Hi there,
I managed to flash an SD card (via Rufus) with the husarion-ugv-rpi-ubuntu-24.04-v2.2.1b.img to replace the existing one in Panther. As indicated in the user guide, I had to remove the single battery which was then re installed correctly after the rear service compartment was closed after the SD card swap on the Raspberry pi.
I followed the steps of the documentation to install the card and then to set up the software side on the built-in computer: I did the first_boot_install.sh which implemented the docker for the different parts including the webui snap. To get this one to work, I had to restore the RTUX11 router as indicated in the documentation as well and had to reset manually the user computer static IP.
The install and implementation seemed successful and I managed to do a couple of shutdown and boot up without errors while setting:
- chrony on the user in computer
- go over the set up of the shutdown_host.yaml process to synchronize the soft shutdown
I did several tests and this worked well until at some point the boot was hanging at a specific step on the built-in computer:
- the front bumper led lights remain solid white
- the rear bumper led lights remain solid red (small light intensity variation maybe)
- the built in computer can still be access via ssh and is responsive, however I suspected something was hanging in the docker containers start sequence.
- the light sequence was reflective of the ESTOP activation, but I tried to deactivate after de latching the physical Estop on the robot via the remote control and could not. The remote control seems fine (battery level, flash responsive). The Estop LED animation was also different on the original version delivered on the robot (flashing red lights)
I tried two different method to restart the container while not doing a power cycle:
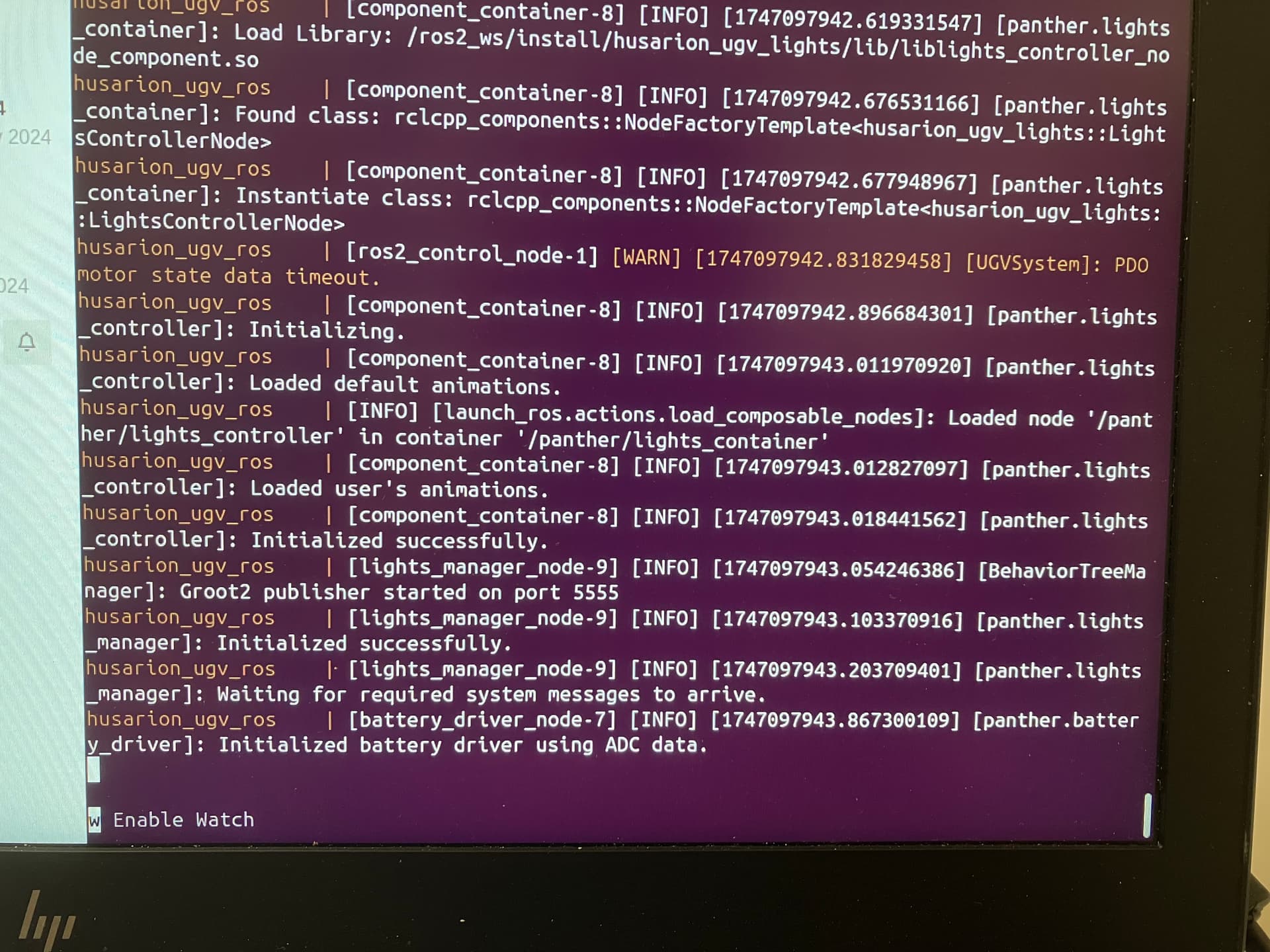
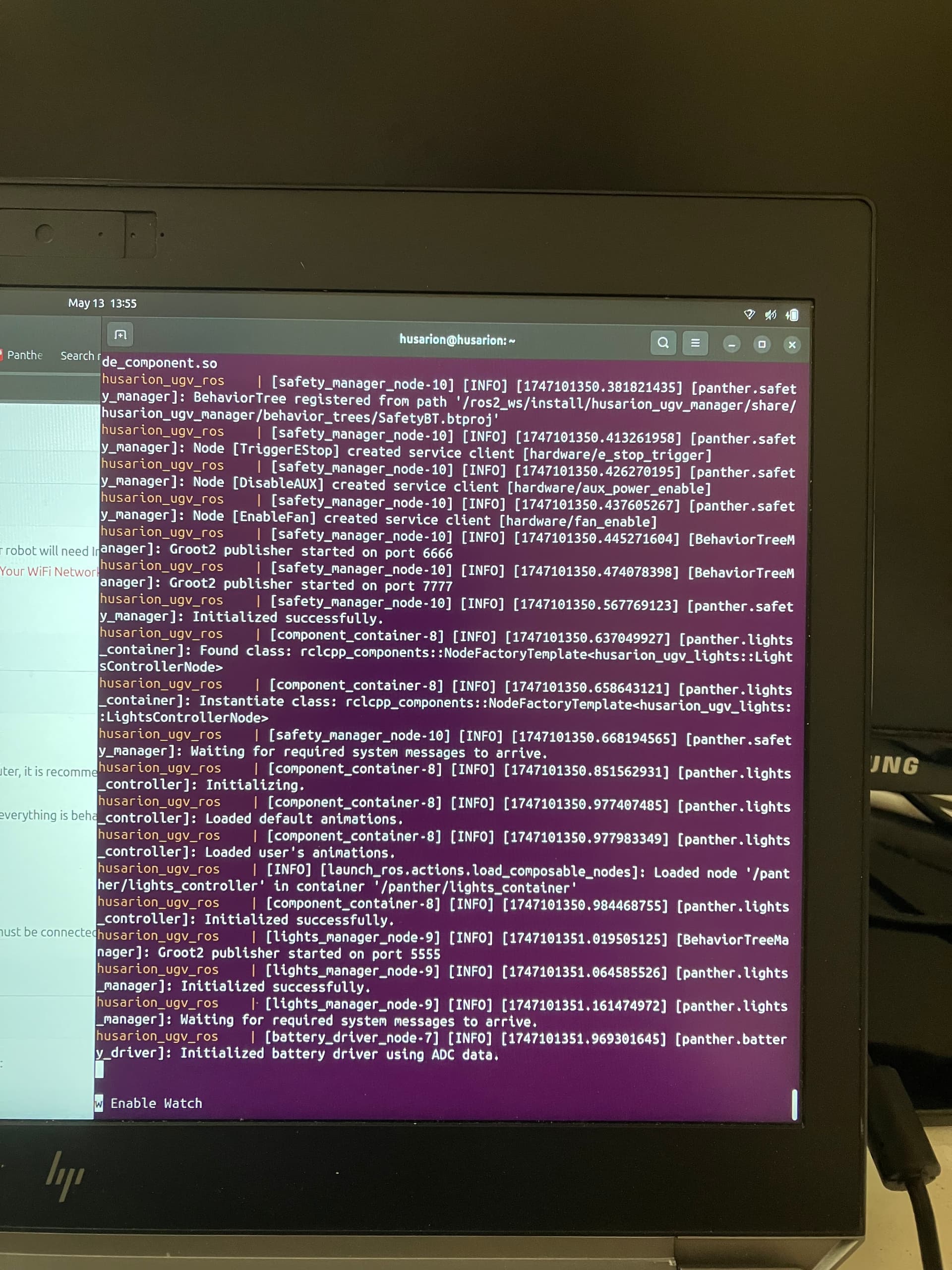
docker compose up -d --force-recreateon the built-in computer as the one mentioned in step 15 of setting up the soft shutdown of any user computer. This showed the same behavior (hanging and solid white at the front and red at the rear on the bumper lights).docker compose down,docker compose upwhich shows the progress of the container process and indicates where the process is held by something as shown below:[panther.lights_manager]: Waiting for required system message to arrive.[panther.battery_driver]: Initialized battery driver using ADC data.
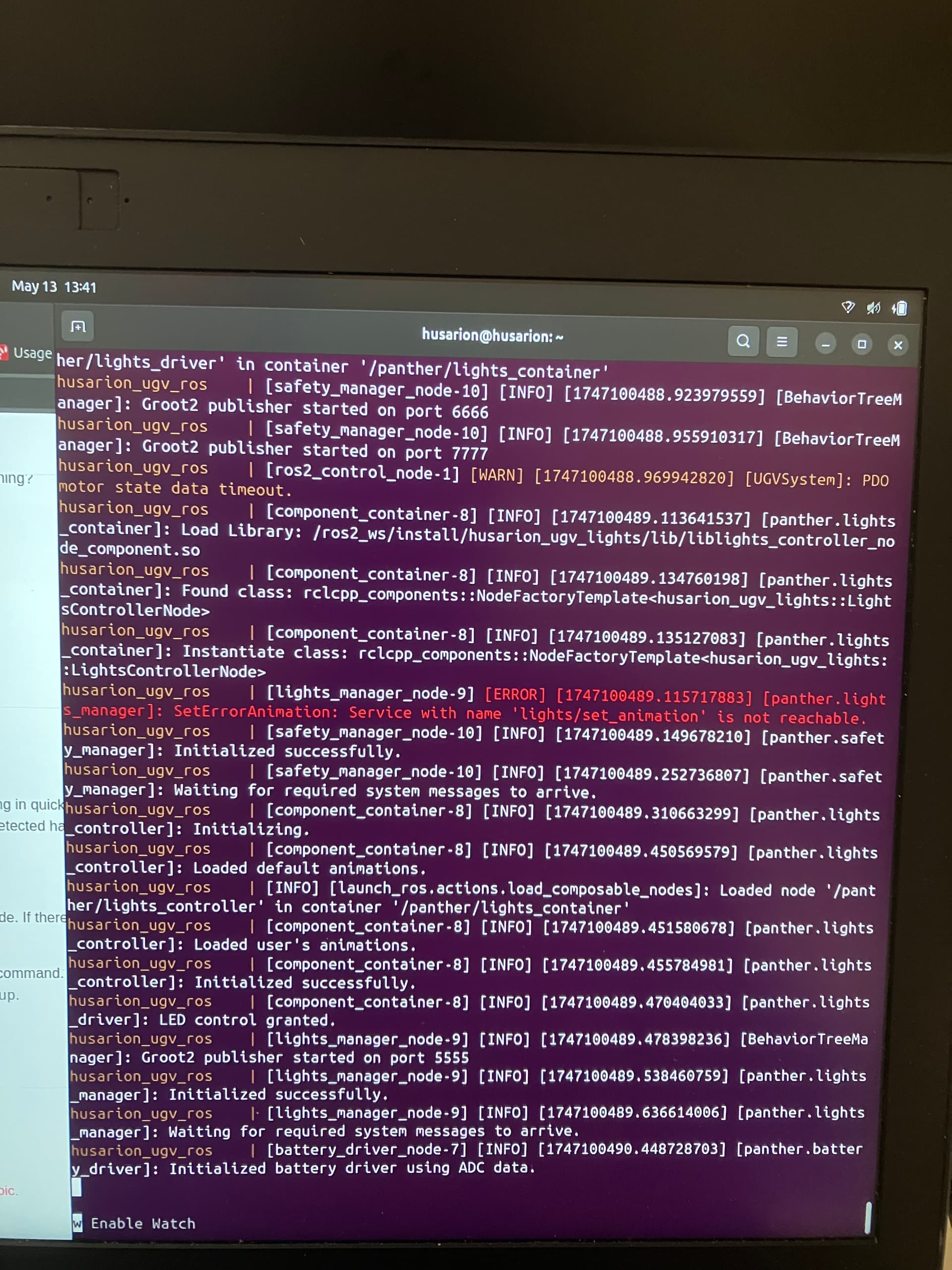
- on some instances, I have the additional message error message a bit before the previous message but not always
[ERROR][timestamp][panther.lights_manager]: SetErrorAnimation: Service with name 'lights/set_animation' is not reachable.- when waiting a long time, I have sometime
[battery_driver_node-7][WARN] [timestamp][panther.battery_driver]: An exception occured while reading battery data: Failed to read from file: /sys/bus/iio/devices/iio:devices1/in_voltage_raw - When this happens I have the same with
in_voltage0_raw
Again with either methods the container start up seems held (hanging and solid white at the front and red at the rear on the bumper lights) with no info displayed in webgui.
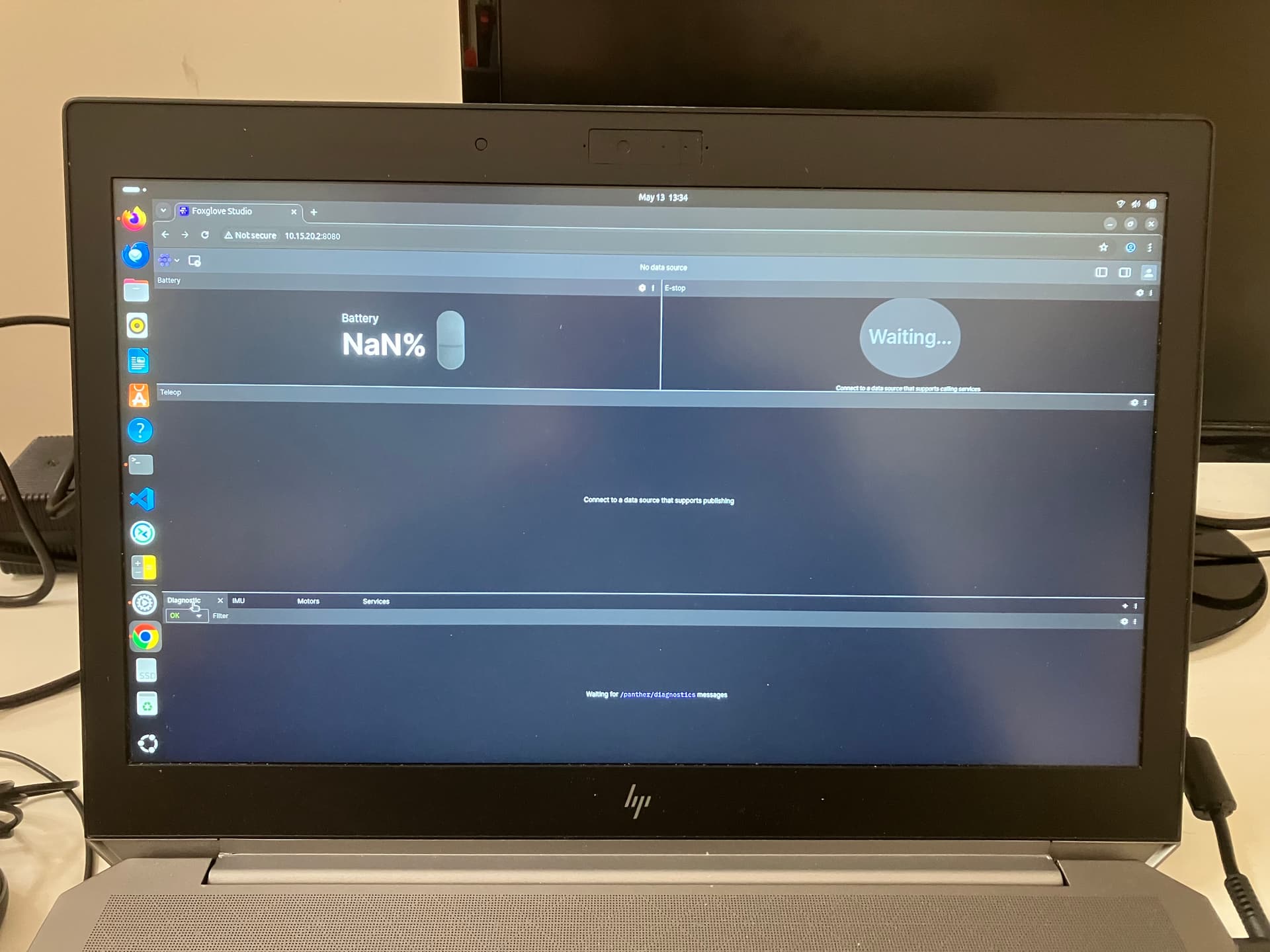
The webgui on 10.15.20.2/8080 shows the background but not data at all (no status of battery, no estop status,…) while this works on the few sequences I did after the first_boot installation shell.
Could you confirm the following points:
- possible nature of the issue
- Is the robot just in Estop and not responsive to remote control, how could I release the estop without the remote control (ros2 command)?
- latest image that should be used for the Panther install (I used the husarion-ugv-rpi-ubuntu-24.04-v2.2.1b.img as mentioned in the documentation, but I have also the husarion-ugv-rpi-ubuntu-24.04-v2.2.0.img and husarion-ugv-rpi-ubuntu-24.04-v2.2.1.img)
Robot version 1.23, ROS driver version 2.2.0, OS 24.04.2 LTS
Here are some screenshots:
I noted one difference between the compose.yaml file for starting the container and what is written on the documentation:
The command for husarion_ugv_ros is:
ros2 launch husarion_ugv_bringup bringup.launch.py
common_dir_path:=/config
The command as shown on the documentation is:
ros2 launch husarion_ugv_bringup bringup.launch.py namespace:=panther shutdown_hosts_config_path:=/shutdown_hosts.yaml #if putting the soft shutdown synchronisation with the user computer
There is a namespace in the documentation and not in the image, not sure if this can impact the container proper start up sequence to get it to work as well.
Thank you for your help,
Nicolas