I am attempting to create a program to avoid obstacles. I first bring up the docker containers for the ROSbot2R from Husarion supplied containers as you can see in my terminal output.
Further planning wants me to take a look at the laser outputs to determine forward facing collision cone indexes. I am a little shocked and surprised at what my echo of the scan output shows. I’m an expert but I don’t believe I know how to interpret the readings. Shouldn’t they be continuous?
ON THE ROSBOT2R
[+] Running 3/3
⠿ Container rosbot-bringup-rplidar-1 Created 1.1s
⠿ Container rosbot-bringup-rosbot-1 Created 1.2s
⠿ Container rosbot-bringup-microros-1 Created 1.2s
Attaching to rosbot-bringup-microros-1, rosbot-bringup-rosbot-1, rosbot-bringup-rplidar-1
rosbot-bringup-microros-1 | [1674160895.635340] info | TermiosAgentLinux.cpp | init | running… | fd: 3
rosbot-bringup-microros-1 | [1674160895.637412] info | Root.cpp | set_verbose_level | logger setup | verbose_level: 4
rosbot-bringup-microros-1 | [1674160895.671182] info | Root.cpp | create_client | create | client_key: 0x4033E6BD, session_id: 0x81
rosbot-bringup-microros-1 | [1674160895.671402] info | SessionManager.hpp | establish_session | session established | client_key: 0x4033E6BD, address: 0
rosbot-bringup-microros-1 | [1674160895.723840] info | ProxyClient.cpp | create_participant | participant created | client_key: 0x4033E6BD, participant_id: 0x000(1)
rosbot-bringup-microros-1 | [1674160895.727645] info | ProxyClient.cpp | create_topic | topic created | client_key: 0x4033E6BD, topic_id: 0x000(2), participant_id: 0x000(1)
rosbot-bringup-microros-1 | [1674160895.729876] info | ProxyClient.cpp | create_subscriber | subscriber created | client_key: 0x4033E6BD, subscriber_id: 0x000(4), participant_id: 0x000(1)
rosbot-bringup-microros-1 | [1674160895.740577] info | ProxyClient.cpp | create_datareader | datareader created | client_key: 0x4033E6BD, datareader_id: 0x000(6), subscriber_id: 0x000(4)
rosbot-bringup-microros-1 | [1674160895.745116] info | ProxyClient.cpp | create_topic | topic created | client_key: 0x4033E6BD, topic_id: 0x001(2), participant_id: 0x000(1)
rosbot-bringup-microros-1 | [1674160895.747023] info | ProxyClient.cpp | create_publisher | publisher created | client_key: 0x4033E6BD, publisher_id: 0x000(3), participant_id: 0x000(1)
rosbot-bringup-microros-1 | [1674160895.751844] info | ProxyClient.cpp | create_datawriter | datawriter created | client_key: 0x4033E6BD, datawriter_id: 0x000(5), publisher_id: 0x000(3)
rosbot-bringup-microros-1 | [1674160895.755112] info | ProxyClient.cpp | create_topic | topic created | client_key: 0x4033E6BD, topic_id: 0x002(2), participant_id: 0x000(1)
rosbot-bringup-microros-1 | [1674160895.757078] info | ProxyClient.cpp | create_publisher | publisher created | client_key: 0x4033E6BD, publisher_id: 0x001(3), participant_id: 0x000(1)
rosbot-bringup-microros-1 | [1674160895.760453] info | ProxyClient.cpp | create_datawriter | datawriter created | client_key: 0x4033E6BD, datawriter_id: 0x001(5), publisher_id: 0x001(3)
rosbot-bringup-microros-1 | [1674160895.764574] info | ProxyClient.cpp | create_topic | topic created | client_key: 0x4033E6BD, topic_id: 0x003(2), participant_id: 0x000(1)
rosbot-bringup-microros-1 | [1674160895.766901] info | ProxyClient.cpp | create_publisher | publisher created | client_key: 0x4033E6BD, publisher_id: 0x002(3), participant_id: 0x000(1)
rosbot-bringup-microros-1 | [1674160895.774600] info | ProxyClient.cpp | create_datawriter | datawriter created | client_key: 0x4033E6BD, datawriter_id: 0x002(5), publisher_id: 0x002(3)
rosbot-bringup-microros-1 | [1674160895.778643] info | ProxyClient.cpp | create_topic | topic created | client_key: 0x4033E6BD, topic_id: 0x004(2), participant_id: 0x000(1)
rosbot-bringup-microros-1 | [1674160895.780765] info | ProxyClient.cpp | create_publisher | publisher created | client_key: 0x4033E6BD, publisher_id: 0x003(3), participant_id: 0x000(1)
rosbot-bringup-microros-1 | [1674160895.793580] info | ProxyClient.cpp | create_datawriter | datawriter created | client_key: 0x4033E6BD, datawriter_id: 0x003(5), publisher_id: 0x003(3)
rosbot-bringup-microros-1 | [1674160895.797546] info | ProxyClient.cpp | create_topic | topic created | client_key: 0x4033E6BD, topic_id: 0x005(2), participant_id: 0x000(1)
rosbot-bringup-microros-1 | [1674160895.799459] info | ProxyClient.cpp | create_publisher | publisher created | client_key: 0x4033E6BD, publisher_id: 0x004(3), participant_id: 0x000(1)
rosbot-bringup-microros-1 | [1674160895.802569] info | ProxyClient.cpp | create_datawriter | datawriter created | client_key: 0x4033E6BD, datawriter_id: 0x004(5), publisher_id: 0x004(3)
rosbot-bringup-microros-1 | [1674160895.806922] info | ProxyClient.cpp | create_topic | topic created | client_key: 0x4033E6BD, topic_id: 0x006(2), participant_id: 0x000(1)
rosbot-bringup-microros-1 | [1674160895.808775] info | ProxyClient.cpp | create_publisher | publisher created | client_key: 0x4033E6BD, publisher_id: 0x005(3), participant_id: 0x000(1)
rosbot-bringup-microros-1 | [1674160895.811679] info | ProxyClient.cpp | create_datawriter | datawriter created | client_key: 0x4033E6BD, datawriter_id: 0x005(5), publisher_id: 0x005(3)
rosbot-bringup-microros-1 | [1674160895.815680] info | ProxyClient.cpp | create_topic | topic created | client_key: 0x4033E6BD, topic_id: 0x007(2), participant_id: 0x000(1)
rosbot-bringup-microros-1 | [1674160895.818231] info | ProxyClient.cpp | create_publisher | publisher created | client_key: 0x4033E6BD, publisher_id: 0x006(3), participant_id: 0x000(1)
rosbot-bringup-microros-1 | [1674160895.821760] info | ProxyClient.cpp | create_datawriter | datawriter created | client_key: 0x4033E6BD, datawriter_id: 0x006(5), publisher_id: 0x006(3)
rosbot-bringup-microros-1 | [1674160895.825990] info | ProxyClient.cpp | create_topic | topic created | client_key: 0x4033E6BD, topic_id: 0x008(2), participant_id: 0x000(1)
rosbot-bringup-microros-1 | [1674160895.828775] info | ProxyClient.cpp | create_publisher | publisher created | client_key: 0x4033E6BD, publisher_id: 0x007(3), participant_id: 0x000(1)
rosbot-bringup-microros-1 | [1674160895.842535] info | ProxyClient.cpp | create_datawriter | datawriter created | client_key: 0x4033E6BD, datawriter_id: 0x007(5), publisher_id: 0x007(3)
rosbot-bringup-microros-1 | [1674160895.845459] info | ProxyClient.cpp | create_topic | topic created | client_key: 0x4033E6BD, topic_id: 0x009(2), participant_id: 0x000(1)
rosbot-bringup-microros-1 | [1674160895.847355] info | ProxyClient.cpp | create_publisher | publisher created | client_key: 0x4033E6BD, publisher_id: 0x008(3), participant_id: 0x000(1)
rosbot-bringup-microros-1 | [1674160895.850314] info | ProxyClient.cpp | create_datawriter | datawriter created | client_key: 0x4033E6BD, datawriter_id: 0x008(5), publisher_id: 0x008(3)
rosbot-bringup-rplidar-1 | [INFO] [launch]: All log files can be found below /root/.ros/log/2023-01-19-20-41-36-147698-husarion-1
rosbot-bringup-rplidar-1 | [INFO] [launch]: Default logging verbosity is set to INFO
rosbot-bringup-rosbot-1 | [INFO] [launch]: All log files can be found below /root/.ros/log/2023-01-19-20-41-36-410367-husarion-1
rosbot-bringup-rosbot-1 | [INFO] [launch]: Default logging verbosity is set to INFO
rosbot-bringup-rplidar-1 | [INFO] [sllidar_node-1]: process started with pid [59]
rosbot-bringup-rplidar-1 | [sllidar_node-1] [INFO] [1674160896.755395772] [sllidar_node]: SLLidar running on ROS2 package SLLidar.ROS2 SDK Version:1.0.1, SLLIDAR SDK Version:2.0.0
rosbot-bringup-rplidar-1 | [sllidar_node-1] [INFO] [1674160896.810386715] [sllidar_node]: SLLidar S/N: 5086EDF9C7E29BD1A7E39EF2C055431B
rosbot-bringup-rplidar-1 | [sllidar_node-1] [INFO] [1674160896.810586139] [sllidar_node]: Firmware Ver: 1.28
rosbot-bringup-rplidar-1 | [sllidar_node-1] [INFO] [1674160896.810635658] [sllidar_node]: Hardware Rev: 7
rosbot-bringup-rplidar-1 | [sllidar_node-1] [INFO] [1674160896.861995824] [sllidar_node]: SLLidar health status : 0
rosbot-bringup-rplidar-1 | [sllidar_node-1] [INFO] [1674160896.862198860] [sllidar_node]: SLLidar health status : OK.
rosbot-bringup-rplidar-1 | [sllidar_node-1] [INFO] [1674160897.408425324] [sllidar_node]: current scan mode: Standard, sample rate: 2 Khz, max_distance: 16.0 m, scan frequency:10.0 Hz,
rosbot-bringup-rosbot-1 | [INFO] [robot_state_publisher-1]: process started with pid [60]
rosbot-bringup-rosbot-1 | [INFO] [ros2_control_node-2]: process started with pid [62]
rosbot-bringup-rosbot-1 | [INFO] [ekf_node-3]: process started with pid [64]
rosbot-bringup-rosbot-1 | [INFO] [spawner-4]: process started with pid [66]
rosbot-bringup-rosbot-1 | [robot_state_publisher-1] Link body_link had 11 children
rosbot-bringup-rosbot-1 | [robot_state_publisher-1] Link camera_link had 1 children
rosbot-bringup-rosbot-1 | [robot_state_publisher-1] Link orbbec_astra_link had 1 children
rosbot-bringup-rosbot-1 | [robot_state_publisher-1] Link orbbec_astra_depth_link had 1 children
rosbot-bringup-rosbot-1 | [robot_state_publisher-1] Link orbbec_astra_depth_reference_link had 0 children
rosbot-bringup-rosbot-1 | [robot_state_publisher-1] Link cover_link had 1 children
rosbot-bringup-rosbot-1 | [robot_state_publisher-1] Link rplidar_a2_link had 1 children
rosbot-bringup-rosbot-1 | [robot_state_publisher-1] Link laser had 0 children
rosbot-bringup-rosbot-1 | [robot_state_publisher-1] Link imu_link had 0 children
rosbot-bringup-rosbot-1 | [robot_state_publisher-1] Link fl_range had 0 children
rosbot-bringup-rosbot-1 | [robot_state_publisher-1] Link fl_wheel_link had 0 children
rosbot-bringup-rosbot-1 | [robot_state_publisher-1] Link fr_range had 0 children
rosbot-bringup-rosbot-1 | [robot_state_publisher-1] Link fr_wheel_link had 0 children
rosbot-bringup-rosbot-1 | [robot_state_publisher-1] Link rl_range had 0 children
rosbot-bringup-rosbot-1 | [robot_state_publisher-1] Link rl_wheel_link had 0 children
rosbot-bringup-rosbot-1 | [robot_state_publisher-1] Link rr_range had 0 children
rosbot-bringup-rosbot-1 | [robot_state_publisher-1] Link rr_wheel_link had 0 children
rosbot-bringup-rosbot-1 | [ros2_control_node-2] [INFO] [1674160898.615799986] [resource_manager]: Loading hardware ‘imu’
rosbot-bringup-rosbot-1 | [ros2_control_node-2] [INFO] [1674160898.634821592] [resource_manager]: Initialize hardware ‘imu’
rosbot-bringup-rosbot-1 | [ros2_control_node-2] [INFO] [1674160898.634968312] [RosbotImuSensor]: Initializing
rosbot-bringup-rosbot-1 | [robot_state_publisher-1] [INFO] [1674160898.616258371] [robot_state_publisher]: got segment base_link
rosbot-bringup-rosbot-1 | [robot_state_publisher-1] [INFO] [1674160898.617531118] [robot_state_publisher]: got segment body_link
rosbot-bringup-rosbot-1 | [robot_state_publisher-1] [INFO] [1674160898.617646599] [robot_state_publisher]: got segment camera_link
rosbot-bringup-rosbot-1 | [robot_state_publisher-1] [INFO] [1674160898.617685691] [robot_state_publisher]: got segment cover_link
rosbot-bringup-rosbot-1 | [robot_state_publisher-1] [INFO] [1674160898.617717580] [robot_state_publisher]: got segment fl_range
rosbot-bringup-rosbot-1 | [robot_state_publisher-1] [INFO] [1674160898.617746191] [robot_state_publisher]: got segment fl_wheel_link
rosbot-bringup-rosbot-1 | [robot_state_publisher-1] [INFO] [1674160898.617774598] [robot_state_publisher]: got segment fr_range
rosbot-bringup-rosbot-1 | [robot_state_publisher-1] [INFO] [1674160898.617802190] [robot_state_publisher]: got segment fr_wheel_link
rosbot-bringup-rosbot-1 | [robot_state_publisher-1] [INFO] [1674160898.617829912] [robot_state_publisher]: got segment imu_link
rosbot-bringup-rosbot-1 | [robot_state_publisher-1] [INFO] [1674160898.617856838] [robot_state_publisher]: got segment laser
rosbot-bringup-rosbot-1 | [robot_state_publisher-1] [INFO] [1674160898.617883319] [robot_state_publisher]: got segment orbbec_astra_depth_link
rosbot-bringup-rosbot-1 | [robot_state_publisher-1] [INFO] [1674160898.617910726] [robot_state_publisher]: got segment orbbec_astra_depth_reference_link
rosbot-bringup-rosbot-1 | [robot_state_publisher-1] [INFO] [1674160898.617939133] [robot_state_publisher]: got segment orbbec_astra_link
rosbot-bringup-rosbot-1 | [robot_state_publisher-1] [INFO] [1674160898.617966022] [robot_state_publisher]: got segment rl_range
rosbot-bringup-rosbot-1 | [robot_state_publisher-1] [INFO] [1674160898.617992873] [robot_state_publisher]: got segment rl_wheel_link
rosbot-bringup-rosbot-1 | [robot_state_publisher-1] [INFO] [1674160898.618020299] [robot_state_publisher]: got segment rplidar_a2_link
rosbot-bringup-rosbot-1 | [robot_state_publisher-1] [INFO] [1674160898.618048151] [robot_state_publisher]: got segment rr_range
rosbot-bringup-rosbot-1 | [robot_state_publisher-1] [INFO] [1674160898.618075039] [robot_state_publisher]: got segment rr_wheel_link
rosbot-bringup-rosbot-1 | [ros2_control_node-2] [INFO] [1674160898.751824588] [resource_manager]: Successful initialization of hardware ‘imu’
rosbot-bringup-rosbot-1 | [ros2_control_node-2] [INFO] [1674160898.752225770] [resource_manager]: Loading hardware ‘wheels’
rosbot-bringup-rosbot-1 | [ros2_control_node-2] [INFO] [1674160898.753269501] [resource_manager]: Initialize hardware ‘wheels’
rosbot-bringup-rosbot-1 | [ros2_control_node-2] [INFO] [1674160898.753456296] [RosbotSystem]: Initializing
rosbot-bringup-rosbot-1 | [ros2_control_node-2] [INFO] [1674160898.753787052] [RosbotSystem]: Joint ‘fl_wheel_joint’ found
rosbot-bringup-rosbot-1 | [ros2_control_node-2] [INFO] [1674160898.754029457] [RosbotSystem]: Joint ‘fr_wheel_joint’ found
rosbot-bringup-rosbot-1 | [ros2_control_node-2] [INFO] [1674160898.754138586] [RosbotSystem]: Joint ‘rl_wheel_joint’ found
rosbot-bringup-rosbot-1 | [ros2_control_node-2] [INFO] [1674160898.754177271] [RosbotSystem]: Joint ‘rr_wheel_joint’ found
rosbot-bringup-rosbot-1 | [ros2_control_node-2] [INFO] [1674160898.804752165] [resource_manager]: Successful initialization of hardware ‘wheels’
rosbot-bringup-rosbot-1 | [ros2_control_node-2] [INFO] [1674160898.805307086] [resource_manager]: ‘configure’ hardware ‘imu’
rosbot-bringup-rosbot-1 | [ros2_control_node-2] [INFO] [1674160898.805396585] [RosbotImuSensor]: Configuring
rosbot-bringup-rosbot-1 | [ros2_control_node-2] [INFO] [1674160898.805427474] [resource_manager]: Successful ‘configure’ of hardware ‘imu’
rosbot-bringup-rosbot-1 | [ros2_control_node-2] [INFO] [1674160898.805456307] [resource_manager]: ‘activate’ hardware ‘imu’
rosbot-bringup-rosbot-1 | [ros2_control_node-2] [INFO] [1674160898.805478899] [RosbotImuSensor]: Activating
rosbot-bringup-rosbot-1 | [ros2_control_node-2] [WARN] [1674160898.822775965] [RosbotImuSensor]: Feedback message from imu wasn’t received yet
rosbot-bringup-rosbot-1 | [ros2_control_node-2] [WARN] [1674160899.323068483] [RosbotImuSensor]: Feedback message from imu wasn’t received yet
rosbot-bringup-rosbot-1 | [ros2_control_node-2] [INFO] [1674160899.323266333] [resource_manager]: Successful ‘activate’ of hardware ‘imu’
rosbot-bringup-rosbot-1 | [ros2_control_node-2] [INFO] [1674160899.323329332] [resource_manager]: ‘configure’ hardware ‘wheels’
rosbot-bringup-rosbot-1 | [ros2_control_node-2] [INFO] [1674160899.323359054] [RosbotSystem]: Configuring
rosbot-bringup-rosbot-1 | [ros2_control_node-2] [INFO] [1674160899.323382962] [resource_manager]: Successful ‘configure’ of hardware ‘wheels’
rosbot-bringup-rosbot-1 | [ros2_control_node-2] [INFO] [1674160899.323415202] [resource_manager]: ‘activate’ hardware ‘wheels’
rosbot-bringup-rosbot-1 | [ros2_control_node-2] [INFO] [1674160899.323437461] [RosbotSystem]: Activating
rosbot-bringup-rosbot-1 | [ros2_control_node-2] [WARN] [1674160899.344813120] [RosbotSystem]: Feedback message from motors wasn’t received yet
rosbot-bringup-rosbot-1 | [spawner-4] [INFO] [1674160899.581904610] [spawner_joint_state_broadcaster]: Waiting for ‘/controller_manager’ services to be available
rosbot-bringup-rosbot-1 | [ros2_control_node-2] [WARN] [1674160899.845058106] [RosbotSystem]: Feedback message from motors wasn’t received yet
rosbot-bringup-rosbot-1 | [ros2_control_node-2] [INFO] [1674160899.845209642] [resource_manager]: Successful ‘activate’ of hardware ‘wheels’
rosbot-bringup-rosbot-1 | [ros2_control_node-2] [INFO] [1674160899.891975146] [controller_manager]: update rate is 20 Hz
rosbot-bringup-rosbot-1 | [ros2_control_node-2] [INFO] [1674160899.895527781] [controller_manager]: RT kernel is recommended for better performance
rosbot-bringup-rosbot-1 | [ros2_control_node-2] [INFO] [1674160900.035816034] [controller_manager]: Loading controller ‘joint_state_broadcaster’
rosbot-bringup-rosbot-1 | [spawner-4] [INFO] [1674160900.101663183] [spawner_joint_state_broadcaster]: Loaded joint_state_broadcaster
rosbot-bringup-rosbot-1 | [ros2_control_node-2] [INFO] [1674160900.110987821] [controller_manager]: Configuring controller ‘joint_state_broadcaster’
rosbot-bringup-rosbot-1 | [ros2_control_node-2] [INFO] [1674160900.111401077] [joint_state_broadcaster]: ‘joints’ or ‘interfaces’ parameter is empty. All available state interfaces will be published
rosbot-bringup-rosbot-1 | [spawner-4] [INFO] [1674160900.202394258] [spawner_joint_state_broadcaster]: Configured and activated joint_state_broadcaster
rosbot-bringup-rosbot-1 | [INFO] [spawner-4]: process has finished cleanly [pid 66]
rosbot-bringup-rosbot-1 | [INFO] [spawner-5]: process started with pid [124]
rosbot-bringup-rosbot-1 | [ros2_control_node-2] [INFO] [1674160901.209652239] [controller_manager]: Loading controller ‘rosbot_base_controller’
rosbot-bringup-rosbot-1 | [spawner-5] [INFO] [1674160901.425312694] [spawner_rosbot_base_controller]: Loaded rosbot_base_controller
rosbot-bringup-rosbot-1 | [ros2_control_node-2] [INFO] [1674160901.432754534] [controller_manager]: Configuring controller ‘rosbot_base_controller’
rosbot-bringup-rosbot-1 | [spawner-5] [INFO] [1674160901.602151793] [spawner_rosbot_base_controller]: Configured and activated rosbot_base_controller
rosbot-bringup-rosbot-1 | [INFO] [spawner-5]: process has finished cleanly [pid 124]
rosbot-bringup-rosbot-1 | [INFO] [spawner-6]: process started with pid [138]
rosbot-bringup-rosbot-1 | [ros2_control_node-2] [INFO] [1674160902.784197248] [controller_manager]: Loading controller ‘imu_broadcaster’
rosbot-bringup-rosbot-1 | [spawner-6] [INFO] [1674160902.922581344] [spawner_imu_broadcaster]: Loaded imu_broadcaster
rosbot-bringup-rosbot-1 | [ros2_control_node-2] [INFO] [1674160902.929728187] [controller_manager]: Configuring controller ‘imu_broadcaster’
rosbot-bringup-rosbot-1 | [spawner-6] [INFO] [1674160903.054748200] [spawner_imu_broadcaster]: Configured and activated imu_broadcaster
rosbot-bringup-rosbot-1 | [INFO] [spawner-6]: process has finished cleanly [pid 138]
ON THE HOST PC
jcoco@lemurpro:~$ ros2 topic echo /scan
header:
stamp:
sec: 1674161499
nanosec: 427968503
frame_id: laser
angle_min: -3.1241390705108643
angle_max: 3.1415927410125732
angle_increment: 0.01745329238474369
time_increment: 0.0003178311453666538
scan_time: 0.11410138010978699
range_min: 0.15000000596046448
range_max: 16.0
ranges:
-
.inf
-
0.12925000488758087
-
0.12925000488758087
-
.inf
-
0.12925000488758087
-
.inf
-
0.12974999845027924
-
.inf
-
0.13050000369548798
-
.inf
-
0.13124999403953552
-
.inf
-
0.13300000131130219
-
.inf
-
0.1354999989271164
-
.inf
-
0.1392499953508377
-
.inf
-
.inf
-
.inf
-
.inf
-
.inf
-
.inf
-
.inf
-
.inf
-
.inf
-
.inf
-
.inf
-
.inf
-
.inf
-
.inf
-
.inf
-
.inf
-
.inf
-
.inf
-
.inf
-
.inf
-
.inf
-
.inf
-
.inf
-
.inf
-
.inf
-
.inf
-
.inf
-
.inf
-
.inf
-
.inf
-
.inf
-
.inf
-
.inf
-
.inf
-
.inf
-
.inf
-
.inf
-
.inf
-
.inf
-
.inf
-
.inf
-
.inf
-
.inf
-
.inf
-
.inf
-
.inf
-
.inf
-
.inf
-
.inf
-
.inf
-
.inf
-
.inf
-
.inf
-
.inf
-
.inf
-
.inf
-
.inf
-
.inf
-
.inf
-
.inf
-
.inf
-
.inf
-
.inf
-
.inf
-
.inf
-
.inf
-
.inf
-
.inf
-
.inf
-
0.15199999511241913
-
.inf
-
0.15125000476837158
-
.inf
-
0.1509999930858612
-
.inf
-
0.1509999930858612
-
.inf
-
0.15074999630451202
-
.inf
-
0.1509999930858612
-
.inf
-
0.15125000476837158
-
.inf
-
0.15174999833106995
-
.inf
-
0.1525000035762787
-
.inf
-
0.1535000056028366
-
.inf
-
0.1547500044107437
-
.inf
-
0.15600000321865082
-
.inf
-
0.1577499955892563
-
.inf
-
0.15974999964237213
-
0.16200000047683716
-
.inf
-
0.16425000131130219
-
.inf
-
0.16725000739097595
-
.inf
-
0.1704999953508377
-
.inf
-
0.17374999821186066
-
.inf
-
.inf
-
0.17749999463558197
-
.inf
-
0.18174999952316284
-
.inf
-
‘…’
intensities: -
0.0
-
15.0
-
15.0
-
0.0
-
15.0
-
0.0
-
15.0
-
0.0
-
15.0
-
0.0
-
15.0
-
0.0
-
15.0
-
0.0
-
15.0
-
0.0
-
15.0
-
0.0
-
0.0
-
0.0
-
0.0
-
0.0
-
0.0
-
0.0
-
0.0
-
0.0
-
0.0
-
0.0
-
0.0
-
0.0
-
0.0
-
0.0
-
0.0
-
0.0
-
0.0
-
0.0
-
0.0
-
0.0
-
0.0
-
0.0
-
0.0
-
0.0
-
0.0
-
0.0
-
0.0
-
0.0
-
0.0
-
0.0
-
0.0
-
0.0
-
0.0
-
0.0
-
0.0
-
0.0
-
0.0
-
0.0
-
0.0
-
0.0
-
0.0
-
0.0
-
0.0
-
0.0
-
0.0
-
0.0
-
0.0
-
0.0
-
0.0
-
0.0
-
0.0
-
0.0
-
0.0
-
0.0
-
0.0
-
0.0
-
0.0
-
0.0
-
0.0
-
0.0
-
0.0
-
0.0
-
0.0
-
0.0
-
0.0
-
0.0
-
0.0
-
0.0
-
15.0
-
0.0
-
15.0
-
0.0
-
15.0
-
0.0
-
15.0
-
0.0
-
15.0
-
0.0
-
15.0
-
0.0
-
15.0
-
0.0
-
15.0
-
0.0
-
15.0
-
0.0
-
15.0
-
0.0
-
15.0
-
0.0
-
15.0
-
0.0
-
15.0
-
0.0
-
15.0
-
15.0
-
0.0
-
15.0
-
0.0
-
15.0
-
0.0
-
15.0
-
0.0
-
15.0
-
0.0
-
0.0
-
15.0
-
0.0
-
15.0
-
0.0
-
‘…’
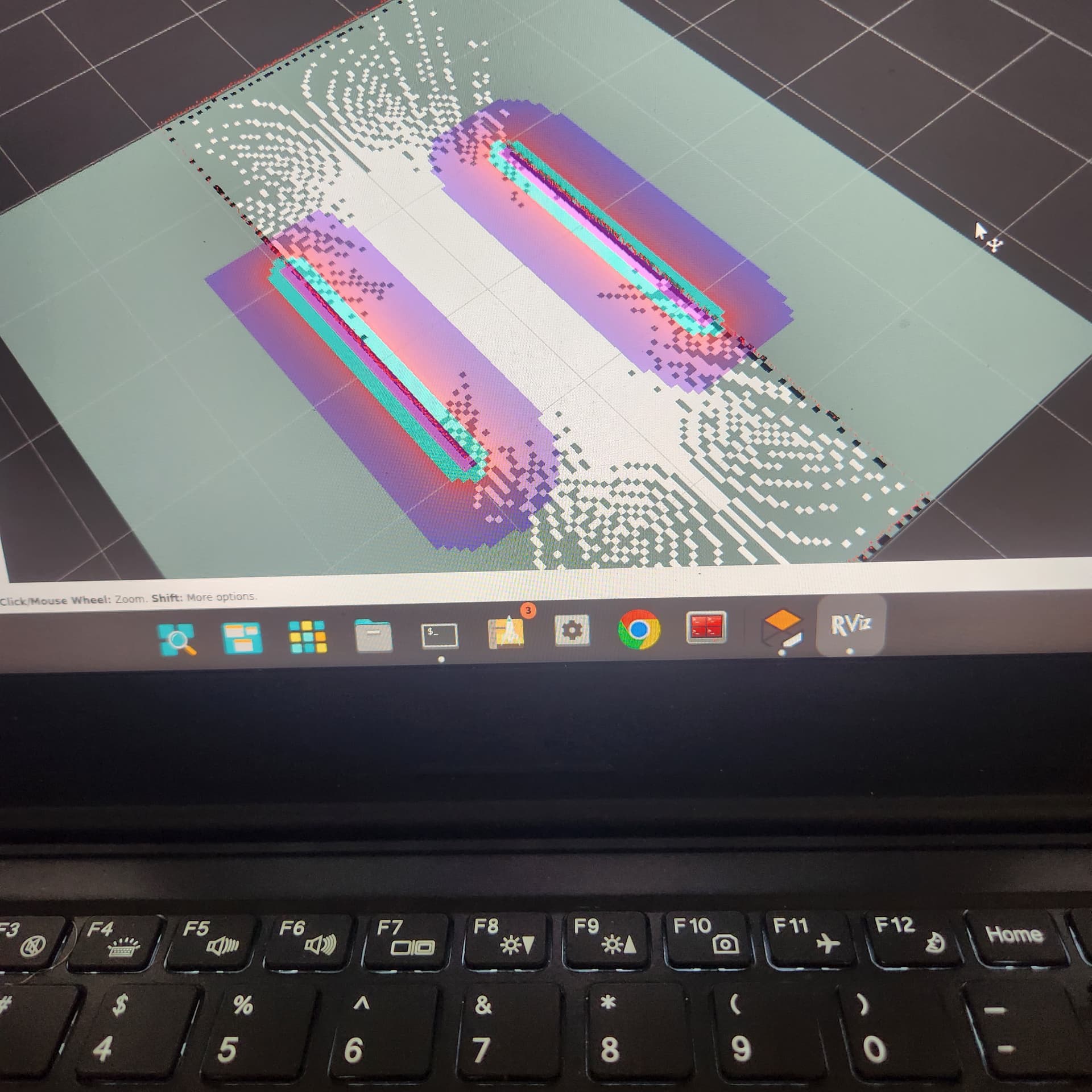
I also show the terminal output of the scan. Any suggestions would be appreciated.
My ROSbot2R is sitting on a table within close proximity to an object in front of it and to it’s left. Open space behind and to the right.
Joe