Hi,
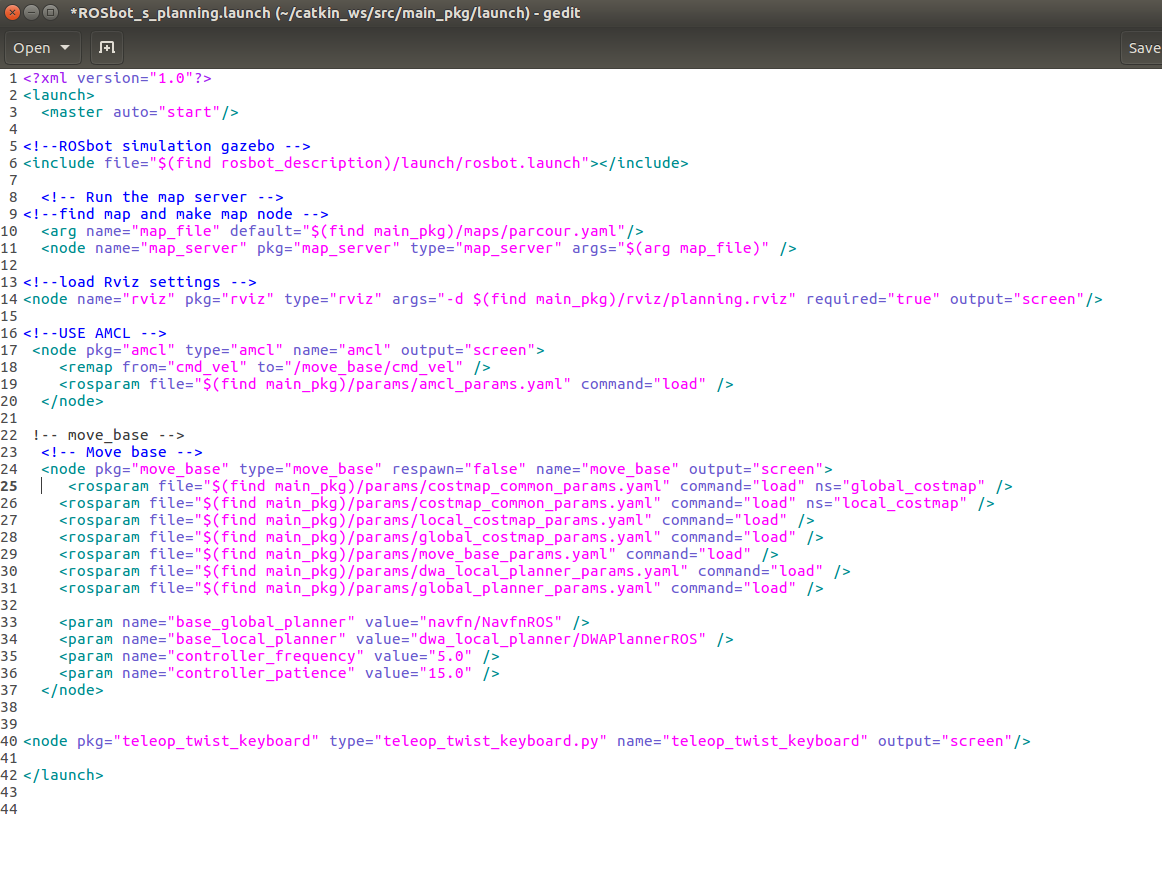
For a project i want to use the DWA planner for local costmap and NavfnROS for global.
Are there any tests with configurated parameters for the ROSbot 2.0 available for these planners?
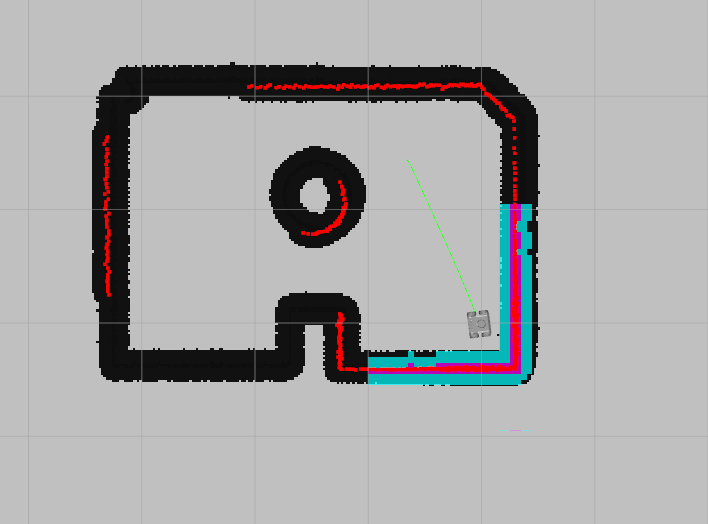
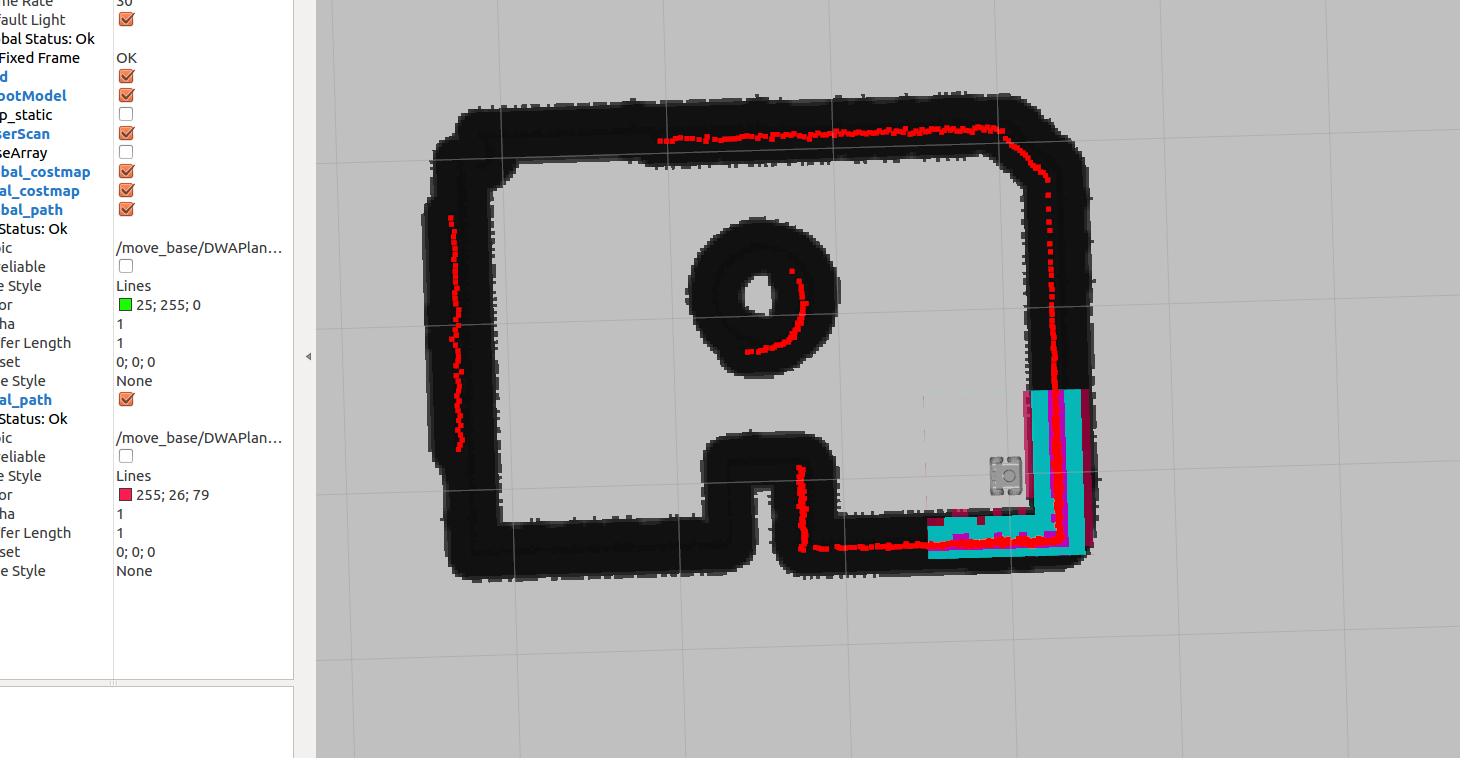
I got problems with avoiding obstacles with these planners.
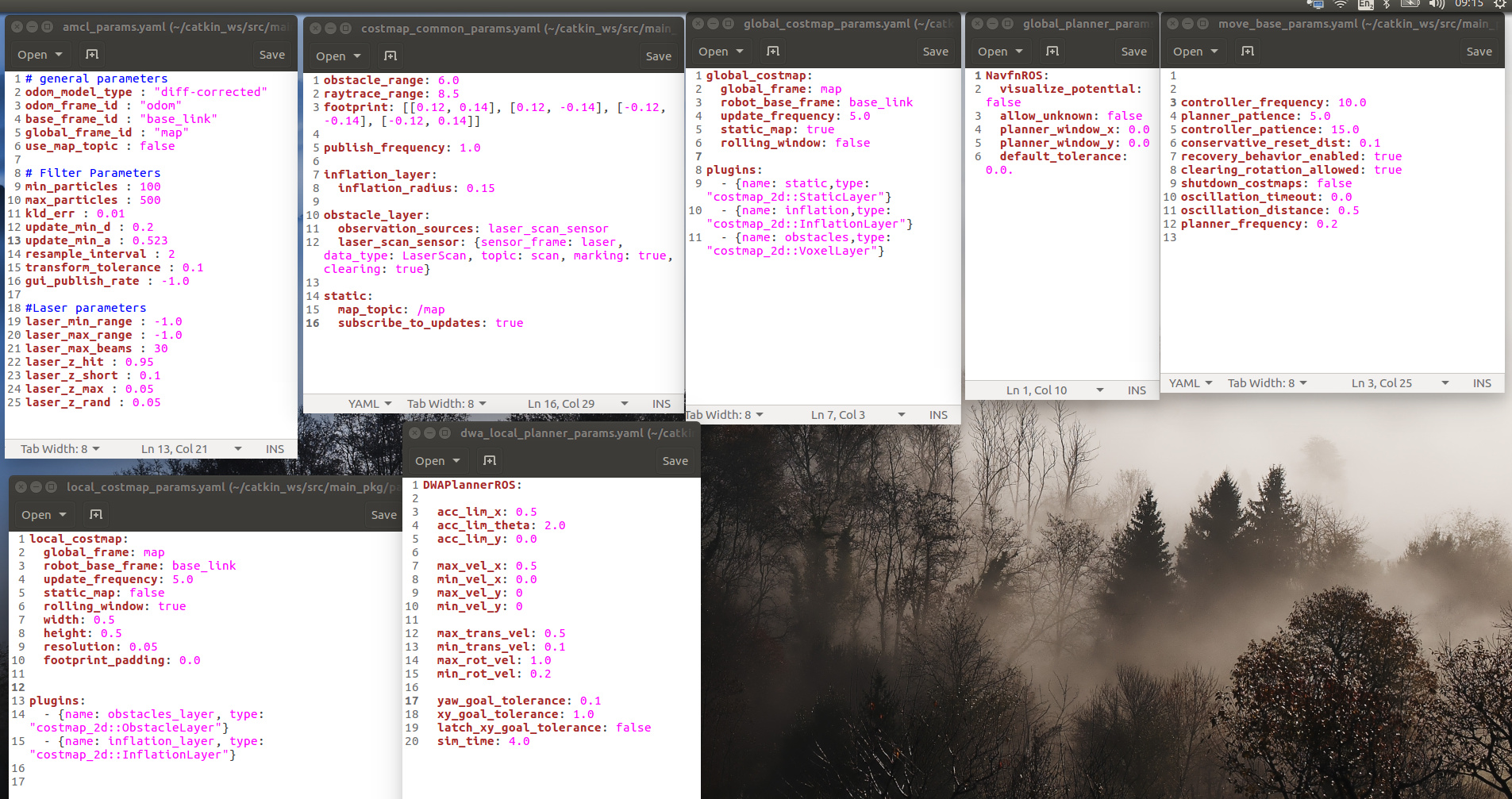
Settings now:
NavfnROS:
visualize_potential: false
allow_unknown: false
planner_window_x: 0.0
planner_window_y: 0.0
default_tolerance: 0.0.
DWAPlannerROS:
max_vel_x: 0.2
min_vel_x: 0.0
max_vel_y: 0.0
min_vel_y: 0.0
max_trans_vel: 0.5
min_trans_vel: 0.5
trans_stopped_vel: 0.1
acc_lim_x: 1.0
acc_lim_theta: 2.0
acc_lim_y: 0.0
max_rot_vel: 1.5
min_rot_vel: 0.1
rot_stopped_vel: 0.0
yaw_goal_tolerance: 0.3
xy_goal_tolerance: 0.15
sim_time: 1.7
vx_samples: 3
vy_samples: 10
vtheta_samples: 20
path_distance_bias: 64.0
goal_distance_bias: 24.0
occdist_scale: 0.01
forward_point_distance: 0.2
stop_time_buffer: 0.2
scaling_speed: 0.25
max_scaling_factor: 0.2
oscillation_reset_dist: 0.05
publish_traj_pc : true
publish_cost_grid_pc: true
global_frame_id: odom
holonomic_robot: false
global_costmap:
global_frame: map
robot_base_frame: base_link
update_frequency: 5.0
static_map: true
rolling_window: false
plugins:
- {name: static,type: “costmap_2d::StaticLayer”}
- {name: inflation,type: “costmap_2d::InflationLayer”}
- {name: obstacles,type: “costmap_2d::VoxelLayer”}
local_costmap:
global_frame: map
robot_base_frame: base_link
update_frequency: 5.0
static_map: false
rolling_window: true
width: 2
height: 2
resolution: 0.05
footprint_padding: 0.0
plugins:
- {name: obstacles_layer, type: “costmap_2d::ObstacleLayer”}
- {name: inflation_layer, type: “costmap_2d::InflationLayer”}
Move parameters:
controller_frequency: 10.0
planner_patience: 5.0
controller_patience: 15.0
conservative_reset_dist: 3.0
recovery_behavior_enabled: true
clearing_rotation_allowed: true
shutdown_costmaps: false
oscillation_timeout: 0.0
oscillation_distance: 0.5
planner_frequency: 0.2
Rosbot can’t handle this situation: