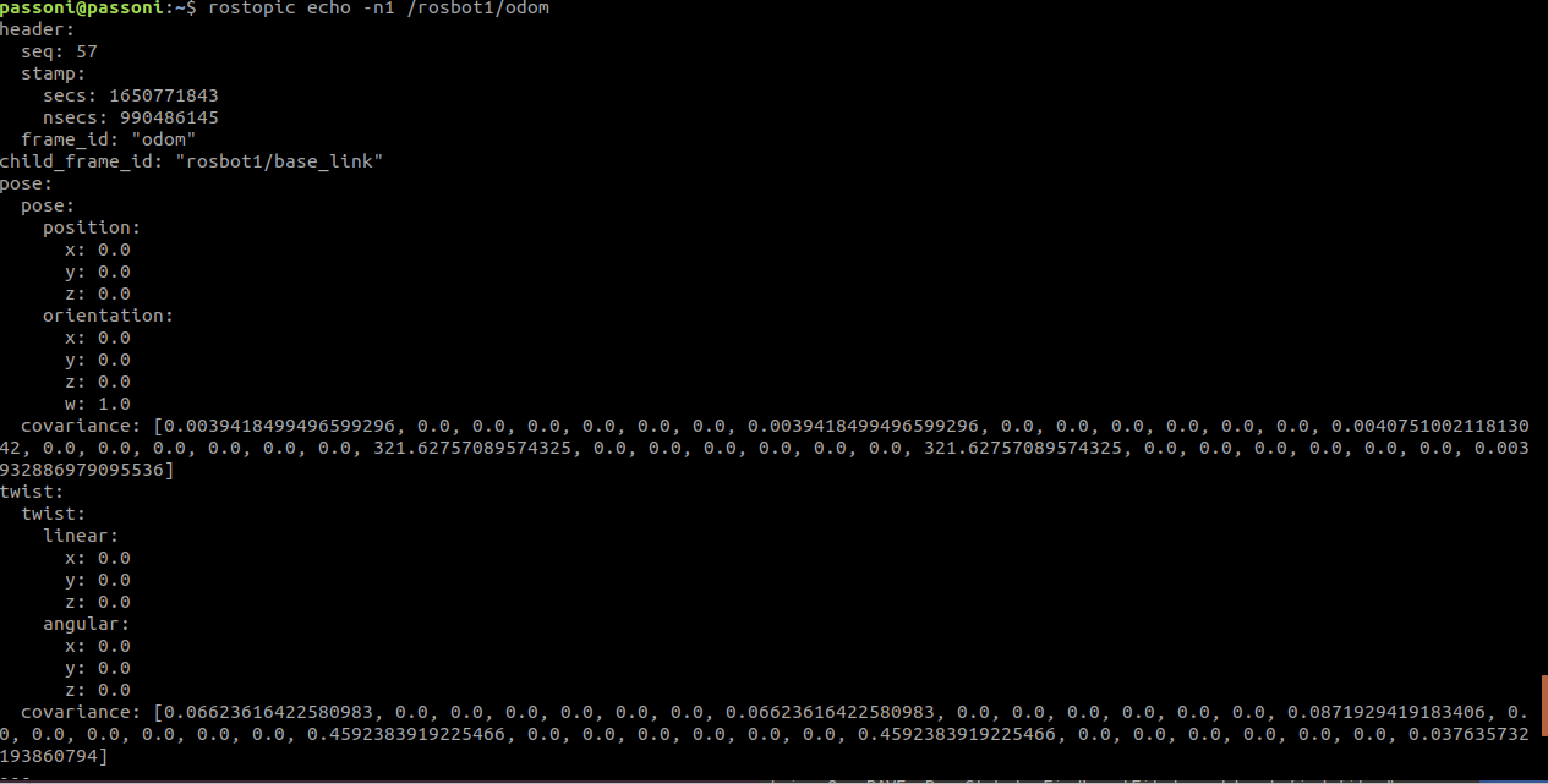
And I can not have map and rosbot1/odom correctly appeared in the TF tree, Here are my TF tree and all topics,
no response to rostopic echo -n1 /rosbot1/odom or rostopic echo -n1 /odom
only rosbot1/base_link, rosbot1/laser and rosbot1/imu_link appeared in TF tree, here is the resutls after rosrun tf tf_echo rosbot1/odom rosbot1/base_link:
[ WARN] [1650773660.660316260]: Could not obtain transform from imu_link to rosbot1/base_link. Error was "imu_link" passed to lookupTransform argument source_frame does not exist.
[ WARN] [1650773660.964193215]: Failed to meet update rate! Took 0.41670220000000002258
[ WARN] [1650773661.773607929]: Failed to meet update rate! Took 1.1761404740000001024
[ WARN] [1650773661.967833834]: Timed out waiting for transform from rosbot1/base_link to map to become available before running costmap, tf error: canTransform: target_frame map does not exist.. canTransform returned after 0.101034 timeout was 0.1.
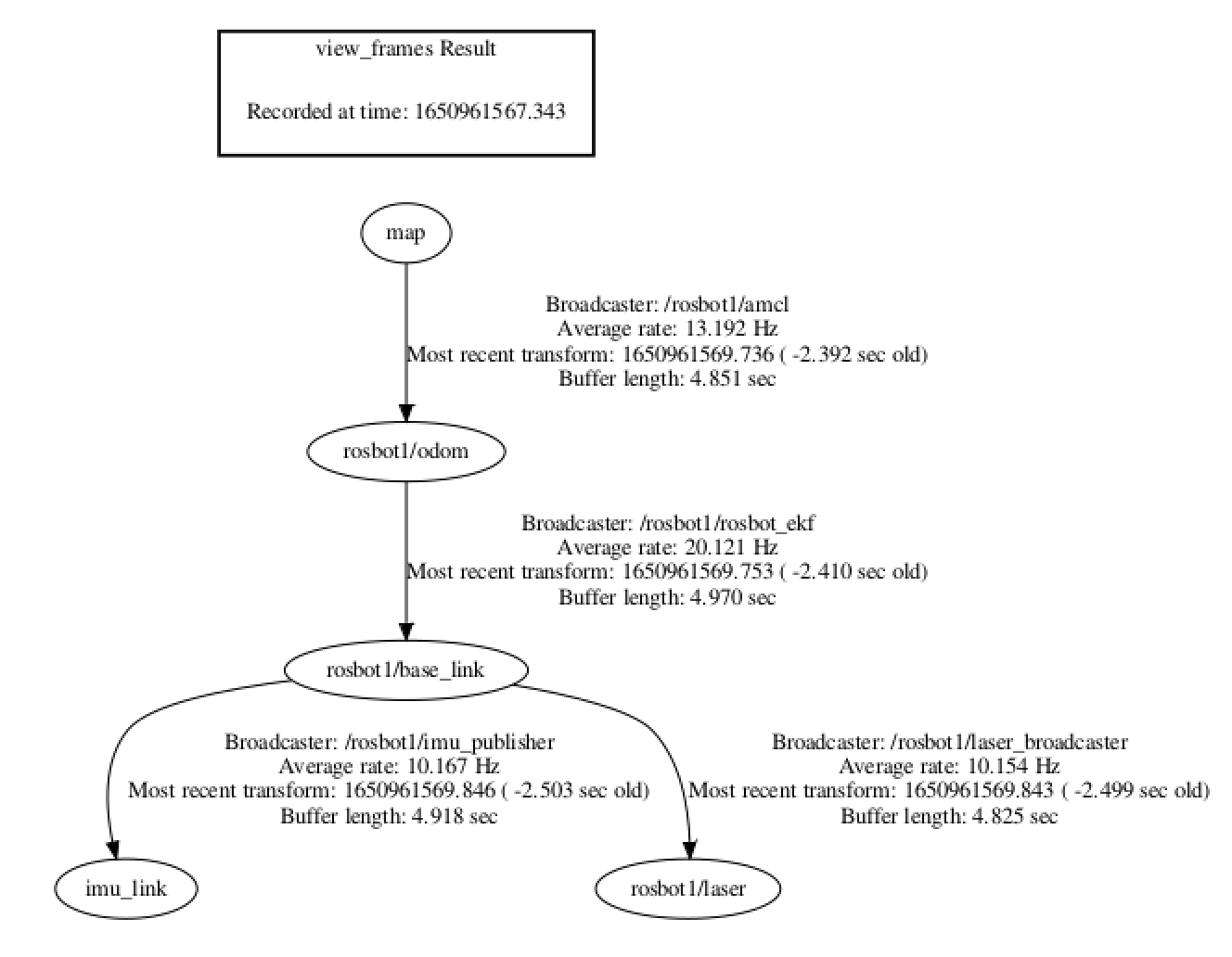
In the TF tree, frame id map, and rosbot1/odom still appear correctly! I am wondering if it is right to build the correct TF tree by changing frame id imu_link to rosbot1/imu_link, and changing frame id odom to rosbot1/odom. If it is, could you please guide me hwo to do it?
Hi Si,
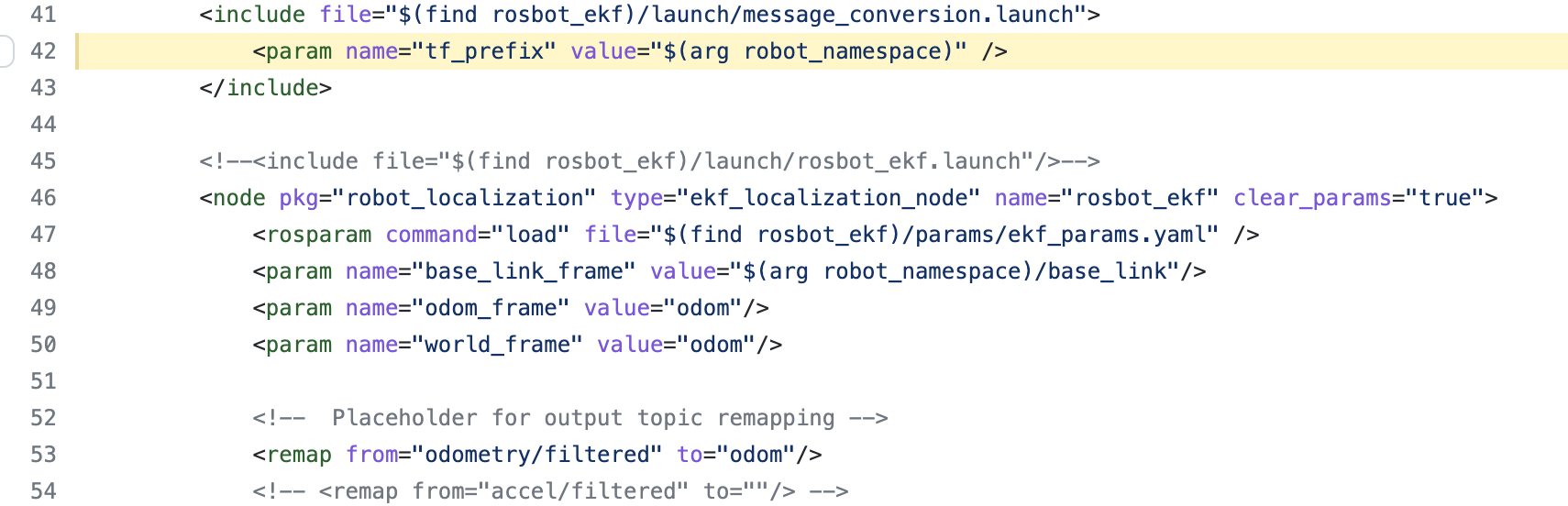
A major problem is launching a message_conversion.launch. Your argument is passed to launch, but not to the msgs_conversion node. You can run it by changing lines 41-43 to:
I changed $(arg robot_namespace)/imu_link to imu_link in line 56. Unfortunately, there is no out-of-the-box tool that allows you to change frame_id in /rosbot1/imu topic to one that includes namespace. I think this solution should work, but if not, you can extend the functionality of the msgs_conversion node from rosbot_ekf package by adding support for messages from /imu topic (exactly the same as it is with odom msgs).
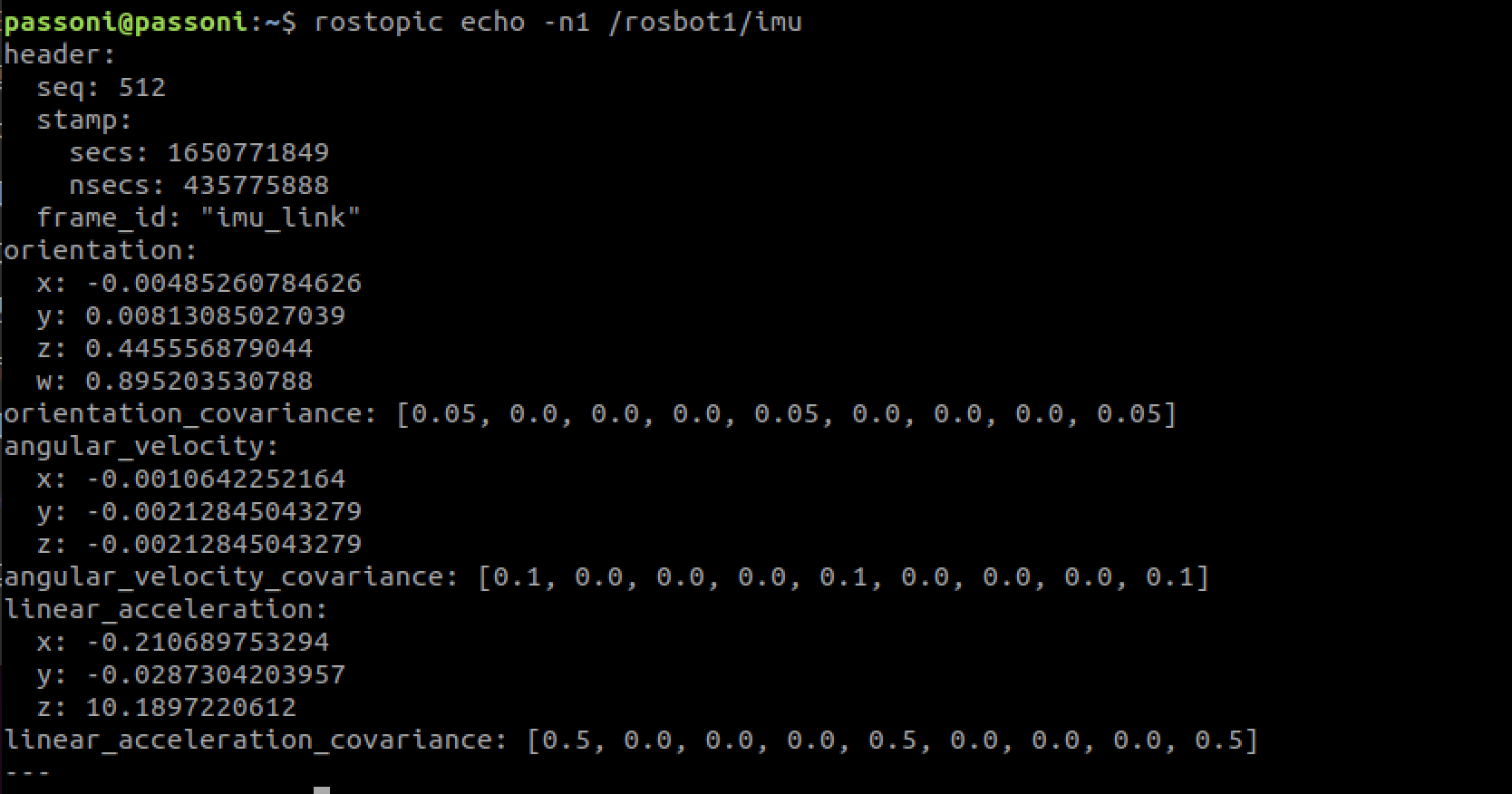
I am wondering if I can add namespace rosbot1 into the frame_id of /imu message by modifying msgs_conversion.cpp as post Odometry/Rosbot_ekf not working under namespace suggested to convert /imu message,
adding function mpuCallback to convert the frame id
adding new publisher for imu
if yes, could you tell me where I can include file rosbot_ekf/Imu.h and sensor_msgs/Imu.h to remake rosbot_ekf package?
Thanks a lot for your help! With you guidance, I succesffly rebult rosbot_ekf package with modified msgs_conversion.cpp.
But after I launched my scripts (without any change in my launch script start_namesapce.launch), the TF tree is still like the one in previous, the frame_id of /imu message is still imu_link, not rosbot1/imu_link.
I tried to change imu_link to $(arg robot_namespace)/imu_link in line 56 of my launch script start_namesapce.launch. After launch, the frameid of ‘imu_link’ changed to rosbot1/imu_link, but I also recived warning [ WARN] [1652329945.327612312]: Could not obtain transform from imu_link to rosbot1/base_link. Error was "imu_link" passed to lookupTransform argument source_frame does not exist.
Could you please tell me why and how to fix it? Thanks in advance!
BTW, I am not sure if this way works for multiple rosbot robots running at the same time, like “rosbot1”, “rosbot2”, because they all subscribed same topics “pose” and “mpu9250” in the msgs_conversion.cpp!
Hi,
I’m afraid that your callback function can never be called. It’s becouse mpu9250 data is published on the imu topic (since a few months). Also check if you should subscribe to a topic whose name contains namespace rosbot1. After solving this problem, make sure the frame_id in this topic is rosbot1/imu
Please, let me know about it. If you have any questions/troubles, do not hesitate to ask.
I tried to change the subscribed topic mpu9250 to imu, after remake and launch, I got the following errors, and the frameid of topic /rosbot/imu was still imu_link
[ERROR] [1652755264.857741940]: md5sum mismatch making local subscription to topic /rosbot1/imu.
[ERROR] [1652755264.870051328]: Subscriber expects type rosbot_ekf/Imu, md5sum 3d83bdcabfe2927ed38c36f102a9f646
[ERROR] [1652755264.870639655]: Publisher provides type sensor_msgs/Imu, md5sum 6a62c6daae103f4ff57a132d6f95cec2
[ WARN] [1652755264.871127061]: couldn't register subscriber on topic [/rosbot1/imu]
I also tried to add namessapce rosbot1 before the subscribed topics pose and imu in msgs_conversion.cpp, errors kept the same.
Could you please help again to check it? Thanks in advance!
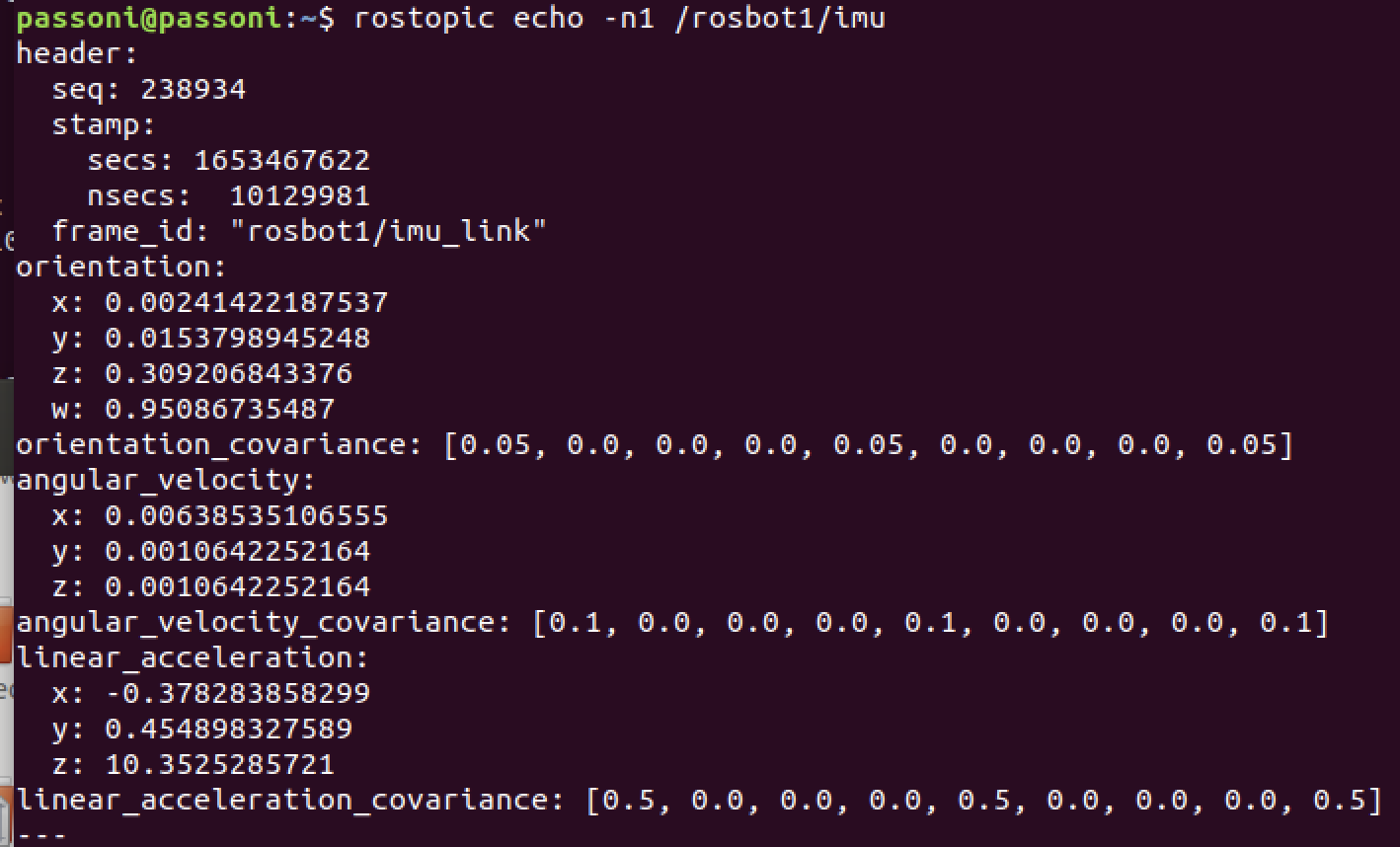
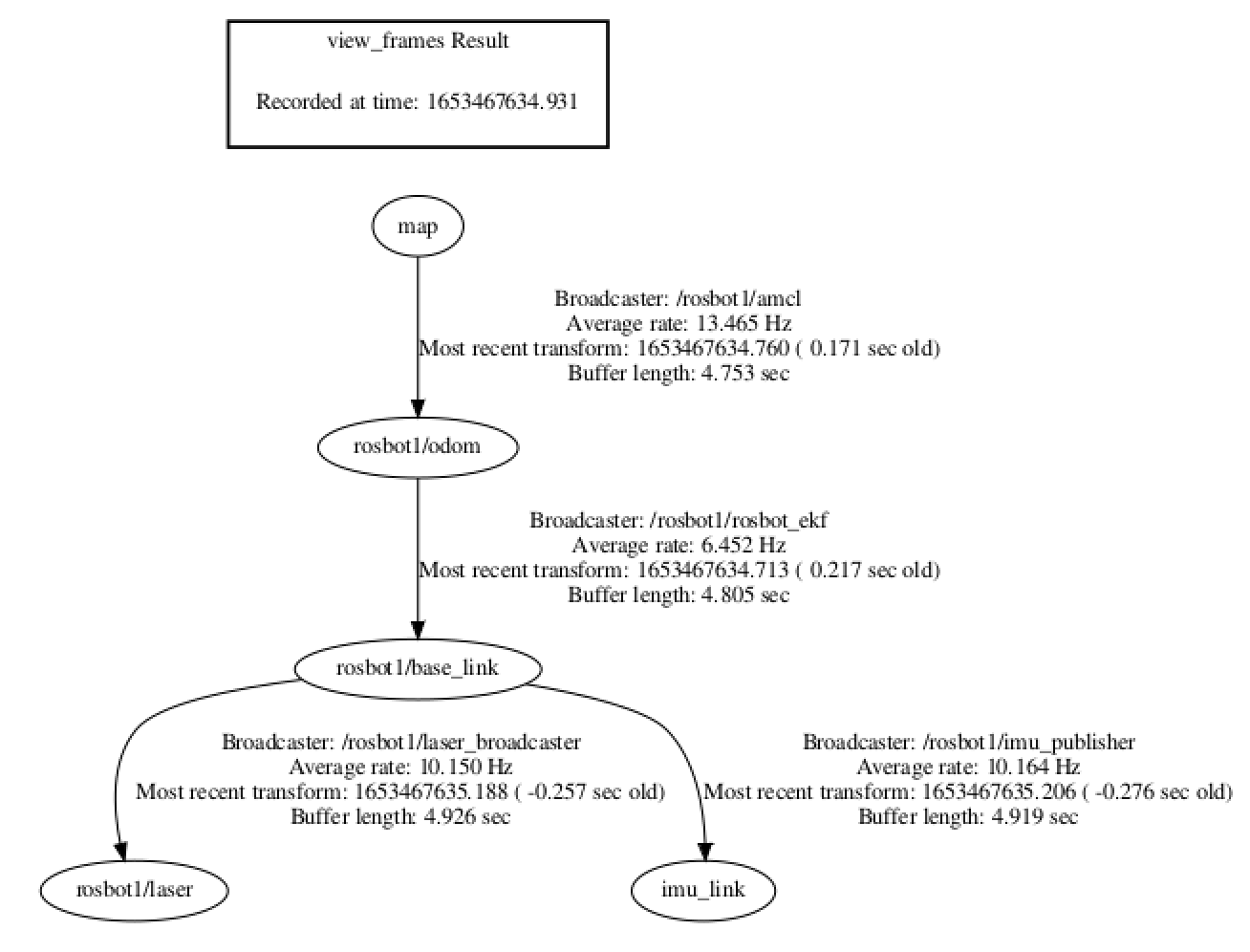
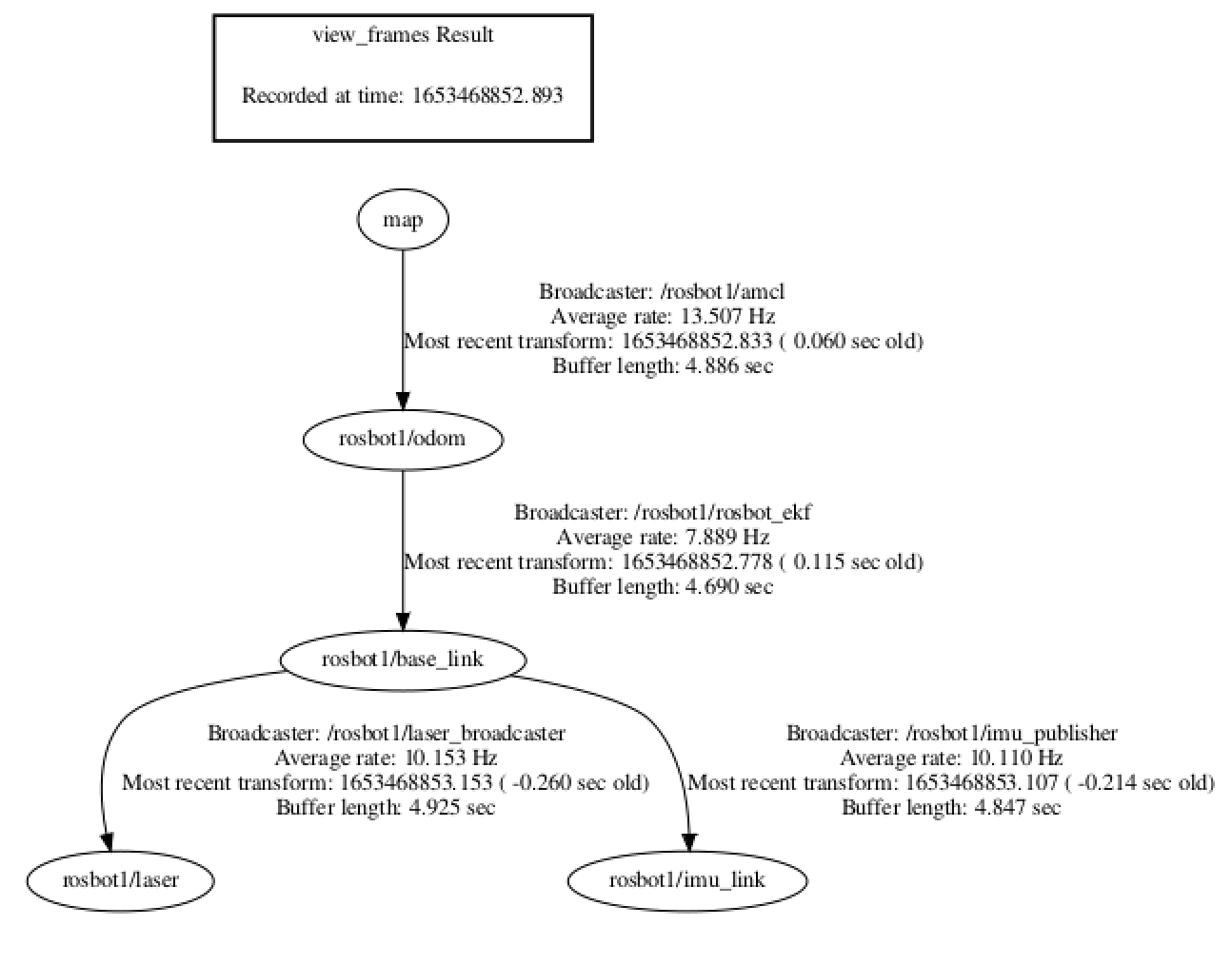
After modified the msgs_conversion.cpp, I successfully added frame_id rosbot1 into topic /rosbot1/imu. But I still have some problems in launching the robot and building the TF tree.
trial 1
If I keep the static transform from base_link to imu_link like:
[ WARN] [1653468352.296138188]: Could not obtain transform from rosbot1/imu_link to rosbot1/base_link. Error was "rosbot1/imu_link" passed to lookupTransform argument source_frame does not exist.
[ WARN] [1653468827.681125155]: Could not obtain transform from imu_link to rosbot1/base_link. Error was "imu_link" passed to lookupTransform argument source_frame does not exist.
the topic /rosbot1/imu will be the same (with frame_id rosbot1/imu_link in the header)
Hi,
My initial guess is that the rosbot1/imu topic contains messages with both the rosbot1/imu and imu frames. Please try to change publisher topic in your msgs_conversion node from imu to i.e. imu_conversion. Next, try to change imu topic in your launch:
warnings in the follwoing will keep popping out after odom received! when I launch:
[ WARN] [1654761096.540290903]: Costmap2DROS transform timeout. Current time: 1654761096.5401, global_pose stamp: 1654761094.6967, tolerance: 0.8000
[ WARN] [1654761096.540468682]: Could not get robot pose, cancelling reconfiguration
After I send target position to the robot by actionlib.SimpleActionClient and MoveBaseGoal after init it position, it will pop out errors and warnings like:
[ERROR] [1654761965.617714978]: Couldn't determine robot's pose associated with laser scan
[ WARN] [1654761965.618165939]: Failed to compute odom pose, skipping scan (Lookup would require extrapolation into the future. Requested time 1654761955.414014200 but the latest data is at time 1654761954.317594114, when looking up transform from frame [rosbot1/base_link] to frame [rosbot1/odom])
I am lost now for the params for amcl and configuratons for move_base were OK when I do the navigation before I upgraded from Kinetic to Melodic. I only removed / in the params odom_frame_id and base_frame_id of amcl module in start_namesapce.launch:
I’m afraid your question is about third-party developer solutions, which is not directly related to the problem of running ROSbot. You can ask about it at https://answers.ros.org/questions, for example.
I doubt that there are some problems with my lidar.
I found that the lidar will fail to start to rotate sometimes after I launch with my own launch file. In another trial, the lidar started to rotate, but I got error:
No laser scan received (and thus no pose updates have been published) for 1655194664.028107 seconds. Verify that data is being published on the /rosbot1/scan topic
then I went to check this topic, but no reponse to my rostipic echo /rosbot1/scan even though this topic is there.
So I did another trial, I just launched the lidar by:
roslaunch rplidar_ros rplidar_a3.launch
the lidar behaved like before, sometimes it failed to start with error: [ERROR] [1655196344.166891901]: Error, operation time out. RESULT_OPERATION_TIMEOUT!
sometimes it started with error [ERROR] [1655196152.084046637]: Can not start scan: 80008000!, here is the full logs:
Checking log directory for disk usage. This may take a while.
Press Ctrl-C to interrupt
Done checking log file disk usage. Usage is <1GB.
started roslaunch server http://192.168.28.135:33601/
SUMMARY
========
PARAMETERS
* /rosdistro: melodic
* /rosversion: 1.14.10
* /rplidarNode/angle_compensate: True
* /rplidarNode/frame_id: laser
* /rplidarNode/inverted: False
* /rplidarNode/scan_mode: Sensitivity
* /rplidarNode/serial_baudrate: 256000
* /rplidarNode/serial_port: /dev/ttyUSB0
NODES
/
rplidarNode (rplidar_ros/rplidarNode)
ROS_MASTER_URI=http://192.168.28.83:11311
process[rplidarNode-1]: started with pid [13212]
[ INFO] [1655196149.035925460]: RPLIDAR running on ROS package rplidar_ros. SDK Version:1.12.0
RPLIDAR S/N: AFED9A87C5E392D2A5E492F83F38316C
[ INFO] [1655196149.552952133]: Firmware Ver: 1.27
[ INFO] [1655196149.553066176]: Hardware Rev: 6
[ INFO] [1655196149.554194363]: RPLidar health status : 0
[ERROR] [1655196152.084046637]: Can not start scan: 80008000!
I tried to echo topic /scan when it started, but still no reponse!
I am now trying to do the map navigation with the namespace, however I got failure after I sent target position to rosbot1/move_base by actionlib by my scripts goto_m.py
here are the warning and error logs after send target positions to the robot:
[ INFO] [1657271532.004975381]: Setting pose (1657271532.004894): 0.000 0.000 -0.000
[ INFO] [1657271532.957326799]: Setting pose (1657271532.957246): 0.000 0.000 -0.000
[ WARN] [1657271537.253910877]: Map update loop missed its desired rate of 0.5000Hz... the loop actually took 5.3709 seconds
[ WARN] [1657271537.996695263]: Control loop missed its desired rate of 20.0000Hz... the loop actually took 0.1199 seconds
[ WARN] [1657271538.183488184]: Control loop missed its desired rate of 20.0000Hz... the loop actually took 0.1868 seconds
[ WARN] [1657271538.306957356]: Control loop missed its desired rate of 20.0000Hz... the loop actually took 0.1235 seconds
[ERROR] [1657271538.364497784]: Extrapolation Error: Lookup would require extrapolation into the future. Requested time 1657271538.282646894 but the latest data is at time 1657271538.267853389, when looking up transform from frame [rosbot1/odom] to frame [map]
[ERROR] [1657271538.364693355]: Global Frame: rosbot1/odom Plan Frame size 60: map
[ WARN] [1657271538.364798321]: Could not transform the global plan to the frame of the controller
[ WARN] [1657271543.264817958]: Map update loop missed its desired rate of 0.5000Hz... the loop actually took 6.0111 seconds
[ WARN] [1657271544.060753174]: Control loop missed its desired rate of 20.0000Hz... the loop actually took 0.2038 seconds
[ WARN] [1657271544.212232593]: Control loop missed its desired rate of 20.0000Hz... the loop actually took 0.1515 seconds
[ WARN] [1657271544.382020107]: Control loop missed its desired rate of 20.0000Hz... the loop actually took 0.1698 seconds
[ WARN] [1657271544.481722016]: Control loop missed its desired rate of 20.0000Hz... the loop actually took 0.0997 seconds
[ERROR] [1657271544.516467207]: Extrapolation Error: Lookup would require extrapolation into the future. Requested time 1657271544.478997946 but the latest data is at time 1657271544.457345658, when looking up transform from frame [rosbot1/odom] to frame [map]
Could you please help me to have a check? Thanks in advance!
I guess that’s an error when you don’t set use_sim_time as true before starting the launch file or when yours nodes are unsynchronized. Have you perhaps tried following these instructions?