I am following tutorial on SLAM Navigation on Gazebo Simulation.
I am able to roslaunch GMapping and Teleoperation nodes as per the code
below
Terminal 1 : roslaunch rosbot_description rosbot_rviz_gmapping.launch
Terminal 2 : roslaunch rosbot_navigation rosbot_teleop.launch
But the Mapping is not being done. The Screenshots are attached here below
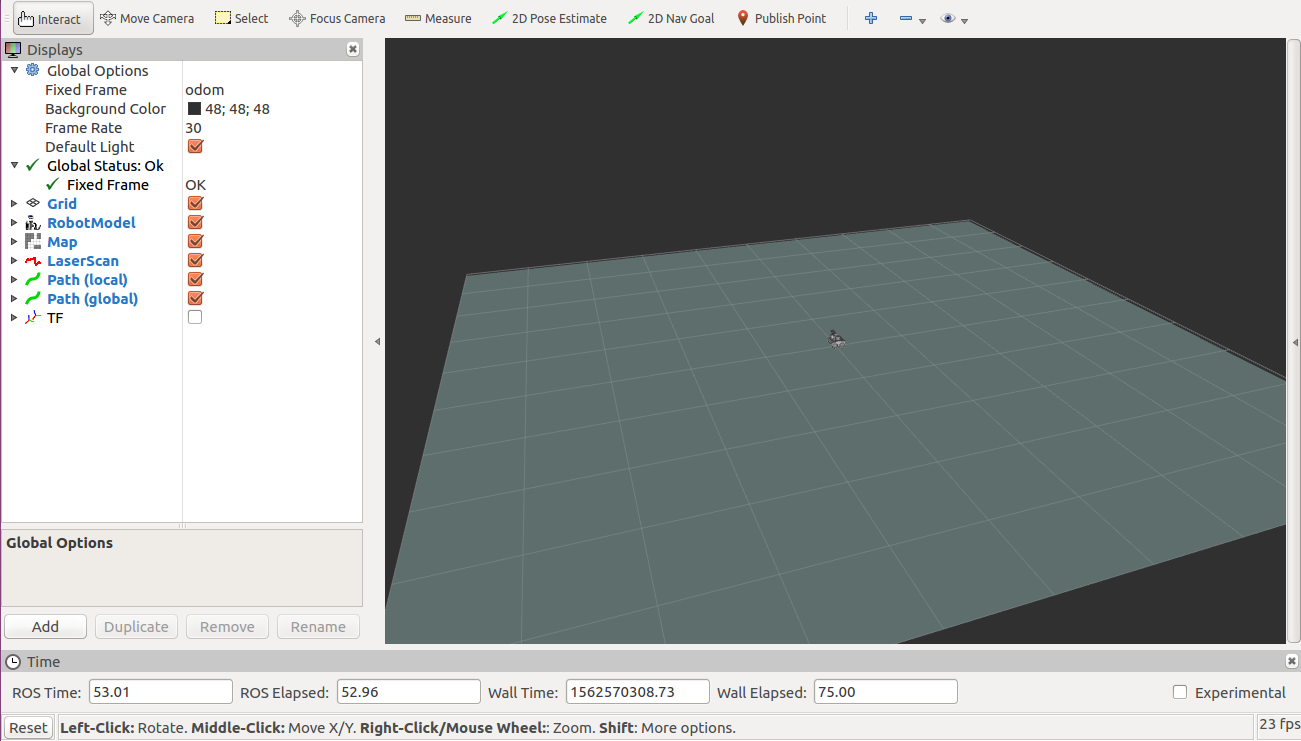
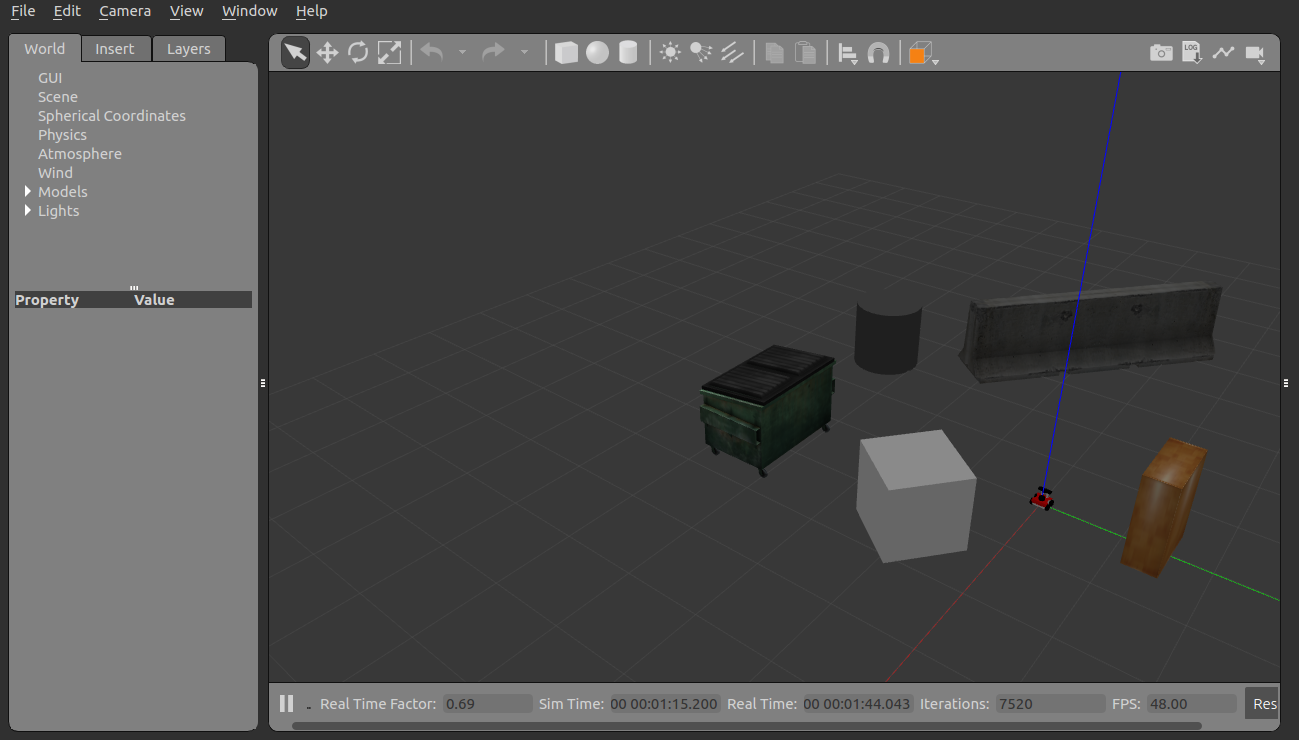
Please point out the error.