Hello,
I have 2 ROSbot 2 PROs that are on the newest version of the humble rosbot docker container (humble-0.14.0-20250319 as of writing this) which must be on the same network but work independently. I have set it up so that each ROSbot has its own distinct namespace in the rosbot and rplidar containers as follows:
x-common-config:
&common-config
network_mode: host
ipc: host
restart: unless-stopped
environment:
- USER
- ROBOT_NAMESPACE
services:
rosbot:
image: husarion/rosbot:humble-0.14.0-20250319
container_name: rosbot
<<: *common-config
devices:
- ${SERIAL_PORT:-/dev/ttyUSB0}
- /dev/bus/usb/ # FTDI
command: >
ros2 launch rosbot_bringup bringup.launch.py
mecanum:=${MECANUM:-False}
serial_port:=${SERIAL_PORT:-/dev/ttyUSB0}
namespace:=robot1
astra:
image: husarion/astra:humble
container_name: astra
<<: *common-config
devices:
- /dev/bus/usb/
command: >
ros2 launch /husarion_utils/astra.launch.py
device_namespace:=camera
rplidar:
image: husarion/rplidar:humble
container_name: rplidar
<<: *common-config
devices:
- /dev/ttyRPLIDAR:/dev/ttyUSB0
command: >
ros2 launch /husarion_utils/rplidar.launch.py
serial_baudrate:=${RPLIDAR_BAUDRATE:-256000}
robot_namespace:=robot1
Thus, I get the following topic list (The other robot has a namespace of robot2):
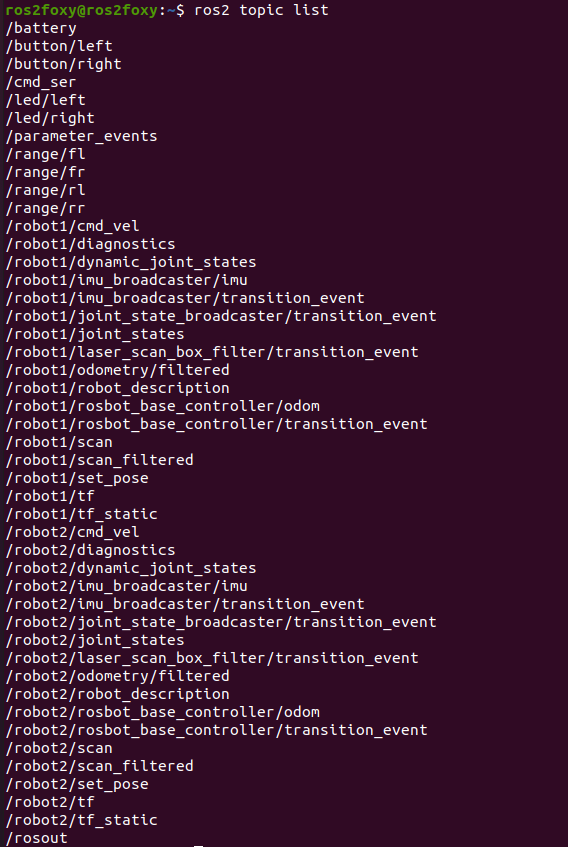
The main issue lies with the rosbot container. When sending a movement command to a specific robot (For example, through using “ros2 run teleop_twist_keyboard teleop_twist_keyboard --ros-args -r __ns:=/robot1”), both robots will respond to the same command despite using different namespaces (Unintended behavior). However, when broadcasting to a namespace that does not exist, neither robot will respond (Intended behavior).
Is there a fix for this? I want both rosbots to be using the same domain ID but respond by using different namespaces. I additionally want to use the docker containers instead of the new snaps.
EDIT: I have also tried using the environment variable “ROBOT_NAMESPACE = robot1” and removing the namespace argument from the rosbot launch command. Same issue persists.
")