Hi, Pkowalsk,
Thanks so much for your help and guidance!
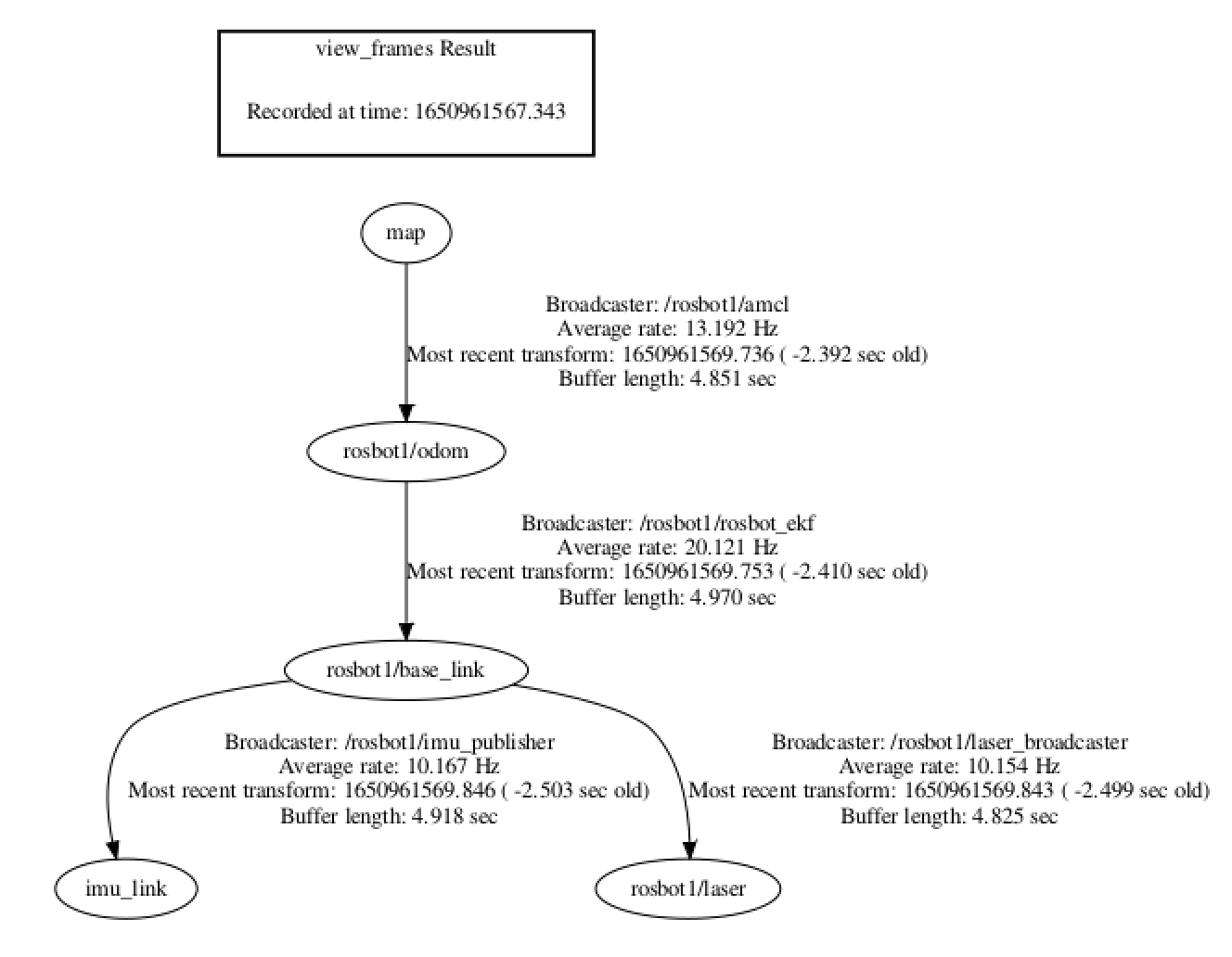
I finally see the “old” TF tree again, here are part of the logs after launch and the TF tree.
- part of logs after launch
______ _____ _____ _ _ __
| ___ \| _ |/ ___|| | | | / _|
| |_/ /| | | |\ `--. | |__ ___ | |_ | |_ __ __
| / | | | | `--. \| '_ \ / _ \ | __| | _|\ \ /\ / /
| |\ \ \ \_/ //\__/ /| |_) || (_) || |_ | | \ V V /
\_| \_| \___/ \____/ |_.__/ \___/ \__| |_| \_/\_/
Firmware version: 0.15.0
[INFO] [1650961523.155433]: Detected sensor: MPU9250
[ WARN] [1650961523.371011568]: global_costmap: Pre-Hydro parameter "static_map" unused since "plugins" is provided
[ INFO] [1650961523.388766863]: global_costmap: Using plugin "static_layer"
[ INFO] [1650961523.470220946]: Requesting the map...
[ INFO] [1650961523.894829140]: Resizing static layer to 928 X 1088 at 0.050000 m/pix
[ INFO] [1650961523.991632549]: Received a 928 X 1088 map at 0.050000 m/pix
[ INFO] [1650961524.015488314]: global_costmap: Using plugin "obstacle_layer"
[ INFO] [1650961524.079210403]: Subscribed to Topics: laser_scan_sensor
[ INFO] [1650961524.243632794]: global_costmap: Using plugin "inflation_layer"
[ WARN] [1650961524.820593817]: local_costmap: Pre-Hydro parameter "static_map" unused since "plugins" is provided
[ INFO] [1650961524.834202206]: local_costmap: Using plugin "static_layer"
[ INFO] [1650961524.913950091]: Requesting the map...
[ INFO] [1650961524.947805780]: Resizing static layer to 928 X 1088 at 0.050000 m/pix
[ INFO] [1650961525.036734449]: Received a 928 X 1088 map at 0.050000 m/pix
[ INFO] [1650961525.086324147]: local_costmap: Using plugin "obstacle_layer"
[ INFO] [1650961525.127546212]: Subscribed to Topics: laser_scan_sensor
[ INFO] [1650961525.298782345]: local_costmap: Using plugin "inflation_layer"
[ INFO] [1650961525.679597302]: Created local_planner base_local_planner/TrajectoryPlannerROS
[ INFO] [1650961525.779851238]: Sim period is set to 0.05
[ WARN] [1650961531.489246062]: Map update loop missed its desired rate of 0.5000Hz... the loop actually took 6.8925 seconds
[ INFO] [1650961531.647772919]: Recovery behavior will clear layer 'obstacles'
[ INFO] [1650961531.713864862]: Recovery behavior will clear layer 'obstacles'
[ INFO] [1650961532.021930820]: odom received!
[ WARN] [1650961537.710963948]: Map update loop missed its desired rate of 0.5000Hz... the loop actually took 6.2217 seconds
[ WARN] [1650961544.427809887]: Map update loop missed its desired rate of 0.5000Hz... the loop actually took 6.7169 seconds
[ WARN] [1650961550.811442606]: Map update loop missed its desired rate of 0.5000Hz... the loop actually took 6.3836 seconds
[ WARN] [1650961552.520012877]: Costmap2DROS transform timeout. Current time: 1650961552.5198, global_pose stamp: 1650961551.6931, tolerance: 0.8000
[ WARN] [1650961552.520198394]: Could not get robot pose, cancelling reconfiguration
- TF tree
I am wondering if I can add namespace rosbot1 into the frame_id of /imu message by modifying msgs_conversion.cpp as post Odometry/Rosbot_ekf not working under namespace suggested to convert /imu message,
- adding function
mpuCallbackto convert the frame id - adding new publisher for
imu
if yes, could you tell me where I can include file rosbot_ekf/Imu.h and sensor_msgs/Imu.h to remake rosbot_ekf package?
Thanks again!
BRs,
Si