When running docker compose up camera on ROSbot 2R, CPU usage on the Raspberry Pi 4 quickly reaches around 90% per core.
As a result, it becomes practically impossible to run SLAM on-board using an RGB-D camera.
Would it be reasonable to switch the onboard computer from Raspberry Pi 4 to Jetson Nano?
If so, is there any official guidance or recommended configuration for using Jetson Nano with ROSbot 2R?
Hi @yongyun_song,
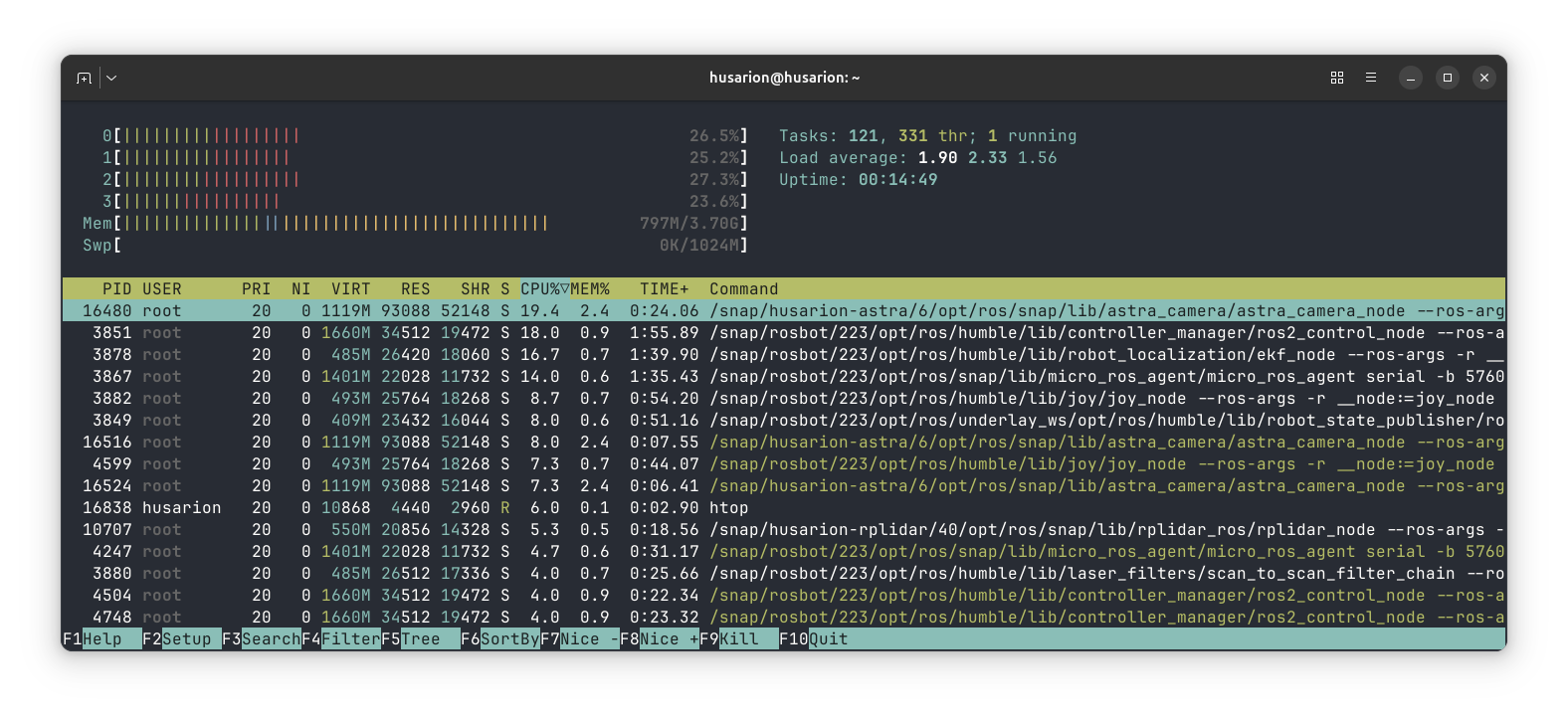
The ROSbot 2R snap-based configuration (rosbot, husarion-astra, husarion-rplidar)* hovers around 30% CPU utilization. Reviewing the history, I see that the camera service is called astra. Therefore, I suspect that in your case, we’re dealing with a different driver or a different camera.
*For Dockers (which were used by default in the 2R), the usage may be higher, but it still shouldn’t exceed 45%.
Recomendations
Changing the computer isn’t possible with the ROSbot 2R. The ROSbot 2R is a custom-built robot. The hardware is closely linked to the rpi4 computer via GPIO and communication software. The ROSbot XL is a robot that provides the user with available space and options for custom configuration.
In the case of the Rb 2R, you can consider:
- optimizing the camera code or reducing the resolution
- adding a shelf to a second computer and connecting it with an Ethernet cable
- swapping RPI4 → RPI5 - both in size and GPIO should match