I would like to know if it is possible to use the Ps3 controller to navigate the Rosbot around in gazebo? Using the teleop keyboard is tedious. Having a physical controller to use would be nice.
I am using Ubuntu 16.04 and Ros kinetic.
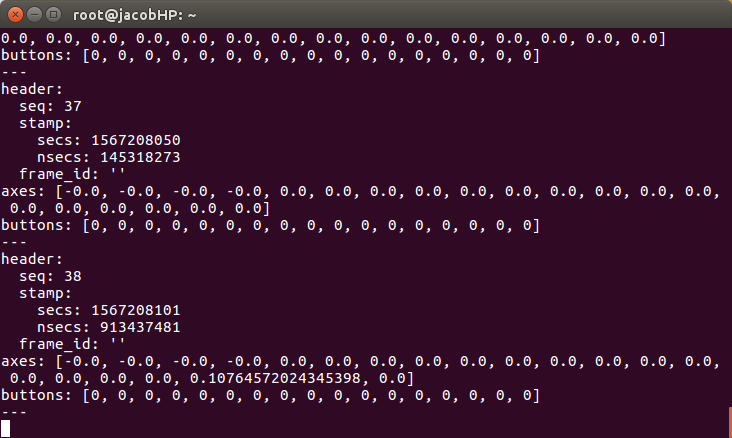
So far I have installed the drivers. I am getting the controller to publish data but currently it seems to just replace the mouse instead of moving the Rosbot around.
In my ~/ros_workspace/src/rosbot_description/src/rosbot_navigation folder I have made the ps3.launch
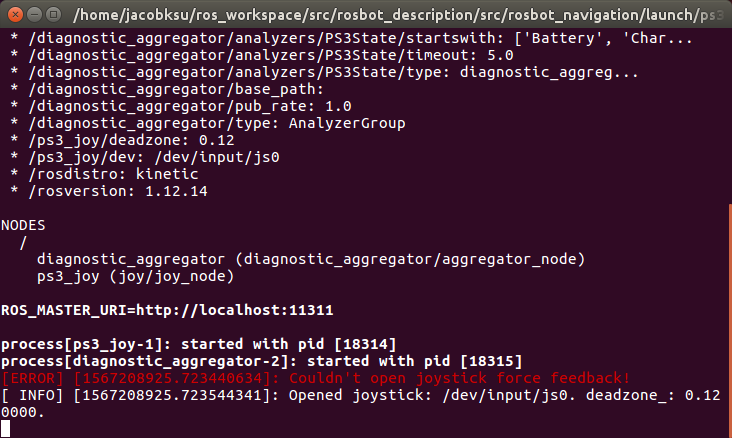
I am using the command: roslaunch rosbot_navigation ps3.launch
The ps3.launch file which reads
This last picture is after running roslaunch rosbot_navigation ps3.launch
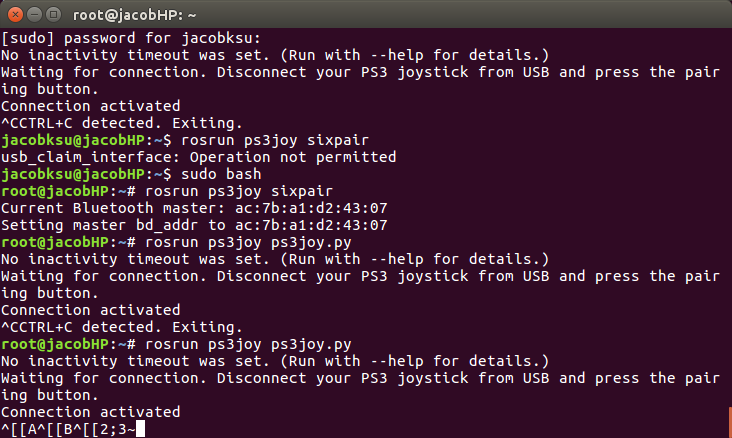
I followed these to install the necessary components to get the Ps3 controller to work with ubuntu.
sudo apt-get install ros-kinetic-joystick-drivers
OKAY! I finally got the ROSbot to move in gazebo! the only problem is I have to click down on the ps3’s joystick to make the ROSbot move, and it also moves the map around at the same time. Makes it very hard to get any work done. But the ROSbot finally moves.
Is it possible to only move the joystick and not have to click it at the same time to make the ROSbot move? Thank you for all your help so far!
Ah. Okay. I did not vary they file, but I will try changing the button values. It may help.
Thanks again
So basically the enable button value is selecting one of these buttons from the ps3 controller?
And the chosen button needs to be pressed in order for the velocity command to be sent out?
EDIT: SO I have figure out that the enable button does enables the ROSbot to move. However, it only moves forward and left. Large counter clockwise circles. and I cannot make it turn at all.
Hi,
My bad. I should have check before posting the replay. The enable_button parameter seems to select button which enables robot’s movement. It looks like you cannot disable it, but you can select a better button. Please check the default launch file for teleop_twist_joy package. You can access it by typing: