Hi all,
For our robot arm project, we need to power three 24V stepper motor using the CORE2-ROS.
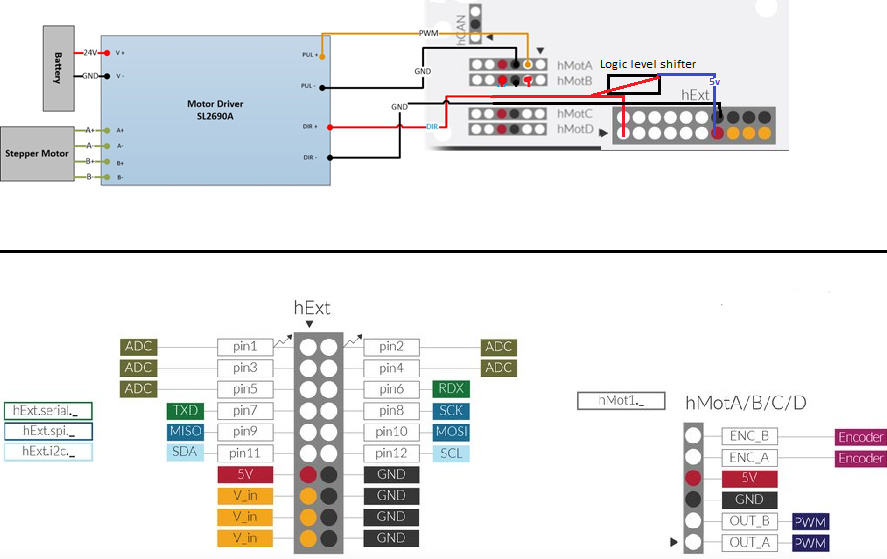
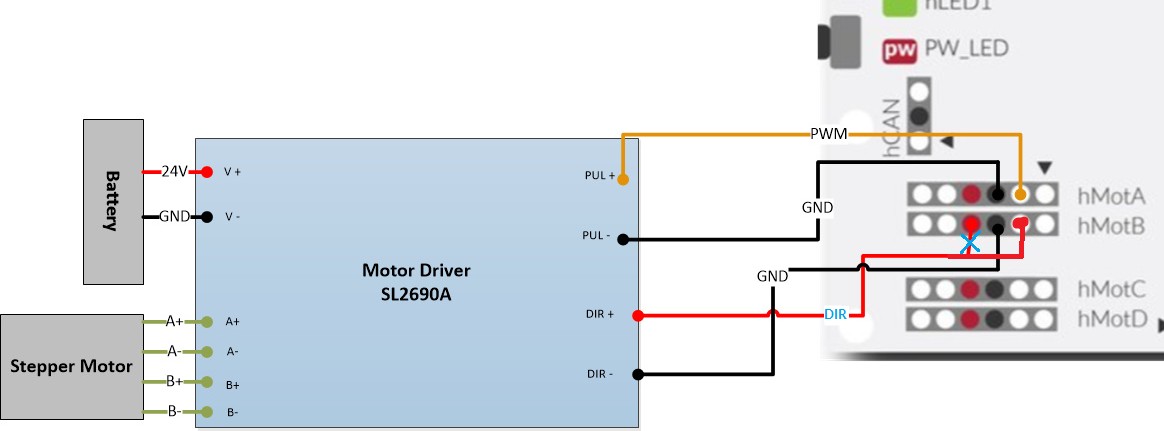
The drivers used are 2x SL2690A and one TB6600. Currently, we control 2 motors by using the following schematic for one motor driver (so HmotC and D are also in use) (thanks to the help of:https://community-mirror.husarion.com/t/stepper-motor-wiring/683).
At the moment we are struggling with two types of issues, hopefully somebody can prove us insight into the following issues:
• With the current schematics for operating 2 motors(see schematic above) how can we code the directional signal so that we can give a logic high (5v +) signal or give a low signal (GND) so that it operates in opposite direction?
• Within the manual → Electrical specification → there is stated that there are “ 3.3v/5v tolerant GPIOs” would it be a possibility to use of the Hext pins (1-5) with GPIO function in order to give the stepper drives an DIR signal, so that each stepper motor only uses 1 Hmot (a,b,c,d) port, so that the total of 3 stepper motors can be powered (using 3 different Hmot ports)?
Thanks for your time!
Kind regards,
ARVI