A few weeks ago, purchased the ROSBot 2.0 PRO (with GPS) and currently going through the tutorials.
The tutorials have been VERY helpful in learning how to work with the robot.
This weekend progressed to the section:
https://husarion.com/tutorials/ros-tutorials/6-slam-navigation/#navigation-and-map-building
where the posted launch xml was created and launched.
When running as is, I get the following warning
[ WARN] [1603809983.070412718]: MessageFilter [target=odom ]: Dropped 100.00% of messages so far. Please turn the [ros.gmapping.message_filter] rosconsole logger to DEBUG for more information.
Moreover the tf tree is:
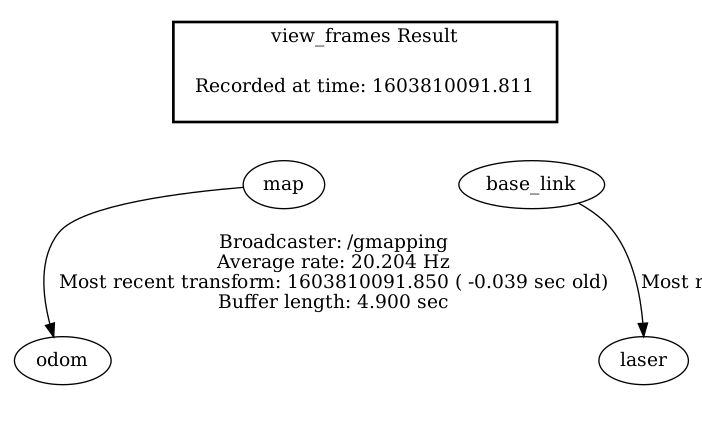
which I dont think is right
The correction is to remove the contional if for the node tag in the posted xml:
<node if="$(arg use_rosbot)" pkg="tutorial_pkg" type="drive_controller_node" name="drive_controller"/>
so that it reads:
<node pkg="tutorial_pkg" type="drive_controller_node" name="drive_controller"/>
Using this unconditioned node for the ROSbot Pro eliminates the warning and creates the appropriate tf tree:
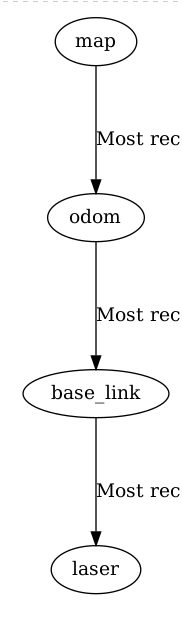
This ( I think ) is because both ROSbot 2.0 and ROSbot Pro 2.0 both require the drive_controller_node to be launched.
Am I correct in this?
Do the tutorials need to be updated for this correction?
Thanks
Joshua