Hi Husarion team,
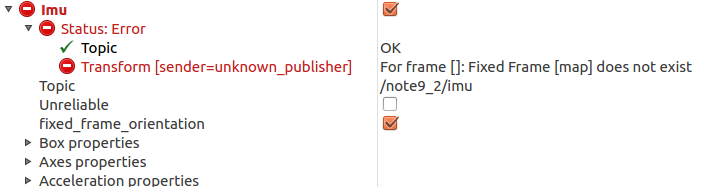
I’ve established connection with my Android device with my Ubuntu through hNode app, and now I’m trying to visualize my Android device’s IMU data in RVIZ but when selecting the IMU topic in the IMU panel, an error message is displayed as follows:
Transform [sender=unknown_publisher] , For frame : Fixed Frame [map] does not exist
screenshot:
In the terminal where I launched RVIZ, the following message appears:
[ WARN] [1547428718.319666429]: Invalid argument passed to canTransform argument source_frame in tf2 frame_ids cannot be empty
I’m assuming this is because the ‘frame_id’ variable is undefined for IMU data, as it can be seen with the command ‘rostopic echo [Android device’s IMU topic]’ in the terminal.
Is there any way to fix or work around this problem? I’m trying to sync the IMU data to RVIZ.
I’m new to the ROS space so I’m in the dark here.
Thanks for your help.