I have a problem with the map created from SLAM Toolbox. It stays frozen even though the ROSBot 2R moves. It seems that SLAM Toolbox map not updating in ROS 2 and there are no clear errors, TF and topics seem fine. I noticed that map frame in rviz2 stays also frozen.
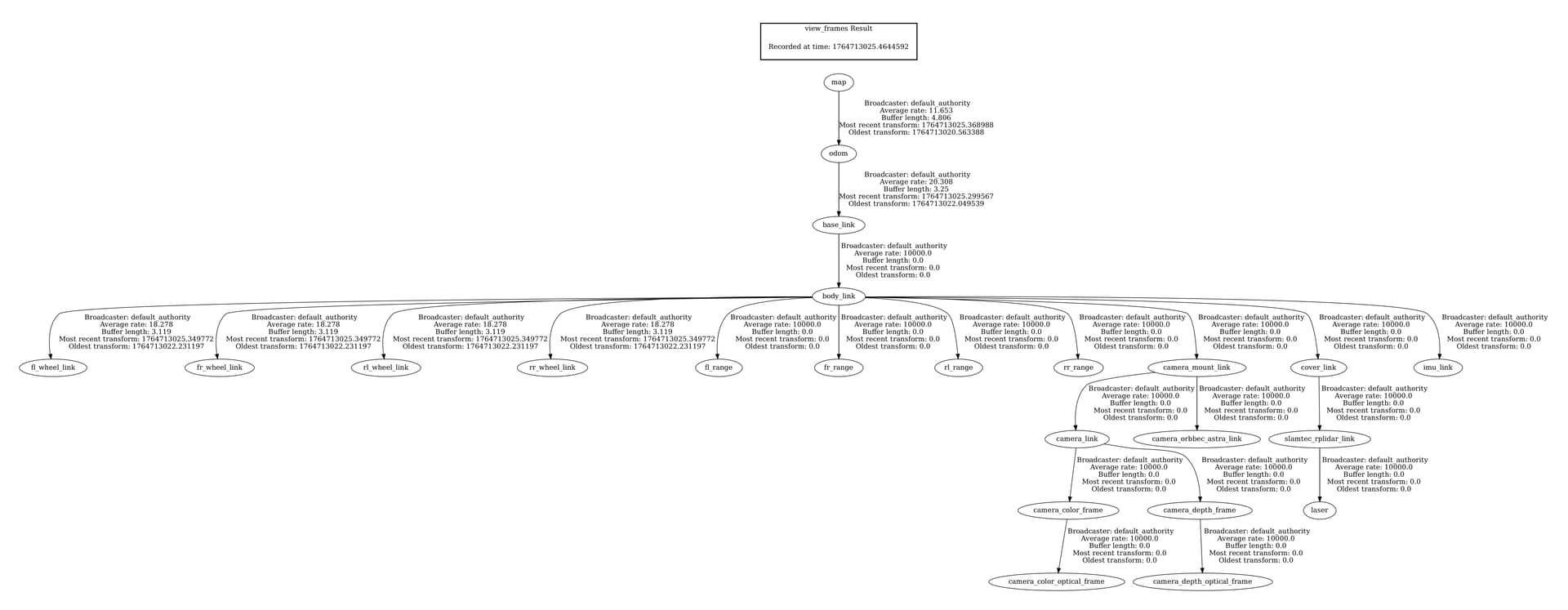
I got the following tree:
Hi @RafalGorecki
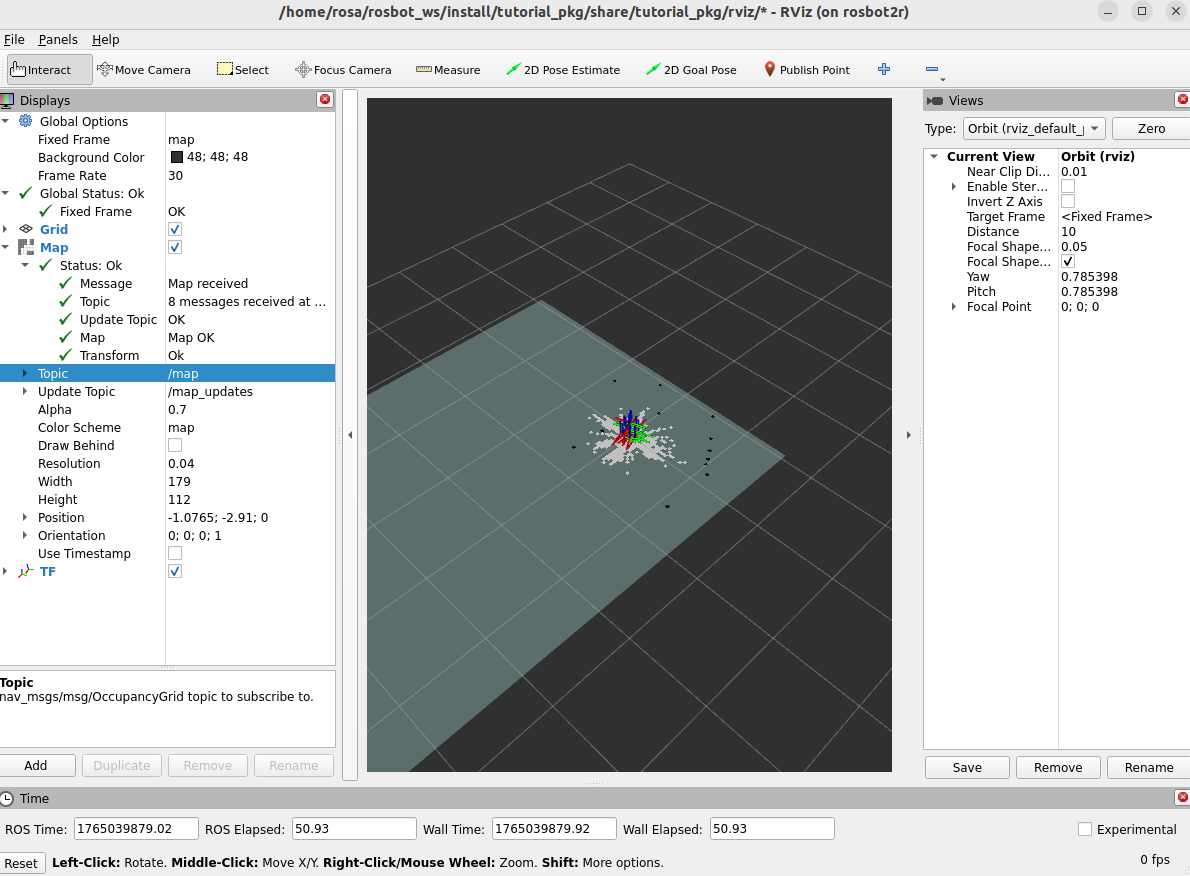
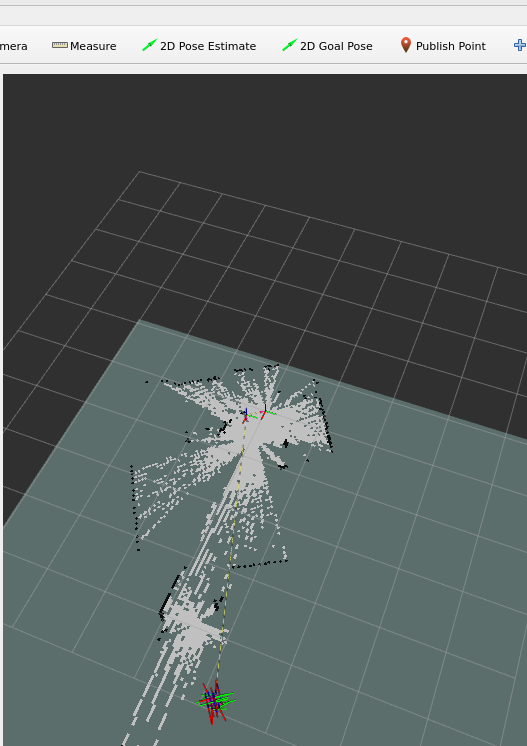
in the 2 photos below you can see at the first image the start location, where the robot started. Then i drove the robot a bit but as you can notice the map does not update, since the TF updates but map not. Before the map could not update at all. But after i changed the mod of the Lidar to “Standard” i got this. But still messy. I should mention here that the LIdar works very fine and deliver the data very good.
Hello @RafalGorecki
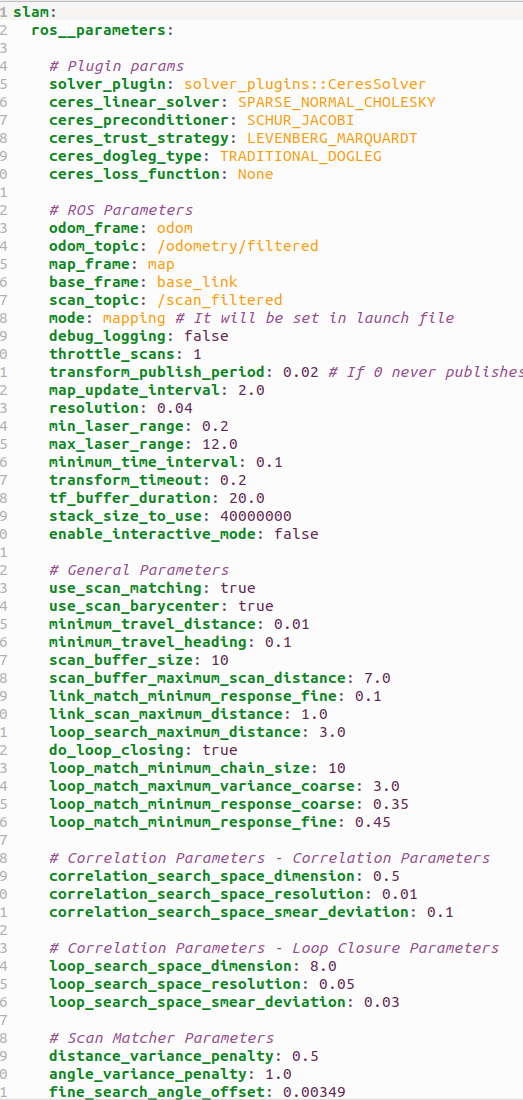
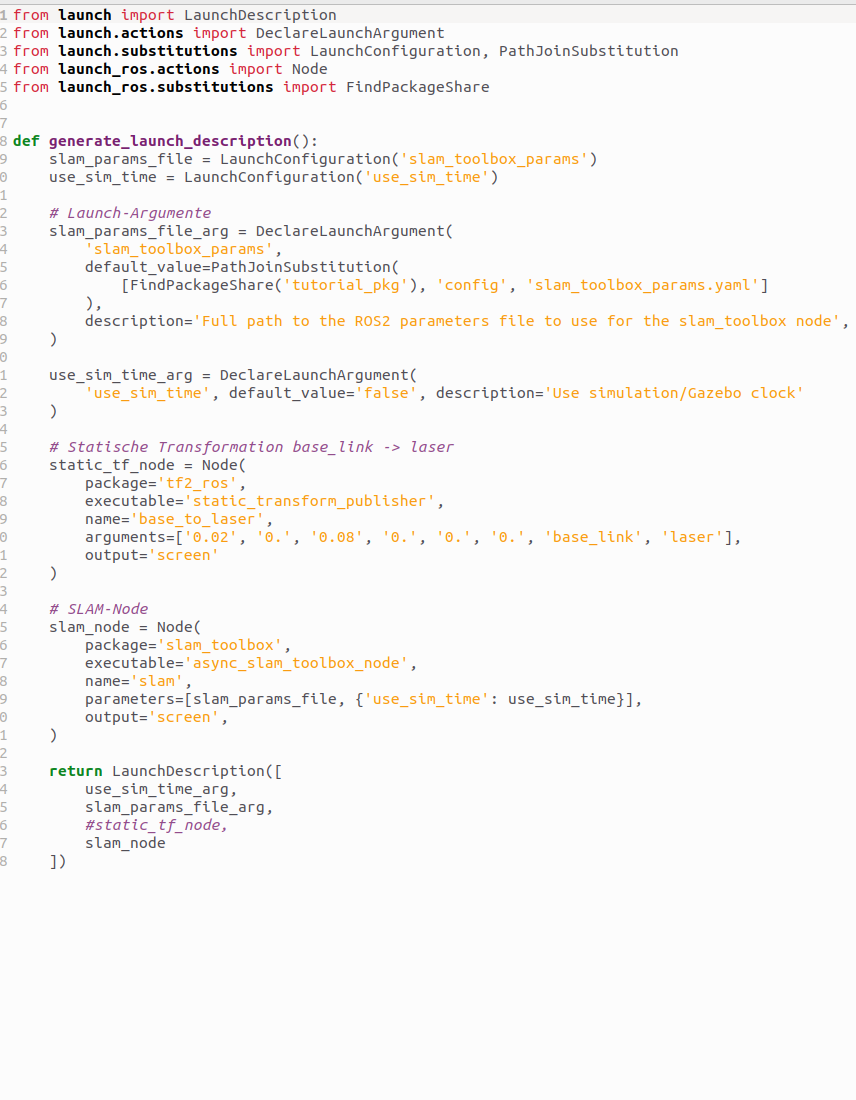
i built the rosbot driver from the git repo GitHub - husarion/rosbot_ros at humble and then i added to it in /src file the rplidar git repo GitHub - Slamtec/rplidar_ros at ros2 . SLAM Toolbox ist installed and configured like above mentioned. The lidar delivers permanent scan data.
I think there es a problem with TF. But i dont know how to solve this!
I really appreciate every help and support
Since I haven’t used ROS 2 Tutorials in over a year, that’s where this example came from. I haven’t been able to reproduce this error. Looking at the TF tree, everything looks fine. There’s both a map → base_link and a base_link → laser connection (which is in the /scan / /scan_filtered message).
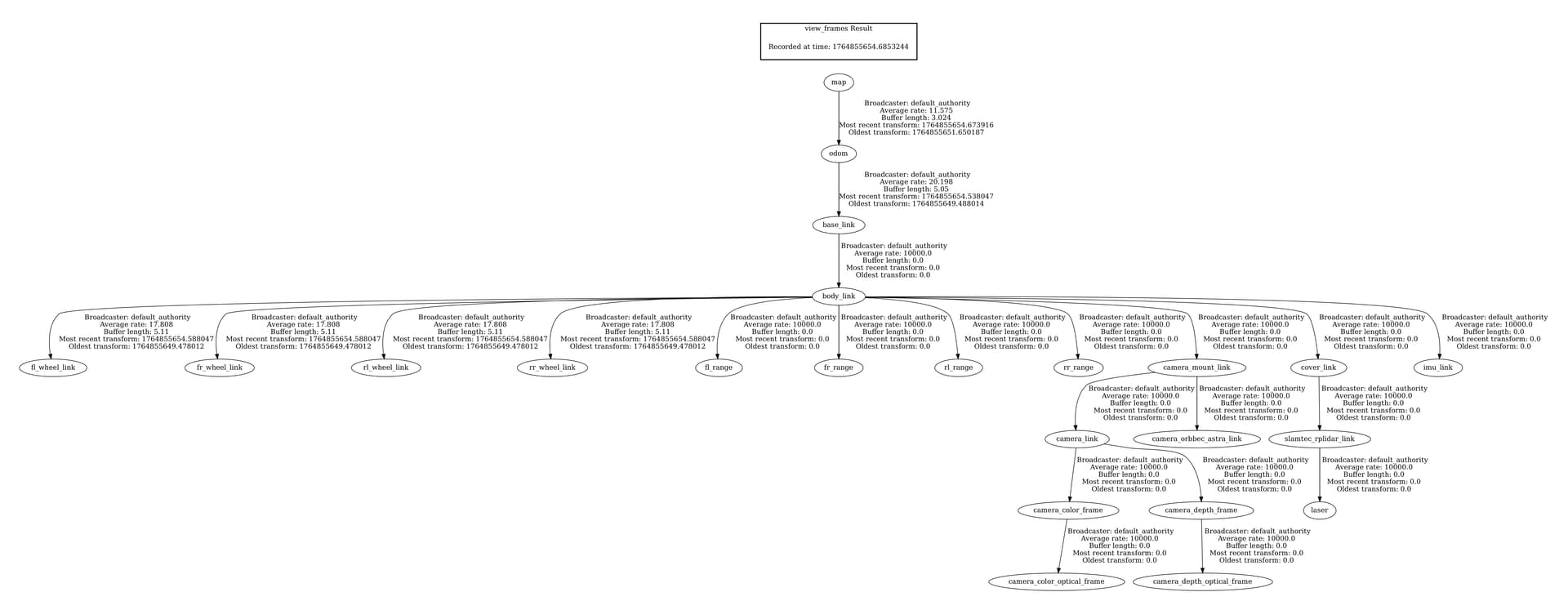
Looking at the screenshots, it looks like slam was updating for a while. I’m wondering if:
They’re all being run on the robot.
Is scan still publishing topics (ros2 topic echo /scan_filtered)
Are there devices on the LAN with a different ROS distribution?
of course everything was running on the real robot. And yes, scan is still publishing topics correctly!!
rosbot 2r is the only device with ros2 on the LAN
I wonder if the slam parameters are correct. So, how to get the correct slamt paramter for the rosbot 2r?
To make sure the parameters are loaded correctly, you can do this by executing ros2 param get /slam scan_topic. However, if there was something wrong with the configuration, I don’t expect it would only work for a moment and then stop
I can’t recreate it, at most I can take a look at the rosbag if you send it to me.