We have started using the AUX output of the Panther since we aim to use a step-down converter to get a 24V bus on the robot. I have connected the buck-converter to the AUX output through a soft-starter circuit, as we initially encountered problems with current inrush triggering the OCP of the AUX output. Now, when higher currents are drawn for the AUX output (Above 4A but definitely below 10A), the OCP still seems to be triggered. We are not encountering any ROS issues, as the ROS service for the AUX output stays enabled. What is the maximum power output of this port? What can be causing it to crash to about 40mV on the output after a little power is drawn?
Hi,
could you plase share more information about used DC/DC converter and soft-start used?
The current limit (designed and tested for each Panther) is about 11A. Unless something is not damaged, you should not have issues with the current limit.
In general, it is tricky to balance between the safety (do not overload/short circuit the internal battery) and handling the high inrush currents. I suppose that the soft-start you have used may not be enough and still the current exceed 11A for some time, even a fraction of a milisecond.
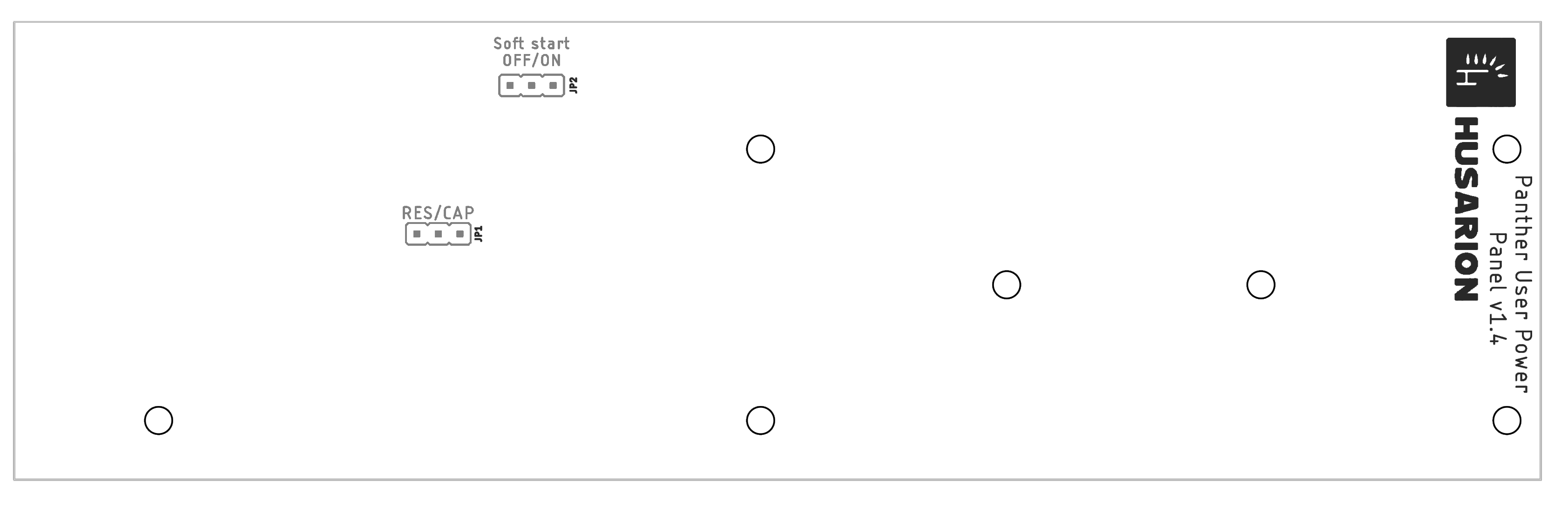
DC/DC converters, in general, are the capacitive load, at least on the startup. For this kind of load we have prepared an option normally not used by user. The User Power Panel module, which contains 10x XT60 connector on the User side, may be accessed on the other side, under the service deck. There are two jumpers on the PCB:
- One is marked “RES/CAP” - in “CAP” position an internal soft start for DC/DC converters is active, to be used with converters that have an internal delay function.
- The second jumper is “Soft start” but we cannot recommend changing this jumper position before confirming the character of the load you would like to use (DC/DC converter or not, and what type/model/characteristics).
Both jumpers are behind some cables and maybe some of them must be disconnected to reach the jumpers.
Please read this chapter in our docs before accessing the Front Service Space:
Thank you for the expansive response and bringing up the options on the User Power Panel Board. We are using a Mean Well RSD-300E-24 which has a rated inrush current of 45A at 36V. The soft starting circuitry is a self-developed unit with a 10Ohm resistor that gets bypassed by a relay after 2 seconds of start-up time. Without the soft-starter, the DC/DC converter doesn’t get powered on at all. With the soft-starter it starts up and works, untill we get a transient event by means of turning on a DC motor or turning a stepper motor. We know that these transients don’t exceed 10A on the 24V side of the DC/DC converter, but they do seem to trigger the OCP of the Panther. Which output adjustment would be most suitable in this case?
Hi,
Thank you for the detailed information too.
One thing is to be confirmed - whether the LED panels work all the time, even after OCP event? If they do, we can focus on the AUX output overcurrent protection. Otherwise, it could be a global overcurrent protection on the Power Board and the advice below would not apply to your case.
I assume it is a local OCP on AUX output. Maybe the transient current value is not the same all the time, maybe this is a measurement error, or for other unknown reason the OCP triggers “too early”.
I see two solutions: reduce the current consumption or increase the current limit on our AUX output. The first is obvious, the second one requires disassembling the front deck of Panther Service Space. There is a small solder-jumper on the PCB that is not designed for User but we configure the current limit to 20A instead of 10A if we are sure that the complete setup is “safe”.
In your case, the robot configuration meets the following minimum conditions for changing the current limit to 20A, if:
- the load type is identified and approved (MeanWell RSD-300E-24 DC/DC converter),
- the only device connected to the AUX output is the mentioned MeanWell DC/DC converter,
- the jumpers configuration is confirmed - not every jumpers conbination is safe,
- the User confirms that is able to do the modification,
- the User understands that the modification will be made on the User risk.
In your case I believe all point are met and you can try to:
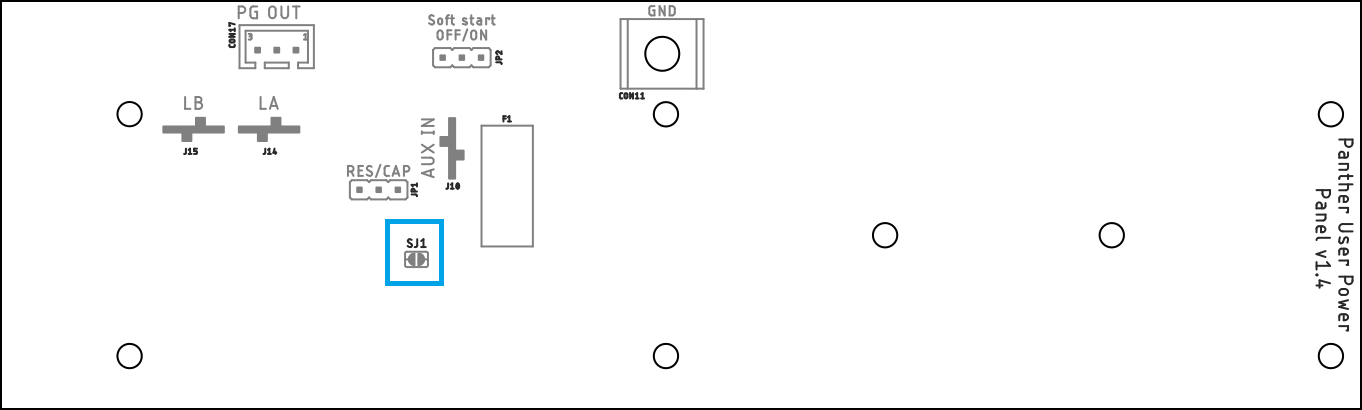
- Unsolder SJ1 solder jumper (it changes the limit to 20A). It is initially soldered (shorted), you need to remove the solder and leave it open. Unfortunately, the access to this jumper is not easy - some of the cables need to be disconnected. Please see attached picture to see SJ1, marked with blue rectangle.
- Make sure the JP1 (RES/CAP jumper) in “RES” position,
- (optional) Change the JP2 (Soft-start jumper) to “ON” position - it activates the internal soft-start so you probably may not need your soft-start. If you keep you external soft-start it might be better to keep “OFF” position. The internal soft-start works in the similar way like yours.
To other Panther users: This advice applies to a specific robot unit and does not apply to every Panther. Do not change jumpers position without confirming with Husarion. If you do, it will be on your own risk.
The LED panels kept working, so it’s just localized to the AUX output OCP. I have since done the adjustment on the new Panther we have received and it works perfectly! Thank you for the guide and the support.
1 Like