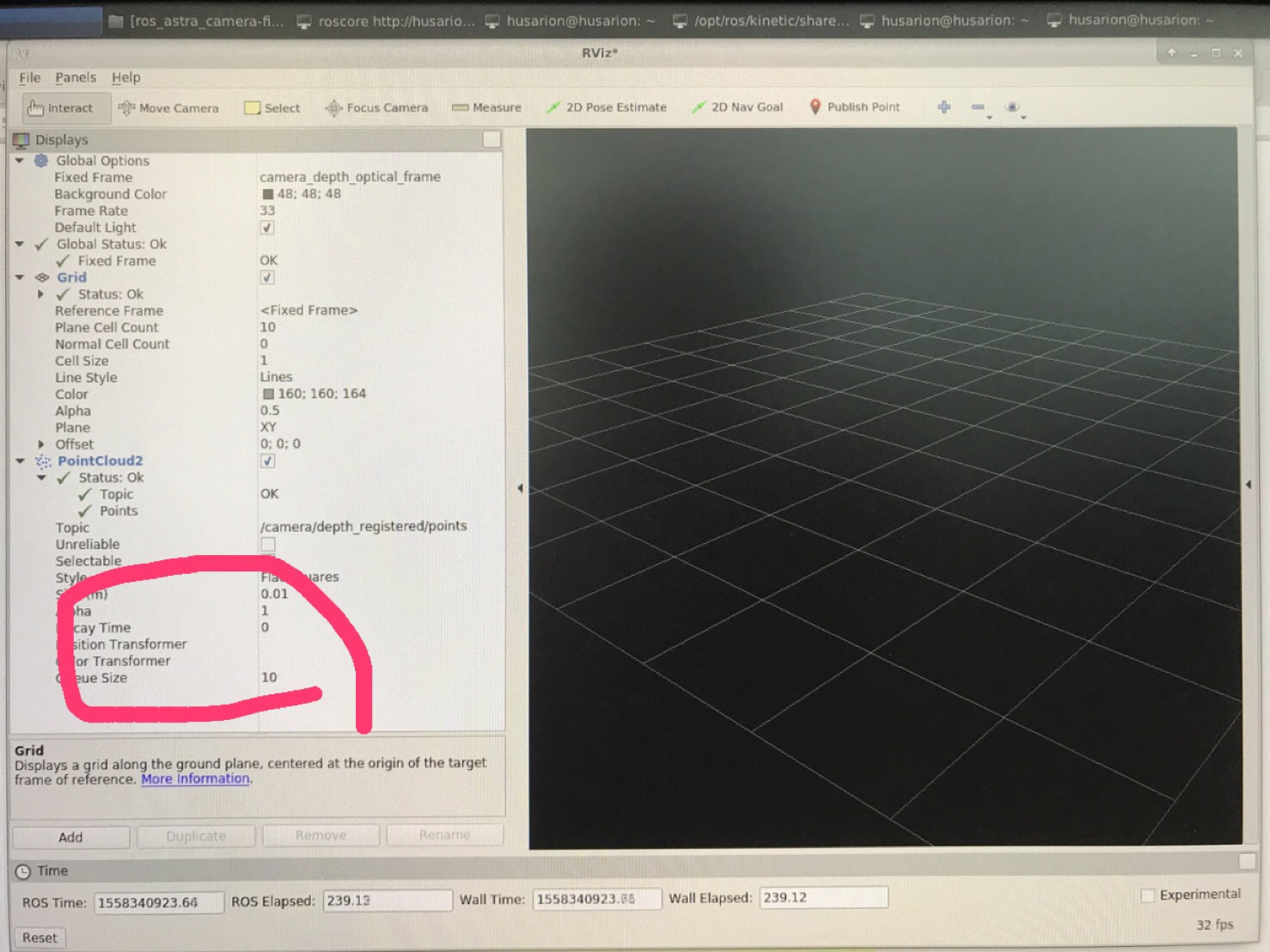
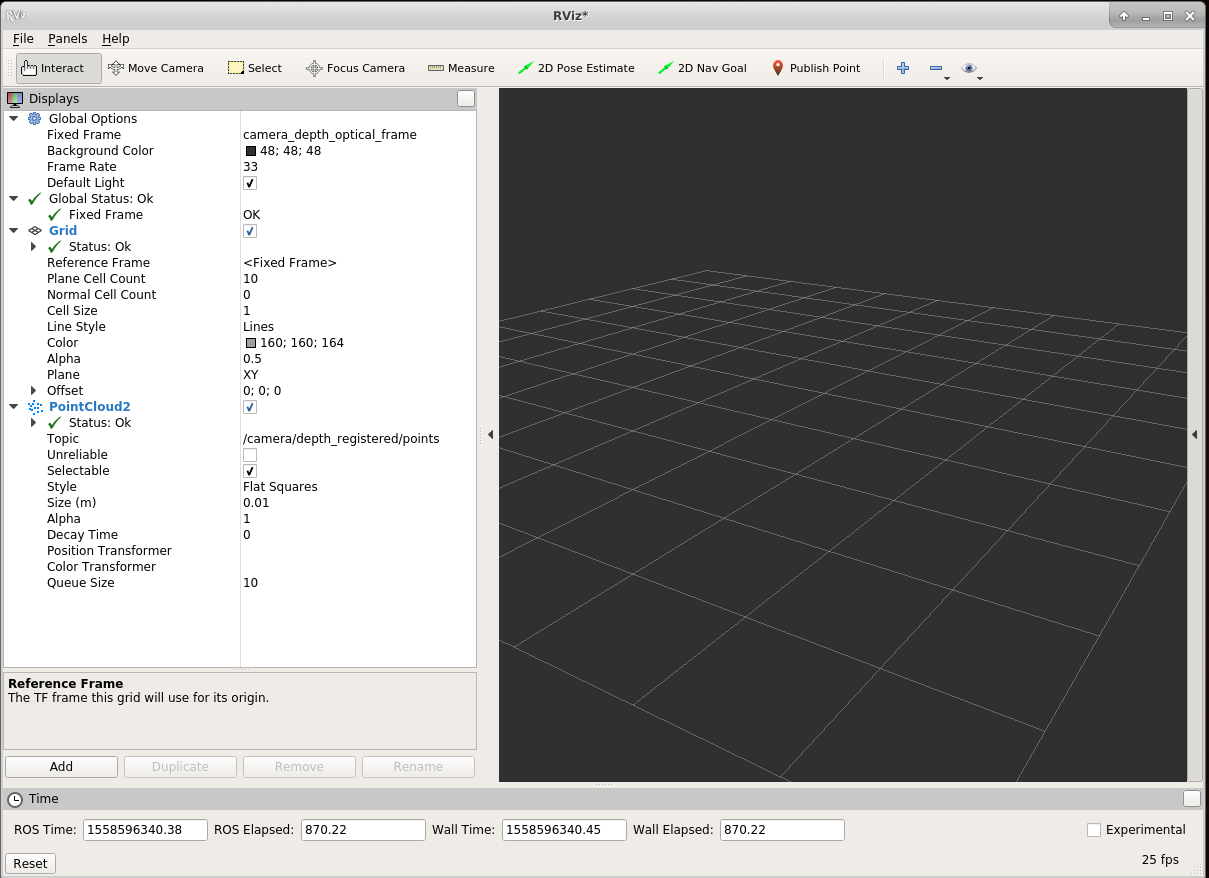
I was trying to follow the tutorial but cannot getting point cloud in rviz. Moreover, Position Transformer and Color Transformer is empty.
Please help.
I was trying to follow the tutorial but cannot getting point cloud in rviz. Moreover, Position Transformer and Color Transformer is empty.
Please help.
Hello aiubian,
To help you, I will need some more info.
Regards,
Łukasz
Hi lukasz,
I am using Orbbec Astra Pro 3D Camera in ROSbot 2.0. I followed from this ROSbot Camera not showing up in UI - #17 by lukasz.mitka .
When i run this
rostopic hz /camera/depth_registered/points
I am getting
no new messages
Hello aiubian,
Which launch file are you using?
What output do you get after starting launch file?
Regards,
Łukasz
Hi lukasz,
I have used the following command.
roslaunch astra_launch astra.launch
I am getting following output.
… logging to /home/husarion/.ros/log/d28cd72c-7d16-11e9-98f6-80c5f2fe52a3/roslaunch-husarion-9488.log
Checking log directory for disk usage. This may take awhile.
Press Ctrl-C to interrupt
Done checking log file disk usage. Usage is <1GB.started roslaunch server http://husarion:38041/
SUMMARY
PARAMETERS
- /camera/camera_nodelet_manager/num_worker_threads: 4
- /camera/depth_rectify_depth/interpolation: 0
- /camera/driver/auto_exposure: True
- /camera/driver/auto_white_balance: True
- /camera/driver/bootorder: 0
- /camera/driver/color_depth_synchronization: False
- /camera/driver/depth_camera_info_url:
- /camera/driver/depth_frame_id: camera_depth_opti…
- /camera/driver/depth_registration: False
- /camera/driver/device_id: #1
- /camera/driver/devnums: 1
- /camera/driver/rgb_camera_info_url:
- /camera/driver/rgb_frame_id: camera_rgb_optica…
- /rosdistro: kinetic
- /rosversion: 1.12.14
NODES
/camera/
camera_nodelet_manager (nodelet/nodelet)
depth_metric (nodelet/nodelet)
depth_metric_rect (nodelet/nodelet)
depth_points (nodelet/nodelet)
depth_rectify_depth (nodelet/nodelet)
depth_registered_sw_metric_rect (nodelet/nodelet)
driver (nodelet/nodelet)
points_xyzrgb_sw_registered (nodelet/nodelet)
register_depth_rgb (nodelet/nodelet)
rgb_rectify_color (nodelet/nodelet)
/
camera_base_link (tf/static_transform_publisher)
camera_base_link1 (tf/static_transform_publisher)
camera_base_link2 (tf/static_transform_publisher)
camera_base_link3 (tf/static_transform_publisher)auto-starting new master
process[master]: started with pid [9560]
ROS_MASTER_URI=http://master:11311setting /run_id to d28cd72c-7d16-11e9-98f6-80c5f2fe52a3
process[rosout-1]: started with pid [9595]
started core service [/rosout]
process[camera/camera_nodelet_manager-2]: started with pid [9608]
process[camera/driver-3]: started with pid [9614]
process[camera/rgb_rectify_color-4]: started with pid [9618]
process[camera/depth_rectify_depth-5]: started with pid [9619]
process[camera/depth_metric_rect-6]: started with pid [9620]
process[camera/depth_metric-7]: started with pid [9623]
process[camera/depth_points-8]: started with pid [9630]
process[camera/register_depth_rgb-9]: started with pid [9645]
process[camera/points_xyzrgb_sw_registered-10]: started with pid [9650]
process[camera/depth_registered_sw_metric_rect-11]: started with pid [9660]
process[camera_base_link-12]: started with pid [9668]
process[camera_base_link1-13]: started with pid [9686]
process[camera_base_link2-14]: started with pid [9692]
process[camera_base_link3-15]: started with pid [9707]
[ INFO] [1558587260.925111417]: Initializing nodelet with 4 worker threads.
[ INFO] [1558587261.367833285]: Device “2bc5/0403@1/30” found.
Warning: USB events thread - failed to set priority. This might cause loss of data…
Hello aiubian,
Astra Pro has different configuration, there is special launch file for this model:
roslaunch astra_launch astrapro.launch
Regards,
Łukasz
Hi lukasz,
I have tried the following command
roslaunch astra_launch astrapro.launch
i am getting the following output
… logging to /home/husarion/.ros/log/e9d6a774-7d29-11e9-9908-80c5f2fe52a3/roslaunch-husarion-10983.log
Checking log directory for disk usage. This may take awhile.
Press Ctrl-C to interrupt
Done checking log file disk usage. Usage is <1GB.started roslaunch server http://husarion:41805/
SUMMARY
PARAMETERS
- /camera/camera_nodelet_manager/num_worker_threads: 4
- /camera/depth_rectify_depth/interpolation: 0
- /camera/driver/auto_exposure: True
- /camera/driver/auto_white_balance: True
- /camera/driver/bootorder: 0
- /camera/driver/color_depth_synchronization: False
- /camera/driver/depth_camera_info_url:
- /camera/driver/depth_frame_id: camera_depth_opti…
- /camera/driver/depth_registration: False
- /camera/driver/device_id: #1
- /camera/driver/devnums: 1
- /camera/driver/rgb_camera_info_url:
- /camera/driver/rgb_frame_id: camera_rgb_optica…
- /rosdistro: kinetic
- /rosversion: 1.12.14
NODES
/camera/
camera_nodelet_manager (nodelet/nodelet)
depth_metric (nodelet/nodelet)
depth_metric_rect (nodelet/nodelet)
depth_points (nodelet/nodelet)
depth_rectify_depth (nodelet/nodelet)
depth_registered_sw_metric_rect (nodelet/nodelet)
driver (nodelet/nodelet)
points_xyzrgb_sw_registered (nodelet/nodelet)
register_depth_rgb (nodelet/nodelet)
/
camera_base_link (tf/static_transform_publisher)
camera_base_link1 (tf/static_transform_publisher)
camera_base_link2 (tf/static_transform_publisher)
camera_base_link3 (tf/static_transform_publisher)auto-starting new master
process[master]: started with pid [11053]
ROS_MASTER_URI=http://master:11311setting /run_id to e9d6a774-7d29-11e9-9908-80c5f2fe52a3
process[rosout-1]: started with pid [11090]
started core service [/rosout]
process[camera/camera_nodelet_manager-2]: started with pid [11104]
process[camera/driver-3]: started with pid [11112]
process[camera/depth_rectify_depth-4]: started with pid [11113]
process[camera/depth_metric_rect-5]: started with pid [11114]
process[camera/depth_metric-6]: started with pid [11122]
process[camera/depth_points-7]: started with pid [11135]
process[camera/register_depth_rgb-8]: started with pid [11144]
process[camera/points_xyzrgb_sw_registered-9]: started with pid [11151]
process[camera/depth_registered_sw_metric_rect-10]: started with pid [11163]
process[camera_base_link-11]: started with pid [11171]
process[camera_base_link1-12]: started with pid [11176]
process[camera_base_link2-13]: started with pid [11189]
process[camera_base_link3-14]: started with pid [11201]
[ INFO] [1558595460.444084908]: Initializing nodelet with 4 worker threads.
[ INFO] [1558595460.666904055]: Device “2bc5/0403@1/11” found.
Warning: USB events thread - failed to set priority. This might cause loss of data…
[ INFO] [1558595470.006958098]: Starting depth stream.
[ INFO] [1558595470.185913078]: using default calibration URL
[ INFO] [1558595470.186302734]: camera calibration URL: file:///home/husarion/.ros/camera_info/depth_Astra_Orbbec.yaml
[ INFO] [1558595470.186860093]: Unable to open camera calibration file [/home/husarion/.ros/camera_info/depth_Astra_Orbbec.yaml]
[ WARN] [1558595470.187091670]: Camera calibration file /home/husarion/.ros/camera_info/depth_Astra_Orbbec.yaml not found.
Still not showing anythin in rviz
Hello aiubian,
Unfortunately, we could not reproduce your problem as we are not using Astra Pro.
You could check if your device is working properly by connecting it to computer with Orbbec SDK installed.
You could also ask a question on Orbbec community.
Regards,
Łukasz