My Rosbot 2.0 Pro was working OK but has suddenly failed to run the webui demo.
When starting it gets stuck with the messages:
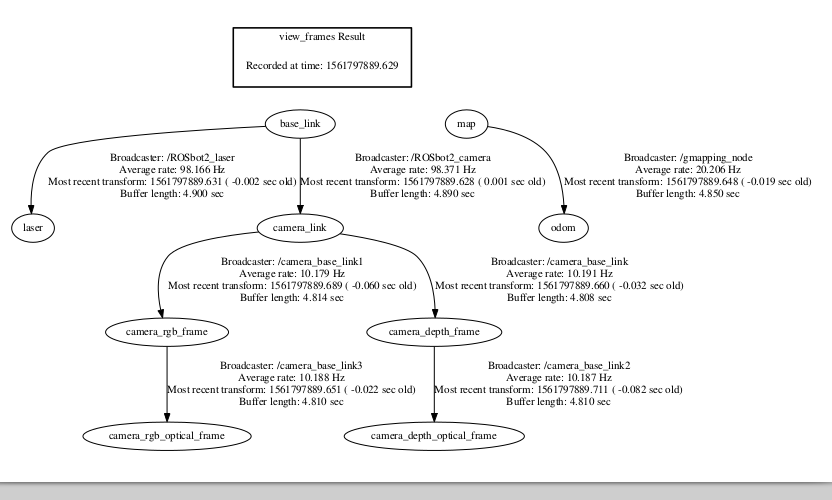
[ WARN] [1561787203.473128425]: Could not get transform between ‘/map’ and ‘/base_link’, will retry every second
[ WARN] [1561787204.473523964]: Could not get transform between ‘/map’ and ‘/base_link’, will retry every second
[ WARN] [1561787205.473912928]: Could not get transform between ‘/map’ and ‘/base_link’, will retry every second
[ WARN] [1561787206.101752659]: Timed out waiting for transform from base_link to map to become available before running costmap, tf error: Could not find a connection between ‘map’ and ‘base_link’ because they are not part of the same tree.Tf has two or more unconnected trees… canTransform returned after 0.100472 timeout was 0.1.
[ WARN] [1561787206.246949917]: Timed out waiting for transform from base_link to map to become available before running costmap, tf error: Could not find a connection between ‘map’ and ‘base_link’ because they are not part of the same tree.Tf has two or more unconnected trees… canTransform returned after 0.100291 timeout was 0.1.
[ WARN] [1561787206.474313539]: Could not get transform between ‘/map’ and ‘/base_link’, will retry every second
[ WARN] [1561787207.474960581]: Could not get transform between ‘/map’ and ‘/base_link’, will retry every second
The only thing I have changed since it was working fine is:
Increased the width and height in the global_costmap_params - which I have changed back with no impact.
and some tests in index.html in the edit folder to try and add some of my own, new functionality. (A new button) but I have also taken that out again.
Neither of these would appear to impact the mapping I would think. I can’t see what else could have changed to break it?
Any clues?
Thanks.