when I navigation turtlebot using a map and amcl, the local shows warn, and the status is no map received, I can us the 2D Pose Estimate to pose the turtlebot, but I cannot use the 2D nav goal to move the turtlebot, who can solve the problem for me? Thanks a lot
Hello qingyue_zhang,
You will need to provide more details.
Which exact device are you using?
Are you working with real device or simulated in Gazebo?
Which launch file are you using?
Did you follow any tutorial? If yes, at which step did you encounter problem?
Regards,
Łukasz
Hi Lukasz,
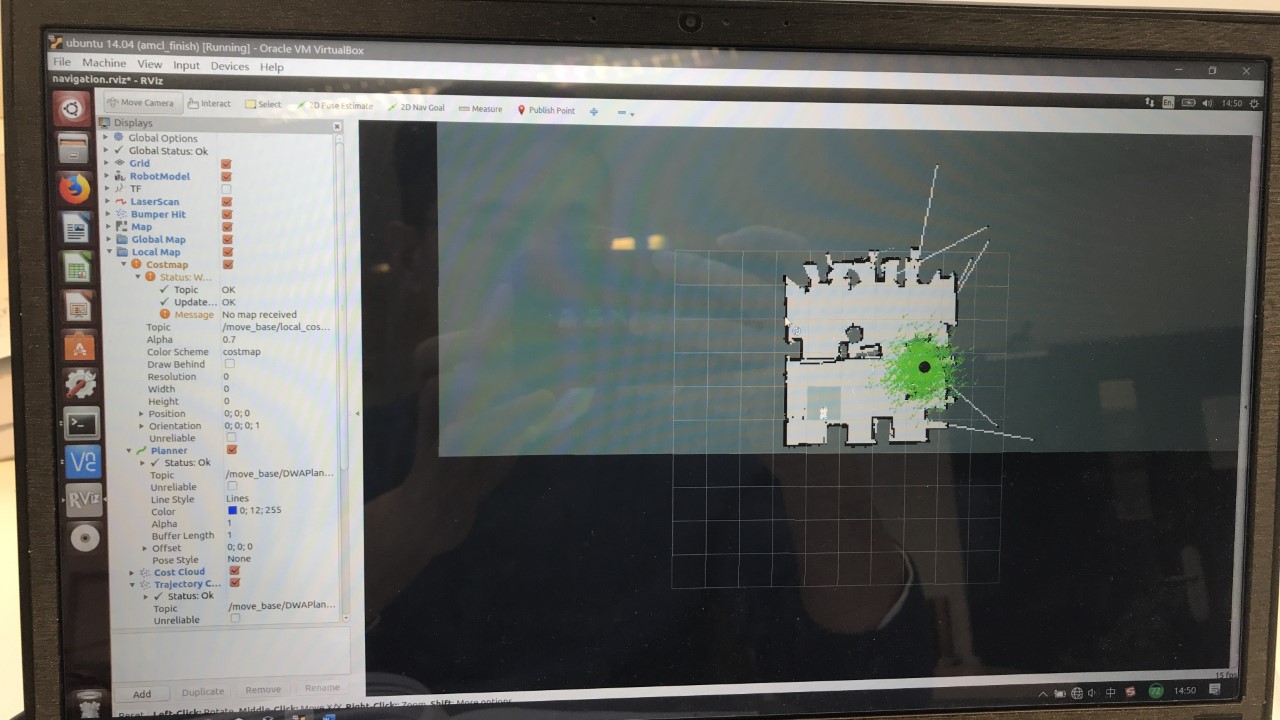
Thank you for your reply, I am running SLAM on a real turtlebot2 with hokuyo urg-40 laser scanner, I am using the ros by example to run the SLAM, I meet the problem at the last step that is navigation based on a map, when I run roslaunch turtlebot_rviz_launchers view_navigation.launch --screen it will like the picture. Which launch file do you need? gmapping?
Have you got my reply, my friend? I google it, said that the gmapping file has problems, so I amend it but doesn’t work
Hello qingyue_zhang,
This forum is dedicated for Husarion products. We are not developing with Turtlebots, thus we can not offer adequate support for Turtlebots with “ROS by exmaple”.
Anyway, based on your problem description, I would check if TF frames are generated properly for all elements and if topic names are consistent across all nodes, rqt_graph may be useful for the second check.
Regards,
Łukasz
Thank you so much Lukasz, do you know how can I check the tf frame? using tf_echo? I am not familiar with this part
Regard,
Qingyue
rqt_tf_tree is better suited for such inspection.
Regards,
Łukasz
Hi Lukasz, I have solve the problem, when I localization by a map, it will show Costmap2DROS transform timeout. Current time: … global_pose stamp: …, tolerance: 0.0001
if I connect the turtlebot with Internet cable, it will provide turtlebot and my workstation (connect turtlebot by wifi) a time, it will worked profect. I still donot konw how to solve this issue without Internet. Anyway, thank you so much.
Regards,
Qingyue