Hello!
I am a new learner of ROSBOT2R.
Please kindly let me know how to set up serial port env when i use remote desktop from xrdp although it works on direct connection.
gcold
Hello!
I am a new learner of ROSBOT2R.
Please kindly let me know how to set up serial port env when i use remote desktop from xrdp although it works on direct connection.
gcold
Hello @goldcold and welcome to Husarion Community!
If you want “Remote Desktop” feature to work on ROSbot 2R, try a very simple example from this repository. In the README file, everything is clearly explained.
Best regards
Jan Brzyk
Really thanks for your reply.
I will try it.
And does it mean that docker cannot be pulled in remote desktop over local network?
Best Regards
goldcold
@goldcold, if I understand you well, there is no difference between approach to connecting to your ROSbot (LAN, Husarnet, Ethernet cable, Remote Desktop) when speaking about pulling docker images.
Best regards
Jan Brzyk
In my case, i cannot pull up docker and not get fully desktop(full env) when connecting with xrdp /local internet. It needs to logout direct connection everytimes to get full desktop.I want to use remotely for running rosbot.Is there any suggestion for my case?
Thanks always for your support.
gcold
@goldcold, I need to ask if your ROSbot has internet access? For example, try ping google.com command.
Best regards
Jan Brzyk
Yes,my internet is working fine and the case is just missing serial port and display environment when connecting from remote desktop.printenv result is full enough when connecting directly(HDML) although it misses some environment in remote desktop.
Best regards
gcold
The problem you describe is quite unusual. I suggest flashing the OS image again to be sure of restoring factory settings. System images for ROSbot 2R can be found here. If you need help choosing the right one, write here.
Remember that this action involves a memory reset in ROSbot.
Best regards
Jan Brzyk
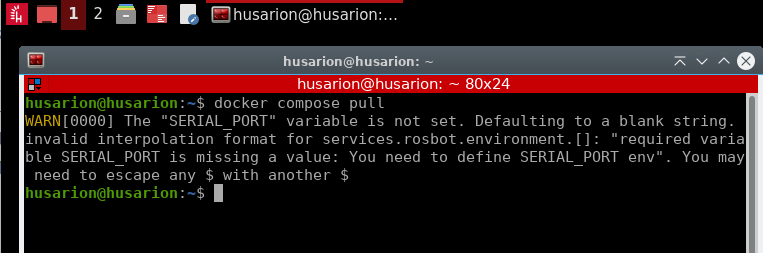
It is the third time of system reinstallation and I can perfectly pull docker in direct connection(display+keyboard+mouse). But I got this warning in pulling docker from remote desktop. I think I should set serial port /dev/ttyAMA0 for remote desktop.
So, I tried to use rosbot locally with rosserial and rosbot_ekf.
I used camera and rplidar driver from https://github.com/orbbec/ros_astra_camera and https://github.com/Slamtec/rplidar_ros
But I got this error(Operation time out, RESULT_OPERATION_TIMEOUT!) in running rplidar.
After cloning astra package for camera ,running SBC stop in 85% of catkin_make.
Feel sorry for asking so many questions and hope to support for my forward learning.
Best Regards
gcold
Hello @goldcold,
let’s begin with the SERIAL_PORT error.
What OS Image do you use?
Best regards
Jan Brzyk
I am using ROS Noetic OS image for ROSbot2R.
Before running docker compose pull run:
export DISPLAY=:0
according to How To Start Tutorial
Best regards
Jan Brzyk
@goldcold also set the SERIAL_PORT variable:
export SERIAL_PORT=/dev/ttyAMA0
It should be set by default in the fresh Noetic OS image, but it can help.
Best regards
Jan Brzyk
Thanks for your support. It works.
Astra images in compose file is in error and how should i do it.
Best regards
gcold
Hello @goldcold,
if your approach is to use Docker / Docker Compose files, I suggest using dockerized setup for Astra camera as well. The answer to your problems is probably in this repository:
Best regards
Jan Brzyk
Thank you for your response.
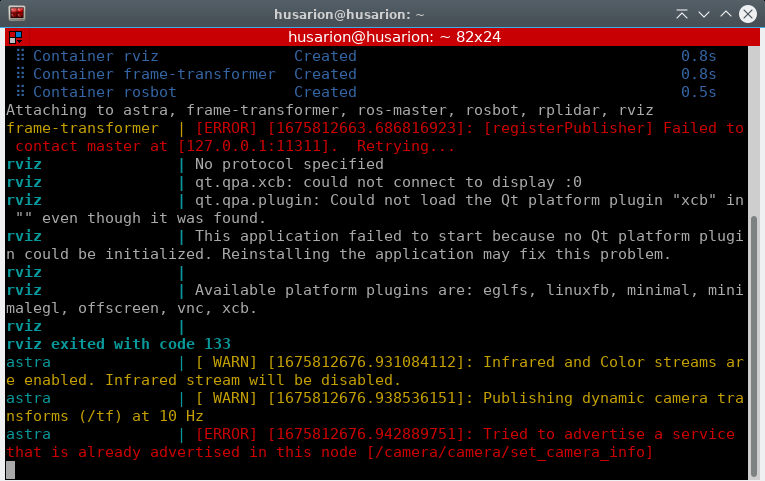
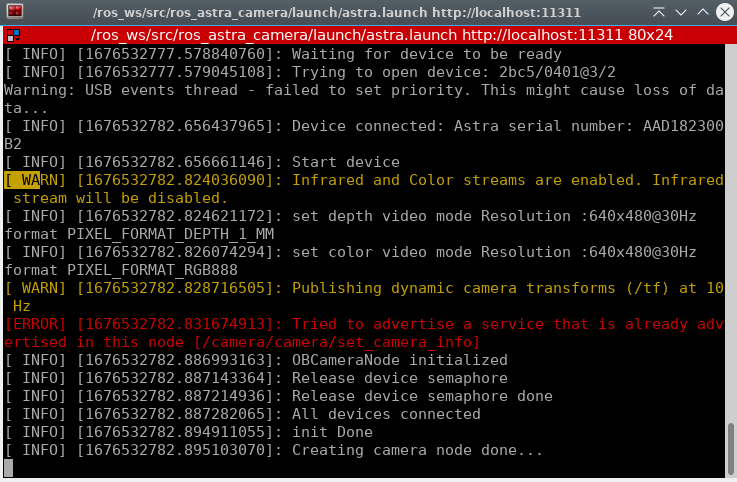
Now, I can use camera node but it still has been remaining this error.
Best Regards
gcold
Hello @goldcold
okay, how do you launch this system?
The repository I sent you is based on Docker/Docker Compose and should be run that way. Docker ensures that, regardless of software differences, the system will run the same on different machines.
Best regards
Jan Brzyk