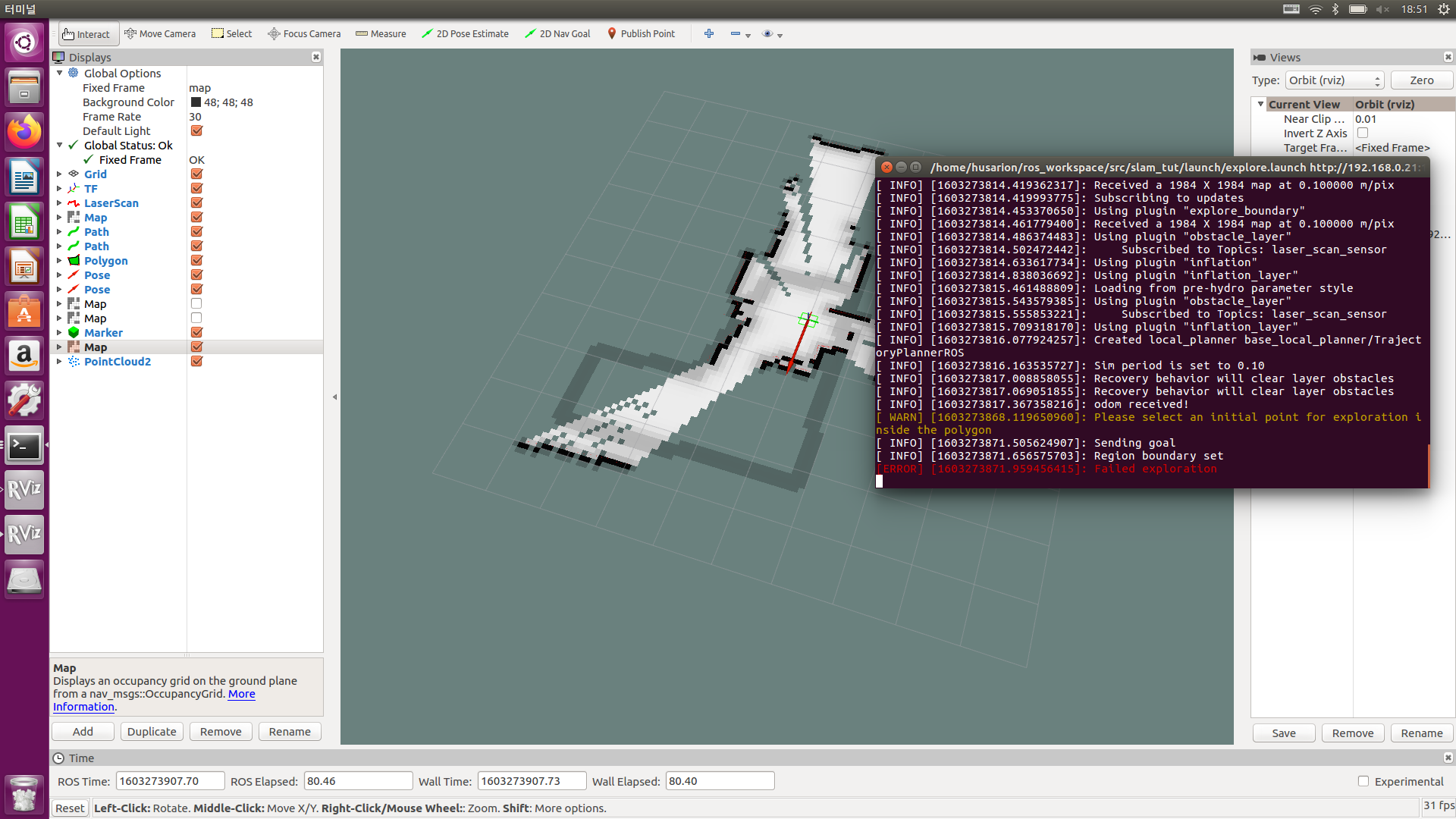
Now I am making this(Using frontier exploration | Husarion)
when I work it, I receive this message(Please refer to the picture)
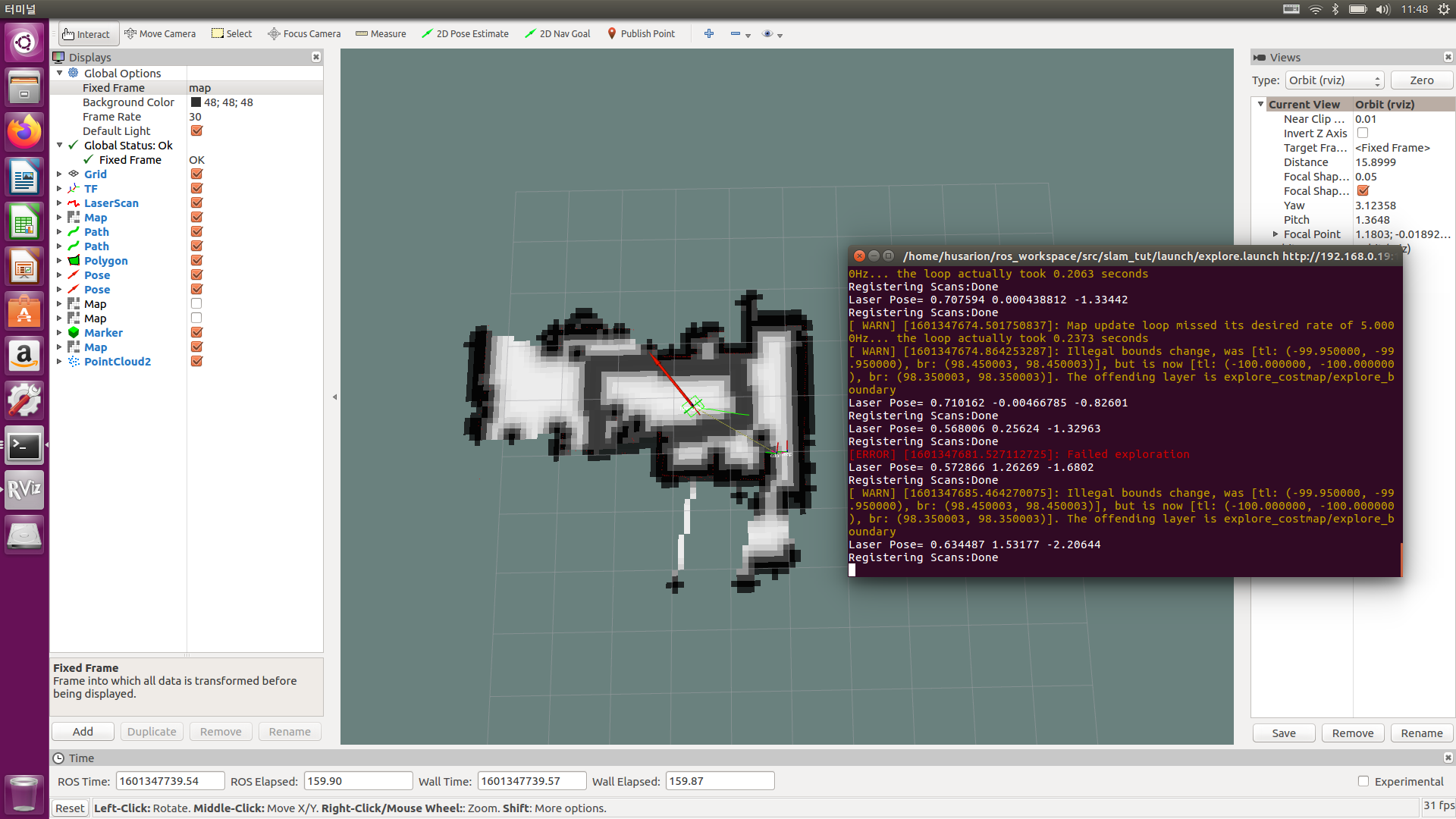
Below is a list of executable files. If you want to see other file, please ask me. I will upload it. thank you
explore.launch
<arg name="use_rosbot" default="true"/>
<arg name="use_gazebo" default="false"/>
<include if="$(arg use_gazebo)" file="$(find rosbot_gazebo)/launch/maze_world.launch"/>
<include if="$(arg use_gazebo)" file="$(find rosbot_gazebo)/launch/rosbot.launch"/>
<param if="$(arg use_gazebo)" name="use_sim_time" value="true"/>
<node if="$(arg use_rosbot)" pkg="rplidar_ros" type="rplidarNode" name="rplidar">
<param name="angle_compensate" type="bool" value="true"/>
<param name="serial_baudrate" type="int" value="115200"/><!--model A2 (ROSbot 2.0) -->
<!--<param name="serial_baudrate" type="int" value="256000"/>--><!-- model A3 (ROSbot 2.0 PRO) -->
</node>
<node pkg="tf" type="static_transform_publisher" name="laser_broadcaster" args="0 0 0 3.14 0 0 base_link laser_frame 100" />
<!--<node pkg="rviz" type="rviz" name="rviz"/>-->
<node pkg="gmapping" type="slam_gmapping" name="gmapping">
<param name="base_frame" value="base_link"/>
<param name="odom_frame" value="odom" />
<param name="delta" value="0.1" />
</node>
<node pkg="move_base" type="move_base" name="move_base" output="screen">
<param name="controller_frequency" value="10.0"/>
<rosparam file="$(find slam_tut)/config/costmap_common_params.yaml" command="load" ns="global_costmap" />
<rosparam file="$(find slam_tut)/config/costmap_common_params.yaml" command="load" ns="local_costmap" />
<rosparam file="$(find slam_tut)/config/local_costmap_params.yaml" command="load" />
<rosparam file="$(find slam_tut)/config/global_costmap_params.yaml" command="load" />
<rosparam file="$(find slam_tut)/config/trajectory_planner.yaml" command="load" />
</node>
<node pkg="frontier_exploration" type="explore_client" name="explore_client" output="screen"/>
<node pkg="frontier_exploration" type="explore_server" name="explore_server" output="screen">
<param name="frequency" type="double" value="1.0"/>
<param name="goal_aliasing" type="double" value="0.5"/>
<rosparam ns="explore_costmap" subst_value="true" file="$(find slam_tut)/config/exploration.yaml" command="load" />
</node>
costmap_common_params.yaml
obstacle_range: 6.0
raytrace_range: 8.5
footprint: [[0.12, 0.14], [0.12, -0.14], [-0.12, -0.14], [-0.12, 0.14]]
map_topic: /map
subscribe_to_updates: true
observation_sources: laser_scan_sensor
laser_scan_sensor: {sensor_frame: laser_frame, data_type: LaserScan, topic: scan, marking: true, clearing: true}
global_frame: map
robot_base_frame: base_link
always_send_full_costmap: true
local_costmap_params.yaml
local_costmap:
update_frequency: 5
publish_frequency: 5
transform_tolerance: 0.5
static_map: false
rolling_window: true
width: 3
height: 3
origin_x: -1.5
origin_y: -1.5
resolution: 0.1
inflation_radius: 0.6
global_costmap_params.yaml
global_costmap:
update_frequency: 2.5
publish_frequency: 2.5
transform_tolerance: 0.5
width: 15
height: 15
origin_x: -7.5
origin_y: -7.5
static_map: true
rolling_window: true
inflation_radius: 2.5
resolution: 0.1
trajectory_planner.yaml
TrajectoryPlannerROS:
max_vel_x: 0.2
min_vel_x: 0.1
max_vel_theta: 0.35
min_vel_theta: -0.35
min_in_place_vel_theta: 0.25
acc_lim_theta: 0.25
acc_lim_x: 2.5
acc_lim_Y: 2.5
holonomic_robot: false
meter_scoring: true
xy_goal_tolerance: 0.15
yaw_goal_tolerance: 0.25
exploration.yaml
footprint: [[0.12, 0.14], [0.12, -0.14], [-0.12, -0.14], [-0.12, 0.14]]
transform_tolerance: 5
update_frequency: 5
publish_frequency: 5
global_frame: map
robot_base_frame: base_link
plugins:
- {name: static, type: “costmap_2d::StaticLayer”}
- {name: explore_boundary, type: “frontier_exploration::BoundedExploreLayer”}
- {name: inflation, type: “costmap_2d::InflationLayer”}
static:
map_topic: /map
subscribe_to_updates: true
explore_boundary:
resize_to_boundary: false
frontier_travel_point: “middle”
explore_clear_space: false
inflation:
inflation_radius: 0.5