Hi,
I am trying to do multiple robots’ map navigation by namespace, but now is stucked by several erros! I’d like to get your help!
The main errors are
No laser scan received......Verify that data is being published on the /rb2p_0/scan topicMessageFilter [target=/rb2p_0/odom ]: Dropped 100.00% ......
Here is my launch file,
<launch>
<arg name="robot_namespace" default="rb2p_0"/>
<arg name="use_rviz" default="true"/>
<arg name="map_file" default="$(find tutorial_pkg)/maps/map01/map.yaml"/> <!-- path of map file -->
<node name="map_server" pkg="map_server" type="map_server" args="$(arg map_file)" respawn="true" />
<group ns="$(arg robot_namespace)">
<node name="robot_state_publisher" pkg="robot_state_publisher" type="state_publisher" output="screen"/
<node pkg="tf" type="static_transform_publisher" name="ROSbot_laser" args="0 0 0 3.14 0 0 base_link laser 100" output="screen"/>
<include file="$(find rplidar_ros)/launch/rplidar_a3.launch"></include>
<include file="$(find rosbot_ekf)/launch/all.launch">
<arg name="rosbot_pro" value="true"/>
</include>
<node pkg="move_base" type="move_base" name="move_base" output="log">
<param name="controller_frequency" value="10.0" />
<rosparam file="$(find tutorial_pkg)/config/costmap_common_params.yaml" command="load" ns="global_costmap" />
<rosparam file="$(find tutorial_pkg)/config/costmap_common_params.yaml" command="load" ns="local_costmap" />
<rosparam file="$(find tutorial_pkg)/config/local_costmap_params.yaml" command="load" />
<rosparam file="$(find tutorial_pkg)/config/global_costmap_params.yaml" command="load" />
<rosparam file="$(find tutorial_pkg)/config/trajectory_planner.yaml" command="load" />
<param name="global_costmap/global_frame" value="map"/>
<param name="global_costmap/laser_scan_sensor/topic" value="$(arg robot_namespace)/scan"/>
<param name="local_costmap/global_frame" value="map"/>
<param name="local_costmap/laser_scan_sensor/topic" value="$(arg robot_namespace)/scan"/>
<param name="local_costmap/robot_base_frame" value="$(arg robot_namespace)/base_footprint"/>
<remap from="map" to="/map"/>
</node>
<node pkg="amcl" type="amcl" name="amcl" output="screen">
<remap from="scan" to="/rb2p_0/scan"/>
<remap from="static_map" to="/static_map"/>
<remap from="map" to="/map"/>
<param name="odom_frame_id" value="/rb2p_0/odom"/>
<param name="base_frame_id" value="/rb2p_0/base_link"/>
<param name="global_frame_id" value="/map"/>
<param name="odom_model_type" value="diff-corrected"/>
<param name="update_min_d" value="0.1"/>
<param name="update_min_a" value="0.2"/>
<param name="min_particles" value="500"/>
<param name="tf_broadcast" value="true" />
<param name="initial_pose_x" value="0.0"/>
<param name="initial_pose_y" value="0.0"/>
<param name="initial_pose_a" value="0.0"/>
</node>
</group>
<param name="robot_description" command="$(find xacro)/xacro.py '$(find rosbot_description)/urdf/rosbot.xacro'"/>
<!-- Show in Rviz -->
<!--<node if="$(arg use_rviz)" name="rviz" pkg="rviz" type="rviz" args="-d $(find rosbot_description)/rviz/rosbot.rviz" required="true" output="screen"/>-->
<node if="$(arg use_rviz)" name="rviz" pkg="rviz" type="rviz" output="screen" />
</launch>
Here is the terminal output of my launch file,
... logging to /home/husarion/.ros/log/e0e6ca24-e8d8-11ea-8e55-000c292d3725/roslaunch-husarion-8511.log
Checking log directory for disk usage. This may take awhile.
Press Ctrl-C to interrupt
Done checking log file disk usage. Usage is <1GB.
xacro: Traditional processing is deprecated. Switch to --inorder processing!
To check for compatibility of your document, use option --check-order.
For more infos, see http://wiki.ros.org/xacro#Processing_Order
xacro.py is deprecated; please use xacro instead
started roslaunch server http://192.168.3.154:38147/
SUMMARY
========
CLEAR PARAMETERS
* /rb2p_0/rosbot_ekf/
PARAMETERS
* /rb2p_0/amcl/base_frame_id: /rb2p_0/base_link
* /rb2p_0/amcl/global_frame_id: /map
* /rb2p_0/amcl/initial_pose_a: 0.0
* /rb2p_0/amcl/initial_pose_x: 0.0
* /rb2p_0/amcl/initial_pose_y: 0.0
* /rb2p_0/amcl/min_particles: 500
* /rb2p_0/amcl/odom_frame_id: /rb2p_0/odom
* /rb2p_0/amcl/odom_model_type: diff-corrected
* /rb2p_0/amcl/tf_broadcast: True
* /rb2p_0/amcl/update_min_a: 0.2
* /rb2p_0/amcl/update_min_d: 0.1
* /rb2p_0/move_base/TrajectoryPlannerROS/acc_lim_Y: 1.5
* /rb2p_0/move_base/TrajectoryPlannerROS/acc_lim_theta: 5.0
* /rb2p_0/move_base/TrajectoryPlannerROS/acc_lim_x: 1.5
* /rb2p_0/move_base/TrajectoryPlannerROS/holonomic_robot: False
* /rb2p_0/move_base/TrajectoryPlannerROS/max_vel_theta: 2.5
* /rb2p_0/move_base/TrajectoryPlannerROS/max_vel_x: 0.1
* /rb2p_0/move_base/TrajectoryPlannerROS/meter_scoring: True
* /rb2p_0/move_base/TrajectoryPlannerROS/min_in_place_vel_theta: 0.25
* /rb2p_0/move_base/TrajectoryPlannerROS/min_vel_theta: -2.5
* /rb2p_0/move_base/TrajectoryPlannerROS/min_vel_x: 0.01
* /rb2p_0/move_base/TrajectoryPlannerROS/xy_goal_tolerance: 0.1
* /rb2p_0/move_base/TrajectoryPlannerROS/yaw_goal_tolerance: 0.05
* /rb2p_0/move_base/controller_frequency: 10.0
* /rb2p_0/move_base/global_costmap/always_send_full_costmap: True
* /rb2p_0/move_base/global_costmap/footprint: [[0.12, 0.14], [0...
* /rb2p_0/move_base/global_costmap/global_frame: map
* /rb2p_0/move_base/global_costmap/height: 15
* /rb2p_0/move_base/global_costmap/inflation_radius: 2.5
* /rb2p_0/move_base/global_costmap/laser_scan_sensor/clearing: True
* /rb2p_0/move_base/global_costmap/laser_scan_sensor/data_type: LaserScan
* /rb2p_0/move_base/global_costmap/laser_scan_sensor/marking: True
* /rb2p_0/move_base/global_costmap/laser_scan_sensor/sensor_frame: laser
* /rb2p_0/move_base/global_costmap/laser_scan_sensor/topic: rb2p_0/scan
* /rb2p_0/move_base/global_costmap/map_topic: /map
* /rb2p_0/move_base/global_costmap/observation_sources: laser_scan_sensor
* /rb2p_0/move_base/global_costmap/obstacle_range: 6.0
* /rb2p_0/move_base/global_costmap/origin_x: -7.5
* /rb2p_0/move_base/global_costmap/origin_y: -7.5
* /rb2p_0/move_base/global_costmap/publish_frequency: 2.5
* /rb2p_0/move_base/global_costmap/raytrace_range: 8.5
* /rb2p_0/move_base/global_costmap/resolution: 0.01
* /rb2p_0/move_base/global_costmap/robot_base_frame: base_link
* /rb2p_0/move_base/global_costmap/rolling_window: True
* /rb2p_0/move_base/global_costmap/static_map: False
* /rb2p_0/move_base/global_costmap/subscribe_to_updates: True
* /rb2p_0/move_base/global_costmap/transform_tolerance: 0.5
* /rb2p_0/move_base/global_costmap/update_frequency: 2.5
* /rb2p_0/move_base/global_costmap/width: 15
* /rb2p_0/move_base/local_costmap/always_send_full_costmap: True
* /rb2p_0/move_base/local_costmap/footprint: [[0.12, 0.14], [0...
* /rb2p_0/move_base/local_costmap/global_frame: map
* /rb2p_0/move_base/local_costmap/height: 3
* /rb2p_0/move_base/local_costmap/inflation_radius: 1.0
* /rb2p_0/move_base/local_costmap/laser_scan_sensor/clearing: True
* /rb2p_0/move_base/local_costmap/laser_scan_sensor/data_type: LaserScan
* /rb2p_0/move_base/local_costmap/laser_scan_sensor/marking: True
* /rb2p_0/move_base/local_costmap/laser_scan_sensor/sensor_frame: laser
* /rb2p_0/move_base/local_costmap/laser_scan_sensor/topic: rb2p_0/scan
* /rb2p_0/move_base/local_costmap/map_topic: /map
* /rb2p_0/move_base/local_costmap/observation_sources: laser_scan_sensor
* /rb2p_0/move_base/local_costmap/obstacle_range: 6.0
* /rb2p_0/move_base/local_costmap/origin_x: -1.5
* /rb2p_0/move_base/local_costmap/origin_y: -1.5
* /rb2p_0/move_base/local_costmap/publish_frequency: 5
* /rb2p_0/move_base/local_costmap/raytrace_range: 8.5
* /rb2p_0/move_base/local_costmap/resolution: 0.01
* /rb2p_0/move_base/local_costmap/robot_base_frame: rb2p_0/base_footp...
* /rb2p_0/move_base/local_costmap/rolling_window: True
* /rb2p_0/move_base/local_costmap/static_map: False
* /rb2p_0/move_base/local_costmap/subscribe_to_updates: True
* /rb2p_0/move_base/local_costmap/transform_tolerance: 0.25
* /rb2p_0/move_base/local_costmap/update_frequency: 5
* /rb2p_0/move_base/local_costmap/width: 3
* /rb2p_0/rosbot_ekf/acceleration_gains: [0.8, 0.0, 0.0, 0...
* /rb2p_0/rosbot_ekf/acceleration_limits: [1.3, 0.0, 0.0, 0...
* /rb2p_0/rosbot_ekf/base_link_frame: base_link
* /rb2p_0/rosbot_ekf/control_config: [True, False, Fal...
* /rb2p_0/rosbot_ekf/control_timeout: 0.2
* /rb2p_0/rosbot_ekf/debug: False
* /rb2p_0/rosbot_ekf/debug_out_file: /path/to/debug/fi...
* /rb2p_0/rosbot_ekf/deceleration_gains: [1.0, 0.0, 0.0, 0...
* /rb2p_0/rosbot_ekf/deceleration_limits: [1.3, 0.0, 0.0, 0...
* /rb2p_0/rosbot_ekf/frequency: 20
* /rb2p_0/rosbot_ekf/imu0: imu
* /rb2p_0/rosbot_ekf/imu0_config: [False, False, Fa...
* /rb2p_0/rosbot_ekf/imu0_differential: True
* /rb2p_0/rosbot_ekf/imu0_linear_acceleration_rejection_threshold: 0.8
* /rb2p_0/rosbot_ekf/imu0_nodelay: False
* /rb2p_0/rosbot_ekf/imu0_pose_rejection_threshold: 0.8
* /rb2p_0/rosbot_ekf/imu0_queue_size: 4
* /rb2p_0/rosbot_ekf/imu0_relative: True
* /rb2p_0/rosbot_ekf/imu0_remove_gravitational_acceleration: True
* /rb2p_0/rosbot_ekf/imu0_twist_rejection_threshold: 0.8
* /rb2p_0/rosbot_ekf/initial_estimate_covariance: ['1e-9', 0, 0, 0,...
* /rb2p_0/rosbot_ekf/map_frame: map
* /rb2p_0/rosbot_ekf/odom0: odom/wheel
* /rb2p_0/rosbot_ekf/odom0_config: [True, True, True...
* /rb2p_0/rosbot_ekf/odom0_differential: False
* /rb2p_0/rosbot_ekf/odom0_nodelay: False
* /rb2p_0/rosbot_ekf/odom0_queue_size: 6
* /rb2p_0/rosbot_ekf/odom0_relative: True
* /rb2p_0/rosbot_ekf/odom_frame: odom
* /rb2p_0/rosbot_ekf/print_diagnostics: True
* /rb2p_0/rosbot_ekf/process_noise_covariance: [0.05, 0, 0, 0, 0...
* /rb2p_0/rosbot_ekf/publish_acceleration: False
* /rb2p_0/rosbot_ekf/publish_tf: True
* /rb2p_0/rosbot_ekf/sensor_timeout: 0.2
* /rb2p_0/rosbot_ekf/stamped_control: False
* /rb2p_0/rosbot_ekf/transform_time_offset: 0.0
* /rb2p_0/rosbot_ekf/transform_timeout: 0.0
* /rb2p_0/rosbot_ekf/two_d_mode: False
* /rb2p_0/rosbot_ekf/use_control: True
* /rb2p_0/rosbot_ekf/world_frame: odom
* /rb2p_0/rplidarNode/angle_compensate: True
* /rb2p_0/rplidarNode/frame_id: laser
* /rb2p_0/rplidarNode/inverted: False
* /rb2p_0/rplidarNode/scan_mode: Sensitivity
* /rb2p_0/rplidarNode/serial_baudrate: 256000
* /rb2p_0/rplidarNode/serial_port: /dev/ttyUSB0
* /rb2p_0/serial_node/baud: 460800
* /rb2p_0/serial_node/port: /dev/ttyS4
* /robot_description: <?xml version="1....
* /rosdistro: kinetic
* /rosversion: 1.12.14
NODES
/
map_server (map_server/map_server)
/rb2p_0/
ROSbot_laser (tf/static_transform_publisher)
amcl (amcl/amcl)
imu_publisher (tf/static_transform_publisher)
move_base (move_base/move_base)
msgs_conversion (rosbot_ekf/msgs_conversion)
robot_state_publisher (robot_state_publisher/state_publisher)
rosbot_ekf (robot_localization/ekf_localization_node)
rplidarNode (rplidar_ros/rplidarNode)
serial_node (rosserial_python/serial_node.py)
ROS_MASTER_URI=http://192.168.3.118:11311
process[map_server-1]: started with pid [8523]
process[rb2p_0/robot_state_publisher-2]: started with pid [8524]
process[rb2p_0/ROSbot_laser-3]: started with pid [8525]
process[rb2p_0/rplidarNode-4]: started with pid [8529]
process[rb2p_0/serial_node-5]: started with pid [8533]
process[rb2p_0/msgs_conversion-6]: started with pid [8537]
process[rb2p_0/rosbot_ekf-7]: started with pid [8542]
[ WARN] [1598599249.712799992]: The 'state_publisher' executable is deprecated. Please use 'robot_state_publisher' instead
process[rb2p_0/imu_publisher-8]: started with pid [8548]
process[rb2p_0/move_base-9]: started with pid [8549]
[ WARN] [1598599249.774936948]: The root link base_link has an inertia specified in the URDF, but KDL does not support a root link with an inertia. As a workaround, you can add an extra dummy link to your URDF.
process[rb2p_0/amcl-10]: started with pid [8554]
[ INFO] [1598599250.344868972]: RPLIDAR running on ROS package rplidar_ros. SDK Version:1.12.0
[INFO] [1598599250.566457]: ROS Serial Python Node
[INFO] [1598599250.734879]: Connecting to /dev/ttyS4 at 460800 baud
RPLIDAR S/N: AFED9A87C5E392D2A5E492F83F38316C
[ INFO] [1598599250.850664055]: Firmware Ver: 1.27
[ INFO] [1598599250.850926479]: Hardware Rev: 6
[ INFO] [1598599250.852157453]: RPLidar health status : 0
[ INFO] [1598599251.545671910]: current scan mode: Sensitivity, max_distance: 25.0 m, Point number: 15.9K , angle_compensate: 4
[INFO] [1598599252.897957]: Note: publish buffer size is 768 bytes
[INFO] [1598599252.936415]: Setup service server on config [rosbot_ekf/Configuration]
[INFO] [1598599252.992718]: Setup publisher on battery [sensor_msgs/BatteryState]
[INFO] [1598599253.054957]: Setup publisher on pose [geometry_msgs/PoseStamped]
[INFO] [1598599253.111178]: Setup publisher on velocity [geometry_msgs/Twist]
[INFO] [1598599253.144720]: Setup publisher on range/fr [sensor_msgs/Range]
[INFO] [1598599253.170906]: Setup publisher on range/fl [sensor_msgs/Range]
[INFO] [1598599253.205902]: Setup publisher on range/rr [sensor_msgs/Range]
[INFO] [1598599253.236652]: Setup publisher on range/rl [sensor_msgs/Range]
[ INFO] [1598599253.241100668]: Requesting the map...
[INFO] [1598599253.269893]: Setup publisher on joint_states [sensor_msgs/JointState]
[INFO] [1598599253.292672]: Setup publisher on mpu9250 [rosbot_ekf/Imu]
[ INFO] [1598599253.315478300]: Received a 2016 X 3136 map @ 0.010 m/pix
[ WARN] [1598599253.315604331]: Frame_id of map received:'map' doesn't match global_frame_id:'/map'. This could cause issues with reading published topics
[INFO] [1598599253.327935]: Setup publisher on buttons [std_msgs/UInt8]
[INFO] [1598599253.332478]: Note: subscribe buffer size is 768 bytes
[INFO] [1598599253.373392]: Setup subscriber on cmd_vel [geometry_msgs/Twist]
[INFO] [1598599253.394368]:
______ _____ _____ _ _ __
| ___ \| _ |/ ___|| | | | / _|
| |_/ /| | | |\ `--. | |__ ___ | |_ | |_ __ __
| / | | | | `--. \| '_ \ / _ \ | __| | _|\ \ /\ / /
| |\ \ \ \_/ //\__/ /| |_) || (_) || |_ | | \ V V /
\_| \_| \___/ \____/ |_.__/ \___/ \__| |_| \_/\_/
Firmware version: 0.10.1
[ INFO] [1598599254.251238853]: Initializing likelihood field model; this can take some time on large maps...
[ INFO] [1598599257.110002896]: Done initializing likelihood field model.
[ WARN] [1598599275.036842212]: No laser scan received (and thus no pose updates have been published) for 1598599275.036584 seconds. Verify that data is being published on the /rb2p_0/scan topic.
[ WARN] [1598599275.037272628]: MessageFilter [target=/rb2p_0/odom ]: Dropped 100.00% of messages so far. Please turn the [ros.amcl.message_notifier] rosconsole logger to DEBUG for more information.
[ WARN] [1598599290.036587091]: No laser scan received (and thus no pose updates have been published) for 1598599290.036415 seconds. Verify that data is being published on the /rb2p_0/scan topic.
[ WARN] [1598599305.035991620]: No laser scan received (and thus no pose updates have been published) for 1598599305.035825 seconds. Verify that data is being published on the /rb2p_0/scan topic.
[ WARN] [1598599320.036676786]: No laser scan received (and thus no pose updates have been published) for 1598599320.036475 seconds. Verify that data is being published on the /rb2p_0/scan topic.
[ WARN] [1598599335.036540892]: No laser scan received (and thus no pose updates have been published) for 1598599335.036266 seconds. Verify that data is being published on the /rb2p_0/scan topic.
[ WARN] [1598599335.038055569]: MessageFilter [target=/rb2p_0/odom ]: Dropped 100.00% of messages so far. Please turn the [ros.amcl.message_notifier] rosconsole logger to DEBUG for more information.
[ WARN] [1598599350.036667725]: No laser scan received (and thus no pose updates have been published) for 1598599350.036541 seconds. Verify that data is being published on the /rb2p_0/scan topic.
[ WARN] [1598599365.036671067]: No laser scan received (and thus no pose updates have been published) for 1598599365.036463 seconds. Verify that data is being published on the /rb2p_0/scan topic.
[ WARN] [1598599380.036295845]: No laser scan received (and thus no pose updates have been published) for 1598599380.036107 seconds. Verify that data is being published on the /rb2p_0/scan topic.
[ WARN] [1598599395.036569373]: No laser scan received (and thus no pose updates have been published) for 1598599395.036404 seconds. Verify that data is being published on the /rb2p_0/scan topic.
[ WARN] [1598599395.047235308]: MessageFilter [target=/rb2p_0/odom ]: Dropped 100.00% of messages so far. Please turn the [ros.amcl.message_notifier] rosconsole logger to DEBUG for more information.
[ WARN] [1598599410.036871496]: No laser scan received (and thus no pose updates have been published) for 1598599410.036685 seconds. Verify that data is being published on the /rb2p_0/scan topic.
[ WARN] [1598599425.036432778]: No laser scan received (and thus no pose updates have been published) for 1598599425.036221 seconds. Verify that data is being published on the /rb2p_0/scan topic.
[ WARN] [1598599440.036580268]: No laser scan received (and thus no pose updates have been published) for 1598599440.036413 seconds. Verify that data is being published on the /rb2p_0/scan topic.
[ WARN] [1598599455.036308531]: No laser scan received (and thus no pose updates have been published) for 1598599455.036096 seconds. Verify that data is being published on the /rb2p_0/scan topic.
[ WARN] [1598599455.056863223]: MessageFilter [target=/rb2p_0/odom ]: Dropped 100.00% of messages so far. Please turn the [ros.amcl.message_notifier] rosconsole logger to DEBUG for more information.
[ WARN] [1598599470.036987237]: No laser scan received (and thus no pose updates have been published) for 1598599470.036796 seconds. Verify that data is being published on the /rb2p_0/scan topic.
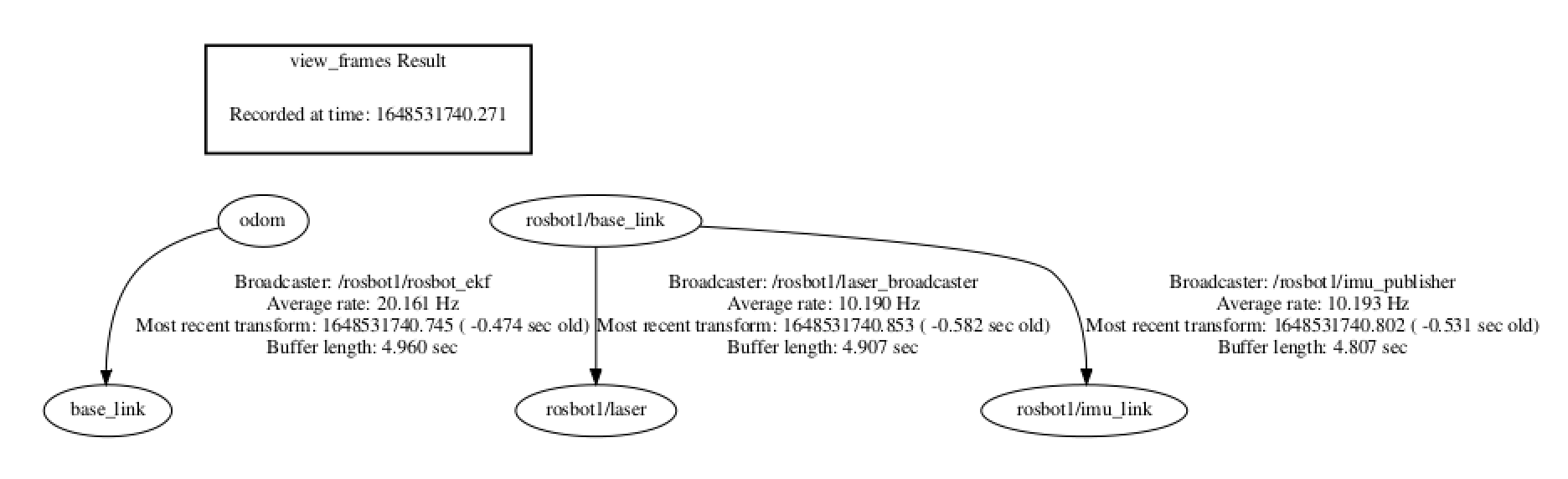
I did rostopic echo /rb2p_0/scan, there was data return, also checked the node of /rb2p_0/rosbot_ekf' and topic /rb2p_0/odom, I found topic /rb2p_0/odomwas published ,but with no subscriber, there was no link from/map to '/rb2p_0/odom in the tf_tree. Here is the node info and topic info,
sw@ubuntu:~$ rosnode info /rb2p_0/rosbot_ekf
--------------------------------------------------------------------------------
Node [/rb2p_0/rosbot_ekf]
Publications:
* /diagnostics [diagnostic_msgs/DiagnosticArray]
* /rb2p_0/odom [nav_msgs/Odometry]
* /rosout [rosgraph_msgs/Log]
* /tf [tf2_msgs/TFMessage]
Subscriptions:
* /rb2p_0/cmd_vel [geometry_msgs/Twist]
* /rb2p_0/imu [sensor_msgs/Imu]
* /rb2p_0/odom/wheel [nav_msgs/Odometry]
* /rb2p_0/set_pose [unknown type]
* /tf [tf2_msgs/TFMessage]
* /tf_static [tf2_msgs/TFMessage]
Services:
* /rb2p_0/rosbot_ekf/enable
* /rb2p_0/rosbot_ekf/get_loggers
* /rb2p_0/rosbot_ekf/set_logger_level
* /rb2p_0/rosbot_ekf/toggle
* /rb2p_0/set_pose
contacting node http://192.168.3.154:46883/ ...
Pid: 8542
Connections:
* topic: /rosout
* to: /rosout
* direction: outbound
* transport: TCPROS
* topic: /tf
* to: /rb2p_0/rosbot_ekf
* direction: outbound
* transport: INTRAPROCESS
* topic: /tf
* to: /rb2p_0/move_base
* direction: outbound
* transport: TCPROS
* topic: /tf
* to: /rb2p_0/amcl
* direction: outbound
* transport: TCPROS
* topic: /tf
* to: /rb2p_0/ROSbot_laser (http://192.168.3.154:45167/)
* direction: inbound
* transport: TCPROS
* topic: /tf
* to: /rb2p_0/robot_state_publisher (http://192.168.3.154:41401/)
* direction: inbound
* transport: TCPROS
* topic: /tf
* to: /rb2p_0/imu_publisher (http://192.168.3.154:34661/)
* direction: inbound
* transport: TCPROS
* topic: /tf
* to: /rb2p_0/amcl (http://192.168.3.154:41269/)
* direction: inbound
* transport: TCPROS
* topic: /tf
* to: /rb2p_0/rosbot_ekf (http://192.168.3.154:46883/)
* direction: inbound
* transport: INTRAPROCESS
* topic: /tf_static
* to: /rb2p_0/robot_state_publisher (http://192.168.3.154:41401/)
* direction: inbound
* transport: TCPROS
* topic: /rb2p_0/odom/wheel
* to: /rb2p_0/msgs_conversion (http://192.168.3.154:35235/)
* direction: inbound
* transport: TCPROS
* topic: /rb2p_0/imu
* to: /rb2p_0/msgs_conversion (http://192.168.3.154:35235/)
* direction: inbound
* transport: TCPROS
* topic: /rb2p_0/cmd_vel
* to: /rb2p_0/move_base (http://192.168.3.154:35515/)
* direction: inbound
* transport: TCPROS
the topic information of /rb2p_0/odom is:
sw@ubuntu:~$ rostopic info /rb2p_0/odom
Type: nav_msgs/Odometry
Publishers:
* /rb2p_0/rosbot_ekf (http://192.168.3.154:37959/)
Subscribers: None
And the tf_tree is like:
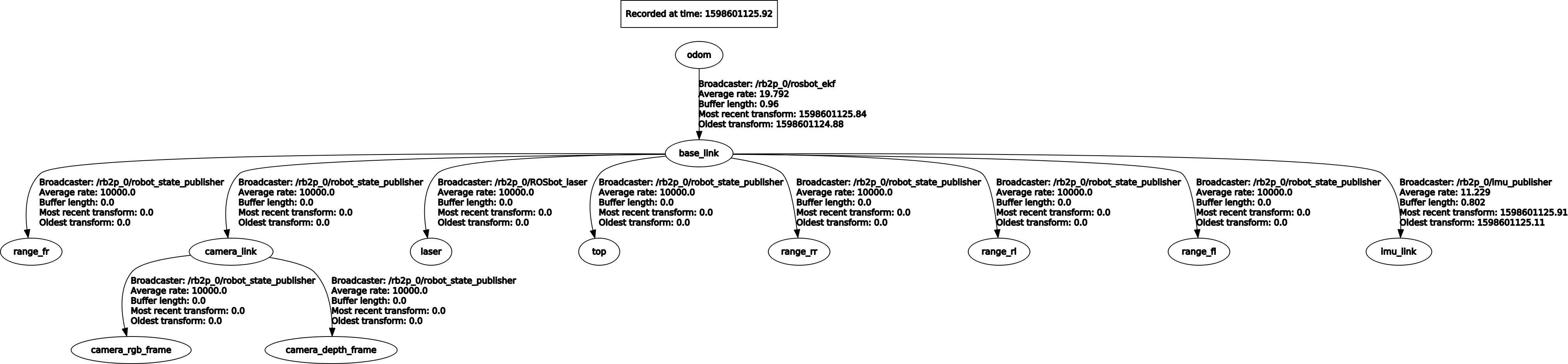
Any help is appreciated so much!