Hi @RafalGorecki ,
Thanks a lot for the help and suggestions but sitll i have the same problems. The navigation is wrking but the odometry is wrong and i get errors while running it where the robot is doing like jerky movements. Let me share with you the entire logs. The logs from the navigation container have the following errors:
navigation | [component_container_isolated-2] [ERROR] [1761209311.927313638] [panther.controller_server]: Optimizer fail to compute path
navigation | [component_container_isolated-2] [ERROR] [1761209312.550470495] [panther.controller_server]: Optimizer fail to compute path
navigation | [component_container_isolated-2] [ERROR] [1761209316.587100860] [panther.controller_server]: Optimizer fail to compute path
navigation | [component_container_isolated-2] [ERROR] [1761209316.709602501] [panther.controller_server]: Optimizer fail to compute path
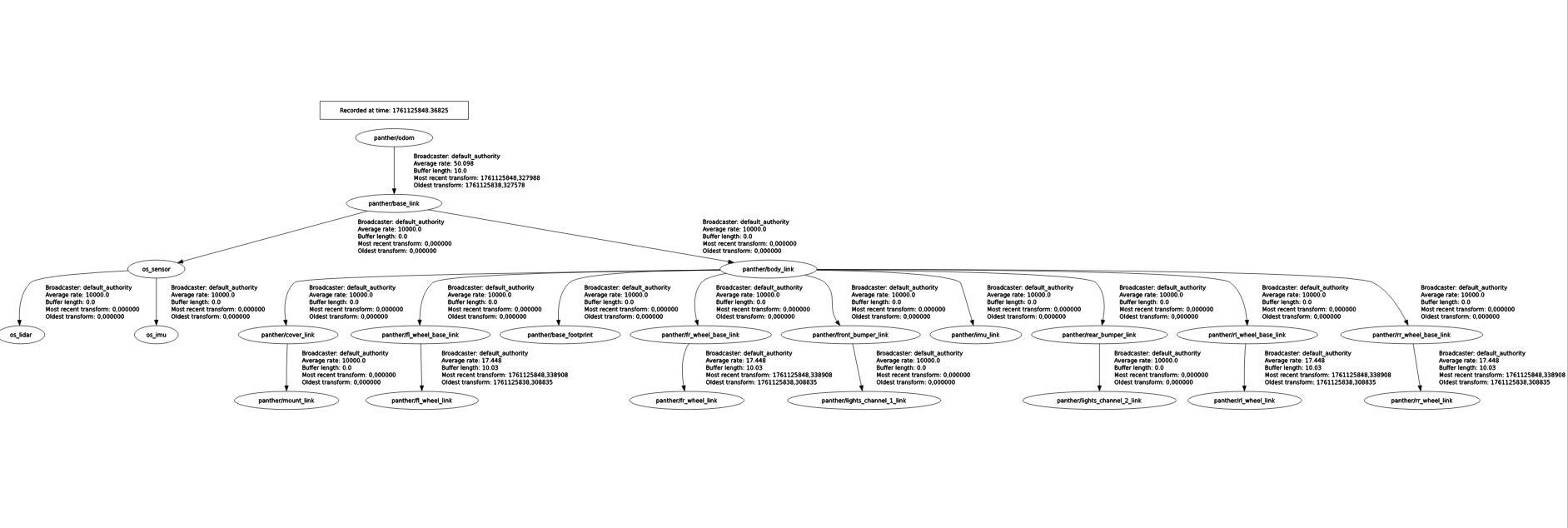
navigation | [component_container_isolated-2] [ERROR] [1761209316.829633544] [transformPoseInTargetFrame]: No Transform available Error looking up target frame: “odom” passed to lookupTransform argument target_frame does not exist.
navigation | [component_container_isolated-2] [ERROR] [1761209316.829717324] [panther.behavior_server]: Current robot pose is not available.
navigation | [component_container_isolated-2] [ERROR] [1761209321.914308263] [panther.controller_server]: Optimizer fail to compute path
navigation | [component_container_isolated-2] [ERROR] [1761209325.549578049] [transformPoseInTargetFrame]: No Transform available Error looking up target frame: “odom” passed to lookupTransform argument target_frame does not exist.
navigation | [component_container_isolated-2] [ERROR] [1761209325.549655393] [panther.behavior_server]: Initial robot pose is not available.
I really can’t understand why the navigation husarion_ugv_navigation tryes to use /odom when in the nav2_params.yaml its setup to panther/odom. And the odometry is actually the problem becasue the slam_toolbox is working just the odometry is wrong.
this is the ros2 topic info /ouster/points -v
Type: sensor_msgs/msg/PointCloud2
Publisher count: 1
Node name: os_driver
Node namespace: /ouster
Topic type: sensor_msgs/msg/PointCloud2
Endpoint type: PUBLISHER
GID: 01.10.a8.55.b1.8c.08.dd.76.ad.14.3d.00.00.2d.03.00.00.00.00.00.00.00.00
QoS profile:
Reliability: BEST_EFFORT
History (Depth): KEEP_LAST (5)
Durability: VOLATILE
Lifespan: Infinite
Deadline: Infinite
Liveliness: AUTOMATIC
Liveliness lease duration: Infinite
Subscription count: 3
Node name: pointcloud_to_laserscan
Node namespace: /panther
Topic type: sensor_msgs/msg/PointCloud2
Endpoint type: SUBSCRIPTION
GID: 01.10.84.1c.8a.fd.b7.39.ea.0b.80.f0.00.00.16.04.00.00.00.00.00.00.00.00
QoS profile:
Reliability: BEST_EFFORT
History (Depth): KEEP_LAST (20)
Durability: VOLATILE
Lifespan: Infinite
Deadline: Infinite
Liveliness: AUTOMATIC
Liveliness lease duration: Infinite
Node name: local_costmap
Node namespace: /panther/local_costmap
Topic type: sensor_msgs/msg/PointCloud2
Endpoint type: SUBSCRIPTION
GID: 01.10.e0.a7.ad.c2.56.a7.2d.a9.56.9f.00.01.f3.04.00.00.00.00.00.00.00.00
QoS profile:
Reliability: BEST_EFFORT
History (Depth): KEEP_LAST (50)
Durability: VOLATILE
Lifespan: Infinite
Deadline: Infinite
Liveliness: AUTOMATIC
Liveliness lease duration: Infinite
Node name: global_costmap
Node namespace: /panther/global_costmap
Topic type: sensor_msgs/msg/PointCloud2
Endpoint type: SUBSCRIPTION
GID: 01.10.e0.a7.ad.c2.56.a7.2d.a9.56.9f.00.01.fc.04.00.00.00.00.00.00.00.00
QoS profile:
Reliability: BEST_EFFORT
History (Depth): KEEP_LAST (50)
Durability: VOLATILE
Lifespan: Infinite
Deadline: Infinite
Liveliness: AUTOMATIC
Liveliness lease duration: Infinite
And i can see the correct pipleline.
More info about my setup:
on the Rpi i am using image: husarion/husarion-ugv:humble-2.2.2-20250702. with the default compose.yaml, i didn’t change anything here.
I am using the default also version of GitHub - husarion/husarion-ugv-autonomy at humble with the husarion/husarion-ugv-autonomy:humble-0.1.0-20250512
Just in case this is my nav2_params.yaml
NAVIGATION
bt_navigator:
ros__parameters:
use_sim_time: false
global_frame: /map
robot_base_frame: /base_link
odom_topic: /panther/odometry/filtered
plugin_lib_names:
- is_estop
- nav2_compute_path_to_pose_action_bt_node
- nav2_follow_path_action_bt_node
- nav2_back_up_action_bt_node
- nav2_spin_action_bt_node
- nav2_wait_action_bt_node
- nav2_clear_costmap_service_bt_node
- nav2_is_stuck_condition_bt_node
- nav2_goal_reached_condition_bt_node
- nav2_goal_updated_condition_bt_node
- nav2_initial_pose_received_condition_bt_node
- nav2_reinitialize_global_localization_service_bt_node
- nav2_rate_controller_bt_node
- nav2_distance_controller_bt_node
- nav2_speed_controller_bt_node
- nav2_truncate_path_action_bt_node
- nav2_goal_updater_node_bt_node
- nav2_recovery_node_bt_node
- nav2_pipeline_sequence_bt_node
- nav2_round_robin_node_bt_node
- nav2_transform_available_condition_bt_node
- nav2_time_expired_condition_bt_node
- nav2_distance_traveled_condition_bt_node
- nav2_remove_passed_goals_action_bt_node
- nav2_compute_path_through_poses_action_bt_node
bt_navigator_navigate_through_poses_rclcpp_node:
ros__parameters:
use_sim_time: false
bt_navigator_navigate_to_pose_rclcpp_node:
ros__parameters:
use_sim_time: false
controller_server:
ros__parameters:
use_sim_time: false
controller_frequency: 10.0
odom_topic: /panther/odometry/filtered
costmap_update_timeout: 0.5
min_x_velocity_threshold: 0.01
min_y_velocity_threshold: 0.01
min_theta_velocity_threshold: 0.05
failure_tolerance: 0.4
use_realtime_priority: false
# Progress checker parameters
progress_checker_plugin: progress_checker
progress_checker:
movement_time_allowance: 10.0
plugin: nav2_controller::SimpleProgressChecker
required_movement_radius: 0.5
# Goal checker parameters
goal_checker_plugins: [goal_checker]
goal_checker:
plugin: nav2_controller::SimpleGoalChecker
stateful: true
xy_goal_tolerance: 0.1
yaw_goal_tolerance: 0.15
# MPPI controller
controller_plugins: [FollowPath]
FollowPath:
plugin: nav2_mppi_controller::MPPIController
time_steps: 40
model_dt: 0.1
batch_size: 800
vx_std: 0.4
vy_std: 0.0
wz_std: 0.5
vx_max: 0.8
vx_min: -0.5
vy_max: 0.0
wz_max: 1.0
iteration_count: 1
prune_distance: 2.5
transform_tolerance: 0.1
temperature: 0.3
gamma: 0.015
motion_model: DiffDrive
regenerate_noises: true
visualize: false
AckermannConstraints:
min_turning_r: 0.05
critics: [ConstraintCritic, CostCritic, GoalCritic, GoalAngleCritic, PathAlignCritic, PathFollowCritic, PathAngleCritic, PreferForwardCritic]
ConstraintCritic:
enabled: false
cost_power: 1
cost_weight: 4.0
GoalCritic:
enabled: true
cost_power: 1
cost_weight: 5.0
threshold_to_consider: 3.2
GoalAngleCritic:
enabled: true
cost_power: 1
cost_weight: 3.0
threshold_to_consider: 0.1
PreferForwardCritic:
enabled: true
cost_power: 1
cost_weight: 7.0
threshold_to_consider: 1.5
CostCritic:
enabled: true
cost_power: 1
cost_weight: 3.81
critical_cost: 300.0
consider_footprint: true
collision_cost: 1000000.0
near_goal_distance: 1.0
PathAlignCritic:
enabled: true
cost_power: 1
cost_weight: 14.0
max_path_occupancy_ratio: 0.05
trajectory_point_step: 4
threshold_to_consider: 0.5
offset_from_furthest: 20
use_path_orientations: false
PathFollowCritic:
enabled: true
cost_power: 1
cost_weight: 5.0
offset_from_furthest: 5
threshold_to_consider: 3.2
PathAngleCritic:
enabled: true
cost_power: 1
cost_weight: 2.0
offset_from_furthest: 4
threshold_to_consider: 0.5
max_angle_to_furthest: 1.0
mode: 0
# TwirlingCritic:
# enabled: true
# twirling_cost_power: 1
# twirling_cost_weight: 10.0
local_costmap:
local_costmap:
ros__parameters:
use_sim_time: false
global_frame: <namespace>/odom
robot_base_frame: <namespace>/base_link
transform_tolerance: 0.1
update_frequency: 5.0
publish_frequency: 2.0
width: 8
height: 8
resolution: 0.04
always_send_full_costmap: true
rolling_window: true
footprint: '[[0.45, 0.47], [0.45, -0.47], [-0.45, -0.47], [-0.45, 0.47]]'
plugins: [<obstacle_layer>, <voxel_layer>, inflation_layer]
inflation_layer:
plugin: nav2_costmap_2d::InflationLayer
cost_scaling_factor: 1.3
inflation_radius: 1.5
obstacle_layer:
plugin: nav2_costmap_2d::ObstacleLayer
footprint_clearing_enabled: true
observation_sources: scan
scan:
topic: <observation_topic>
clearing: true
marking: true
data_type: LaserScan
min_obstacle_height: 0.1
max_obstacle_height: 0.5
obstacle_max_range: 20.0
obstacle_min_range: 0.7
raytrace_max_range: 20.0
raytrace_min_range: 0.7
voxel_layer:
plugin: nav2_costmap_2d::VoxelLayer
footprint_clearing_enabled: true
origin_z: 0.0
z_resolution: 0.05
z_voxels: 10
min_obstacle_height: 0.1
max_obstacle_height: 0.5
mark_threshold: 0
observation_sources: point_cloud
point_cloud:
topic: <observation_topic>
clearing: true
marking: true
data_type: PointCloud2
min_obstacle_height: 0.1
max_obstacle_height: 0.5
obstacle_max_range: 20.0
obstacle_min_range: 0.7
raytrace_max_range: 20.0
raytrace_min_range: 0.7
global_costmap:
global_costmap:
ros__parameters:
use_sim_time: false
global_frame: <namespace>/map
robot_base_frame: <namespace>/base_link
transform_tolerance: 0.1
update_frequency: 1.0
publish_frequency: 1.0
resolution: 0.05
always_send_full_costmap: true
track_unknown_space: true # if false, treats unknown space as free space, else as unknown space
footprint: '[[0.45, 0.47], [0.45, -0.47], [-0.45, -0.47], [-0.45, 0.47]]'
plugins: [static_layer, <obstacle_layer>, <voxel_layer>, inflation_layer]
inflation_layer:
plugin: nav2_costmap_2d::InflationLayer
cost_scaling_factor: 1.5
inflation_radius: 1.5
inflate_around_unknown: false
inflate_unknown: false
obstacle_layer:
plugin: nav2_costmap_2d::ObstacleLayer
footprint_clearing_enabled: true
observation_sources: scan
scan:
clearing: true
marking: true
data_type: LaserScan
min_obstacle_height: 0.1
max_obstacle_height: 0.5
obstacle_max_range: 20.0
obstacle_min_range: 0.7
raytrace_max_range: 20.0
raytrace_min_range: 0.7
static_layer:
plugin: nav2_costmap_2d::StaticLayer
map_subscribe_transient_local: true
map_topic: /<namespace>/map
voxel_layer:
plugin: nav2_costmap_2d::VoxelLayer
footprint_clearing_enabled: true
origin_z: 0.0
z_resolution: 0.05
z_voxels: 10
min_obstacle_height: 0.1
max_obstacle_height: 0.5
mark_threshold: 0
observation_sources: point_cloud
point_cloud:
topic: <observation_topic>
clearing: true
marking: true
data_type: PointCloud2
min_obstacle_height: 0.1
max_obstacle_height: 0.5
obstacle_max_range: 20.0
obstacle_min_range: 0.7
raytrace_max_range: 20.0
raytrace_min_range: 0.7
planner_server:
ros__parameters:
use_sim_time: false
expected_planner_frequency: 1.0
planner_plugins: [GridBased]
GridBased:
plugin: nav2_smac_planner/SmacPlanner2D
tolerance: 0.125 # tolerance for planning if unable to reach exact pose, in meters
downsample_costmap: false # whether or not to downsample the map
downsampling_factor: 1 # multiplier for the resolution of the costmap layer (e.g. 2 on a 5cm costmap would be 10cm)
allow_unknown: true # allow traveling in unknown space
max_iterations: 600000 # maximum total iterations to search for before failing (in case unreachable), set to -1 to disable
max_on_approach_iterations: 500 # maximum number of iterations to attempt to reach goal once in tolerance
max_planning_time: 3.0 # max time in s for planner to plan, smooth
cost_travel_multiplier: 2.5 # Cost multiplier to apply to search to steer away from high cost areas. Larger values will place in the center of aisles more exactly (if non-`FREE` cost potential field exists) but take slightly longer to compute. To optimize for speed, a value of 1.0 is reasonable. A reasonable tradeoff value is 2.0. A value of 0.0 effective disables steering away from obstacles and acts like a naive binary search A*.
use_final_approach_orientation: false # Whether to set the final path pose at the goal's orientation to the requested orientation (false) or in line with the approach angle so the robot doesn't rotate to heading (true)
smoother:
max_iterations: 500
w_smooth: 0.2
w_data: 0.2
tolerance: 1.0e-6
recoveries_server:
ros__parameters:
use_sim_time: false
global_frame: <namespace>/odom
robot_base_frame: <namespace>/base_link
transform_tolerance: 0.1
costmap_topic: local_costmap/costmap_raw
footprint_topic: local_costmap/published_footprint
cycle_frequency: 10.0
recovery_plugins: [spin, backup, wait]
spin:
plugin: nav2_recoveries/Spin
backup:
plugin: nav2_recoveries/BackUp
wait:
plugin: nav2_recoveries/Wait
# spin & backup
simulate_ahead_time: 2.0
# spin
max_rotational_vel: 1.0
min_rotational_vel: 0.4
rotational_acc_lim: 3.2
behavior_server:
ros__parameters:
use_sim_time: false
waypoint_follower:
ros__parameters:
use_sim_time: false
loop_rate: 20
stop_on_failure: false
waypoint_task_executor_plugin: wait_at_waypoint
wait_at_waypoint:
plugin: nav2_waypoint_follower::WaitAtWaypoint
waypoint_pause_duration: 5
velocity_smoother:
ros__parameters:
use_sim_time: False
smoothing_frequency: 20.0
scale_velocities: False
feedback: OPEN_LOOP
max_velocity: [0.8, 0.0, 1.0]
min_velocity: [-0.5, 0.0, -1.0]
max_accel: [1.5, 0.0, 2.0]
max_decel: [-1.5, 0.0, -2.0]
odom_topic: /odom
odom_duration: 0.1
deadband_velocity: [0.0, 0.0, 0.0]
velocity_timeout: 1.0
LOCALIZATION
amcl:
ros__parameters:
use_sim_time: false
global_frame_id: <namespace>/map
odom_frame_id: <namespace>/odom
base_frame_id: <namespace>/base_link
scan_topic: <scan_topic>
robot_model_type: nav2_amcl::DifferentialMotionModel
set_initial_pose: true
always_reset_initial_pose: true
initial_pose:
x: 0.0
y: 0.0
yaw: 0.0
tf_broadcast: true
transform_tolerance: 1.0
alpha1: 0.2
alpha2: 0.2
alpha3: 0.2
alpha4: 0.2
alpha5: 0.2
# Beam skipping - ignores beams for which a majoirty of particles do not agree with the map
# prevents correct particles from getting down weighted because of unexpected obstacles
# such as humans
do_beamskip: false
beam_skip_distance: 0.5
beam_skip_error_threshold: 0.9
beam_skip_threshold: 0.3
lambda_short: 0.1
laser_model_type: likelihood_field
laser_likelihood_max_dist: 2.0
laser_max_range: 12.0
laser_min_range: 0.7
max_beams: 60
max_particles: 2000
min_particles: 500
pf_err: 0.05
pf_z: 0.99
recovery_alpha_fast: 0.0
recovery_alpha_slow: 0.0
resample_interval: 1
save_pose_rate: 0.5
sigma_hit: 0.2
update_min_a: 0.1
update_min_d: 0.15
z_hit: 0.5
z_max: 0.05
z_rand: 0.5
z_short: 0.05
MAP SERVER
map_server:
ros__parameters:
use_sim_time: false
yaml_filename: map.yaml
frame_id: /map
map_autosaver:
ros__parameters:
use_sim_time: false
autosave_period: 15.0
map_directory: /maps/map
SLAM
/slam_toolbox:
ros__parameters:
Plugin params
solver_plugin: solver_plugins::CeresSolver
ceres_linear_solver: SPARSE_NORMAL_CHOLESKY
ceres_preconditioner: SCHUR_JACOBI
ceres_trust_strategy: LEVENBERG_MARQUARDT
ceres_dogleg_type: TRADITIONAL_DOGLEG
ceres_loss_function: None #HuberLoss
# ROS Parameters
odom_frame: <namespace>/odom
map_frame: <namespace>/map
base_frame: <namespace>/base_link
scan_topic: <scan_topic>
mode: mapping #localization
debug_logging: false
throttle_scans: 1
transform_publish_period: 0.04
map_update_interval: 1.0
resolution: 0.05
max_laser_range: 12.0 #for rastering images
minimum_time_interval: 0.05
transform_timeout: 0.5
tf_buffer_duration: 20.0
stack_size_to_use: 40000000 #// program needs a larger stack size to serialize large maps
enable_interactive_mode: false
# General Parameters
use_scan_matching: true
use_scan_barycenter: true
minimum_travel_distance: 0.2
minimum_travel_heading: 0.1
scan_buffer_size: 10
scan_buffer_maximum_scan_distance: 0.5
link_match_minimum_response_fine: 0.1
link_scan_maximum_distance: 0.75
loop_search_maximum_distance: 3.0
do_loop_closing: true
loop_match_minimum_chain_size: 10
loop_match_maximum_variance_coarse: 3.0
loop_match_minimum_response_coarse: 0.35
loop_match_minimum_response_fine: 0.45
# Correlation Parameters - Correlation Parameters
correlation_search_space_dimension: 0.5
correlation_search_space_resolution: 0.01
correlation_search_space_smear_deviation: 0.1
# Correlation Parameters - Loop Closure Parameters
loop_search_space_dimension: 8.0
loop_search_space_resolution: 0.05
loop_search_space_smear_deviation: 0.03
# Scan Matcher Parameters
distance_variance_penalty: 0.5
angle_variance_penalty: 1.0
fine_search_angle_offset: 0.00349
coarse_search_angle_offset: 0.349
coarse_angle_resolution: 0.0349
minimum_angle_penalty: 0.9
minimum_distance_penalty: 0.5
use_response_expansion: true
use_sim_time: false
Finally on the foxglove of the autonav what i can see:
let me know in case i can provide any aditional logs