Hello,
long story short, after about a dozen minutes the /scan topic stops being published. Then sometime retsart a dozen minutes later but I lose /scan_filtered definitely
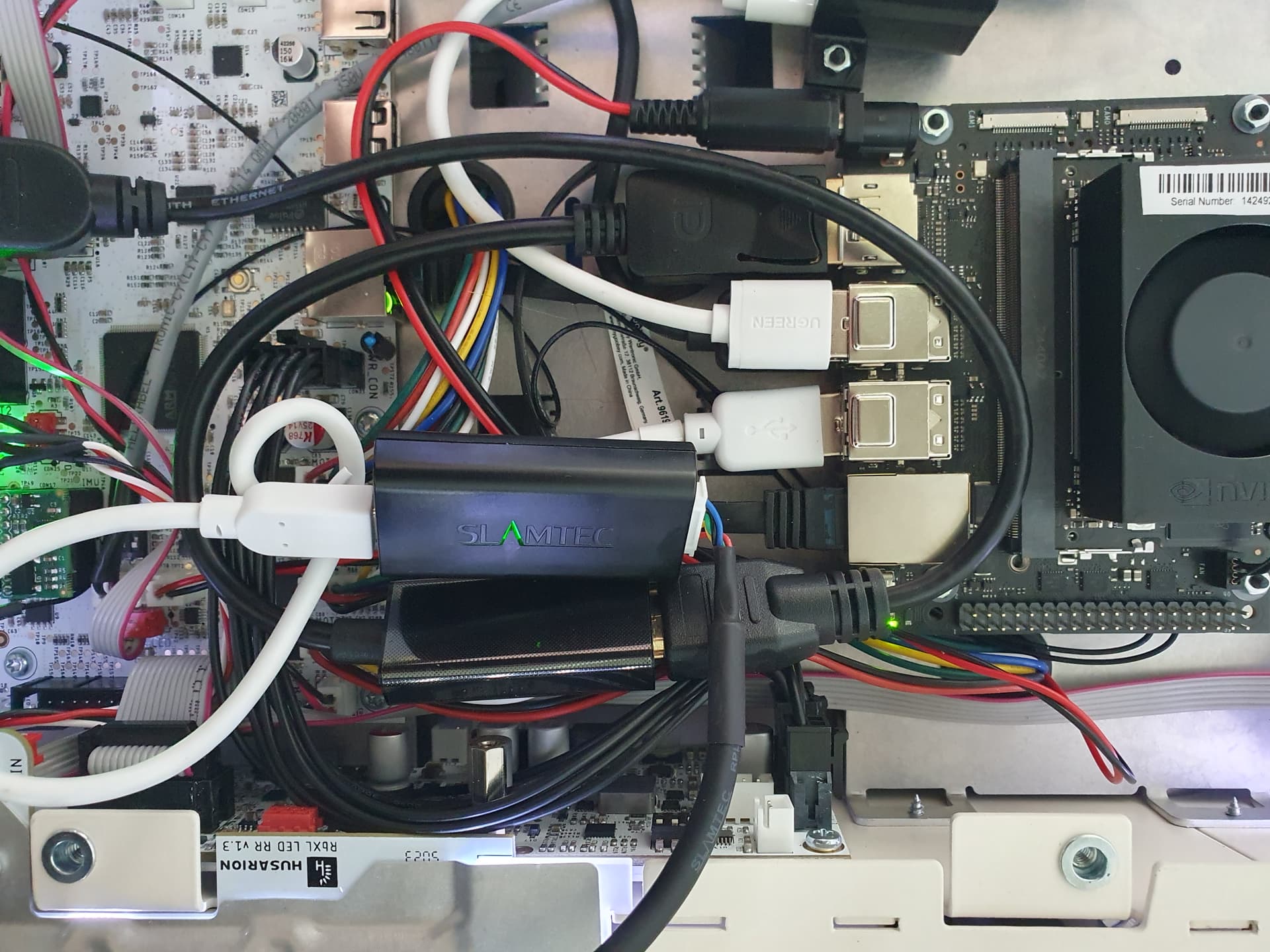
I have a Rosbot XL, on ubuntu 22.04 (humble) I use a Slamtec S2 and rosbot_xl with the following config and images:
rosbot-xl:
image: husarion/rosbot-xl:humble-0.11.5-20240614 #0.8.2-20230913
container_name: rosbot-xl
<<: *common-config
command: ros2 launch rosbot_xl_bringup bringup.launch.py lidar_model:='slamtec_rplidar_s2' mecanum:=${MECANUM:-True}
rplidar:
image: husarion/rplidar:humble
<<: *common-config
privileged: True
devices:
- /dev/ttyUSB1:/dev/ttyRPLIDAR
command: ros2 launch sllidar_ros2 sllidar_s2_launch.py serial_baudrate:=${LIDAR_BAUDRATE:-1000000} inverted:='false' serial_port:='/dev/ttyRPLIDAR'
Both rosbot-xl and husarion-rplidar-1 are considered “unhealthy” by docker, here are the logs:
Docker logs rosbot_xl
[ekf_node-5] Failed to meet update rate! Took 16.410924095999998684seconds. Try decreasing the rate, limiting sensor output frequency, or limiting the number of sensors.
[ekf_node-5] Failed to meet update rate! Took 24.260967296000000459seconds. Try decreasing the rate, limiting sensor output frequency, or limiting the number of sensors.
[ekf_node-5] Failed to meet update rate! Took 16.295909760000000688seconds. Try decreasing the rate, limiting sensor output frequency, or limiting the number of sensors.
[ekf_node-5] Failed to meet update rate! Took 13.185206816000000885seconds. Try decreasing the rate, limiting sensor output frequency, or limiting the number of sensors.
[ekf_node-5] Failed to meet update rate! Took 6.8889963200000003951seconds. Try decreasing the rate, limiting sensor output frequency, or limiting the number of sensors.
[ekf_node-5] Failed to meet update rate! Took 4.510549024000000351seconds. Try decreasing the rate, limiting sensor output frequency, or limiting the number of sensors.
[ekf_node-5] Failed to meet update rate! Took 5.5649965440000004335seconds. Try decreasing the rate, limiting sensor output frequency, or limiting the number of sensors.
for husarion_rplidar_1
[sllidar_node-1] [INFO] [1747038801.409811384] [sllidar_node]: SLLidar running on ROS2 package SLLidar.ROS2 SDK Version:1.0.1, SLLIDAR SDK Version:2.1.0
[sllidar_node-1] [INFO] [1747038801.430050616] [sllidar_node]: SLLidar S/N: AA32E18BC7E49CCDA3EB9AF43EEF4C73
[sllidar_node-1] [INFO] [1747038801.430168312] [sllidar_node]: Firmware Ver: 1.02
[sllidar_node-1] [INFO] [1747038801.430200216] [sllidar_node]: Hardware Rev: 18
[sllidar_node-1] [INFO] [1747038801.432086616] [sllidar_node]: SLLidar health status : 0
[sllidar_node-1] [INFO] [1747038801.432175000] [sllidar_node]: SLLidar health status : OK.
[sllidar_node-1] [INFO] [1747038801.600701848] [sllidar_node]: current scan mode: DenseBoost, sample rate: 32 Khz, max_distance: 18.0 m, scan frequency:10.0 Hz,
I still receive /odometry_filtered but /scan vanishes from time to time over a couple to a dozen minutes, no log helps me figure out why. the USB is still detected and still the same name.
It is not usable as it is for navigation right now.
My supposition so far is that the lidar request too much current to the jetson Orin Nano? But that is something you would not have overlooked while conceiving the robot.
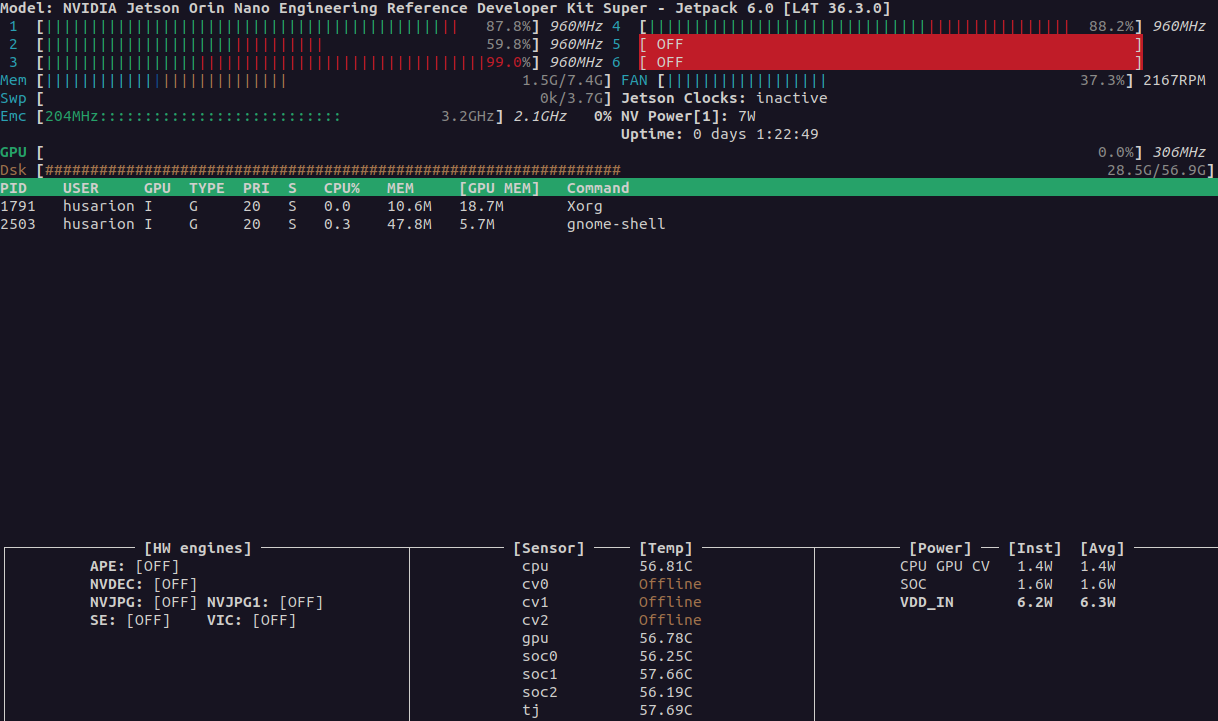
I checked with top, the CPU is used at 20%, however there are boot of heavy lagging when sending commands to the robot. The jetson is using 15W
The robot serial number is: 4ade2c