The full output
husarion@test-612836-2307:~$ roslaunch tutorial_pkg pathplana.launch
… logging to /home/husarion/.ros/log/87718bd8-dfa0-11e9-83c8-409f384f007f/roslaunch-test-612836-2307-13945.log
Checking log directory for disk usage. This may take awhile.
Press Ctrl-C to interrupt
Done checking log file disk usage. Usage is <1GB.
started roslaunch server http://test-612836-2307:34425/
SUMMARY
PARAMETERS
- /amcl/base_frame_id: base_link
- /amcl/min_particles: 500
- /amcl/odom_frame_id: odom
- /amcl/odom_model_type: diff
- /amcl/update_min_a: 0.1
- /amcl/update_min_d: 0.05
- /move_base/TrajectoryPlannerROS/acc_lim_Y: 2.5
- /move_base/TrajectoryPlannerROS/acc_lim_theta: 0.25
- /move_base/TrajectoryPlannerROS/acc_lim_x: 2.5
- /move_base/TrajectoryPlannerROS/holonomic_robot: False
- /move_base/TrajectoryPlannerROS/max_vel_theta: 0.35
- /move_base/TrajectoryPlannerROS/max_vel_x: 0.2
- /move_base/TrajectoryPlannerROS/meter_scoring: True
- /move_base/TrajectoryPlannerROS/min_in_place_vel_theta: 0.25
- /move_base/TrajectoryPlannerROS/min_vel_theta: -0.35
- /move_base/TrajectoryPlannerROS/min_vel_x: 0.1
- /move_base/TrajectoryPlannerROS/xy_goal_tolerance: 0.15
- /move_base/TrajectoryPlannerROS/yaw_goal_tolerance: 0.25
- /move_base/controller_frequency: 10.0
- /move_base/global_costmap/always_send_full_costmap: True
- /move_base/global_costmap/footprint: [[0.12, 0.14], [0…
- /move_base/global_costmap/global_frame: map
- /move_base/global_costmap/height: 15
- /move_base/global_costmap/inflation_radius: 2.5
- /move_base/global_costmap/laser_scan_sensor/clearing: True
- /move_base/global_costmap/laser_scan_sensor/data_type: LaserScan
- /move_base/global_costmap/laser_scan_sensor/marking: True
- /move_base/global_costmap/laser_scan_sensor/sensor_frame: laser_frame
- /move_base/global_costmap/laser_scan_sensor/topic: scan
- /move_base/global_costmap/map_topic: /map
- /move_base/global_costmap/observation_sources: laser_scan_sensor
- /move_base/global_costmap/obstacle_range: 6.0
- /move_base/global_costmap/origin_x: -7.5
- /move_base/global_costmap/origin_y: -7.5
- /move_base/global_costmap/publish_frequency: 2.5
- /move_base/global_costmap/raytrace_range: 8.5
- /move_base/global_costmap/resolution: 0.1
- /move_base/global_costmap/robot_base_frame: base_link
- /move_base/global_costmap/rolling_window: True
- /move_base/global_costmap/static_map: True
- /move_base/global_costmap/subscribe_to_updates: True
- /move_base/global_costmap/transform_tolerance: 0.5
- /move_base/global_costmap/update_frequency: 2.5
- /move_base/global_costmap/width: 15
- /move_base/local_costmap/always_send_full_costmap: True
- /move_base/local_costmap/footprint: [[0.12, 0.14], [0…
- /move_base/local_costmap/global_frame: map
- /move_base/local_costmap/height: 3
- /move_base/local_costmap/inflation_radius: 0.6
- /move_base/local_costmap/laser_scan_sensor/clearing: True
- /move_base/local_costmap/laser_scan_sensor/data_type: LaserScan
- /move_base/local_costmap/laser_scan_sensor/marking: True
- /move_base/local_costmap/laser_scan_sensor/sensor_frame: laser_frame
- /move_base/local_costmap/laser_scan_sensor/topic: scan
- /move_base/local_costmap/map_topic: /map
- /move_base/local_costmap/observation_sources: laser_scan_sensor
- /move_base/local_costmap/obstacle_range: 6.0
- /move_base/local_costmap/origin_x: -1.5
- /move_base/local_costmap/origin_y: -1.5
- /move_base/local_costmap/publish_frequency: 5
- /move_base/local_costmap/raytrace_range: 8.5
- /move_base/local_costmap/resolution: 0.1
- /move_base/local_costmap/robot_base_frame: base_link
- /move_base/local_costmap/rolling_window: True
- /move_base/local_costmap/static_map: False
- /move_base/local_costmap/subscribe_to_updates: True
- /move_base/local_costmap/transform_tolerance: 0.25
- /move_base/local_costmap/update_frequency: 5
- /move_base/local_costmap/width: 3
- /rosdistro: kinetic
- /rosversion: 1.12.13
- /rplidar/angle_compensate: True
- /rplidar/serial_baudrate: 115200
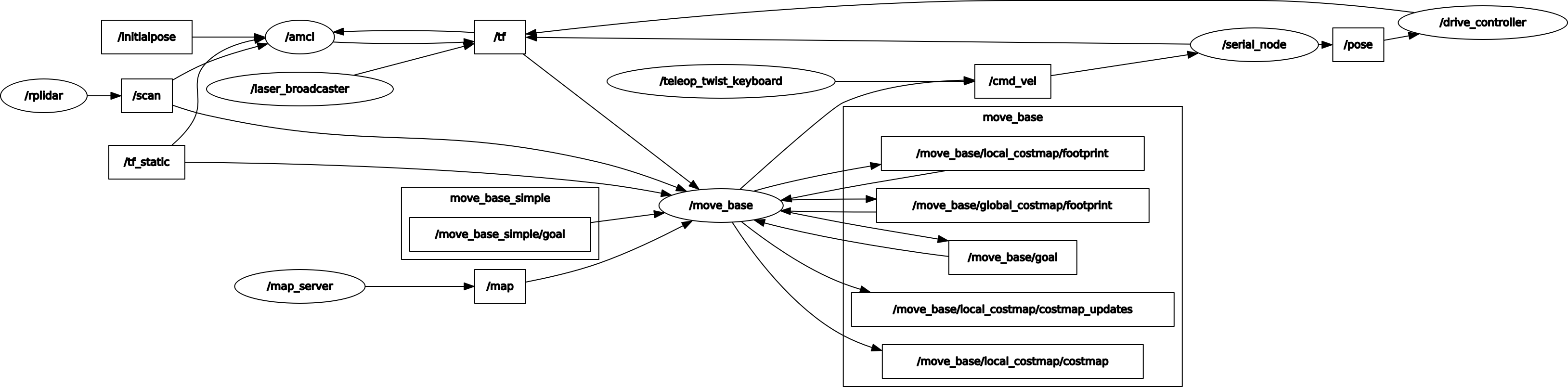
NODES
/
amcl (amcl/amcl)
drive_controller (tutorial_pkg/drive_controller_node)
laser_broadcaster (tf/static_transform_publisher)
map_server (map_server/map_server)
move_base (move_base/move_base)
rplidar (rplidar_ros/rplidarNode)
rviz (rviz/rviz)
teleop_twist_keyboard (teleop_twist_keyboard/teleop_twist_keyboard.py)
ROS_MASTER_URI=http://master:11311
process[rplidar-1]: started with pid [14008]
process[drive_controller-2]: started with pid [14009]
process[laser_broadcaster-3]: started with pid [14011]
process[teleop_twist_keyboard-4]: started with pid [14018]
process[rviz-5]: started with pid [14031]
process[map_server-6]: started with pid [14039]
process[amcl-7]: started with pid [14043]
process[move_base-8]: started with pid [14048]
libEGL warning: DRI2: failed to authenticate
[ INFO] [1569423894.607858684]: Requesting the map…
[ INFO] [1569423894.671302017]: Received a 1984 X 1984 map @ 0.100 m/pix
[ INFO] [1569423895.321322601]: Initializing likelihood field model; this can take some time on large maps…
Reading from the keyboard and Publishing to Twist!
Moving around:
u i o
j k l
m , .
For Holonomic mode (strafing), hold down the shift key:
U I O
J K L
M < >
t : up (+z)
b : down (-z)
anything else : stop
q/z : increase/decrease max speeds by 10%
w/x : increase/decrease only linear speed by 10%
e/c : increase/decrease only angular speed by 10%
CTRL-C to quit
currently: speed 0.5 turn 1.0
[ INFO] [1569423895.952725226]: Done initializing likelihood field model.
[ INFO] [1569423896.389048934]: Using plugin “static_layer”
[ INFO] [1569423896.434599684]: Requesting the map…
[ INFO] [1569423896.661932268]: Resizing static layer to 1984 X 1984 at 0.100000 m/pix
[ INFO] [1569423896.755629601]: Received a 1984 X 1984 map at 0.100000 m/pix
[ INFO] [1569423896.770436351]: Using plugin “obstacle_layer”
[ INFO] [1569423896.780435268]: Subscribed to Topics: laser_scan_sensor
[ INFO] [1569423896.880254976]: Using plugin “inflation_layer”
[ INFO] [1569423897.141398435]: Using plugin “obstacle_layer”
[ INFO] [1569423897.153027768]: Subscribed to Topics: laser_scan_sensor
[ INFO] [1569423897.261651435]: Using plugin “inflation_layer”
[ INFO] [1569423897.515612893]: Created local_planner base_local_planner/TrajectoryPlannerROS
[ INFO] [1569423897.567237602]: Sim period is set to 0.10
[ INFO] [1569423898.282345352]: Recovery behavior will clear layer obstacles
[ INFO] [1569423898.302989810]: Recovery behavior will clear layer obstacles
[ WARN] [1569423900.634068853]: Costmap2DROS transform timeout. Current time: 1569423900.6340, global_pose stamp: 1569423900.3816, tolerance: 0.2500
[ WARN] [1569423900.634182311]: Could not get robot pose, cancelling reconfiguration
[ WARN] [1569423901.662777770]: Costmap2DROS transform timeout. Current time: 1569423901.6627, global_pose stamp: 1569423901.4115, tolerance: 0.2500
[ WARN] [1569423903.462789271]: Costmap2DROS transform timeout. Current time: 1569423903.4627, global_pose stamp: 1569423903.2071, tolerance: 0.2500
[ WARN] [1569423904.233718521]: Could not get robot pose, cancelling reconfiguration
[ WARN] [1569423910.634609816]: Costmap2DROS transform timeout. Current time: 1569423910.6343, global_pose stamp: 1569423910.3815, tolerance: 0.2500
[ WARN] [1569423910.634802316]: Could not get robot pose, cancelling reconfiguration
[ WARN] [1569423912.934297067]: Costmap2DROS transform timeout. Current time: 1569423912.9342, global_pose stamp: 1569423912.6815, tolerance: 0.2500
[ WARN] [1569423912.934418401]: Could not get robot pose, cancelling reconfiguration
[ WARN] [1569423914.462819985]: Costmap2DROS transform timeout. Current time: 1569423914.4627, global_pose stamp: 1569423914.2116, tolerance: 0.2500
[ WARN] [1569423919.062811362]: Costmap2DROS transform timeout. Current time: 1569423919.0627, global_pose stamp: 1569423918.8116, tolerance: 0.2500
[ WARN] [1569423923.934224823]: Costmap2DROS transform timeout. Current time: 1569423923.9341, global_pose stamp: 1569423923.6816, tolerance: 0.2500
[ WARN] [1569423923.934354031]: Could not get robot pose, cancelling reconfiguration
[ WARN] [1569423927.262824282]: Costmap2DROS transform timeout. Current time: 1569423927.2627, global_pose stamp: 1569423927.0116, tolerance: 0.2500
[ WARN] [1569423928.033917450]: Could not get robot pose, cancelling reconfiguration
[ WARN] [1569423930.333657784]: Costmap2DROS transform timeout. Current time: 1569423930.3336, global_pose stamp: 1569423930.0815, tolerance: 0.2500
[ WARN] [1569423930.333771242]: Could not get robot pose, cancelling reconfiguration
[ WARN] [1569423934.933939661]: Costmap2DROS transform timeout. Current time: 1569423934.9338, global_pose stamp: 1569423934.6816, tolerance: 0.2500
[ WARN] [1569423934.934187869]: Could not get robot pose, cancelling reconfiguration
[ WARN] [1569423936.462785745]: Costmap2DROS transform timeout. Current time: 1569423936.4627, global_pose stamp: 1569423936.2115, tolerance: 0.2500
[ WARN] [1569423936.735306537]: Could not get robot pose, cancelling reconfiguration
[ WARN] [1569423938.262797246]: Costmap2DROS transform timeout. Current time: 1569423938.2627, global_pose stamp: 1569423938.0116, tolerance: 0.2500
[ WARN] [1569423940.062790955]: Costmap2DROS transform timeout. Current time: 1569423940.0627, global_pose stamp: 1569423939.8115, tolerance: 0.2500
[ WARN] [1569423940.833843289]: Could not get robot pose, cancelling reconfiguration
[ WARN] [1569423941.862804206]: Costmap2DROS transform timeout. Current time: 1569423941.8627, global_pose stamp: 1569423941.6116, tolerance: 0.2500
[ WARN] [1569423943.934175665]: Costmap2DROS transform timeout. Current time: 1569423943.9341, global_pose stamp: 1569423943.6815, tolerance: 0.2500
[ WARN] [1569423943.934309832]: Could not get robot pose, cancelling reconfiguration
[ WARN] [1569423948.033883167]: Costmap2DROS transform timeout. Current time: 1569423948.0338, global_pose stamp: 1569423947.7815, tolerance: 0.2500
[ WARN] [1569423948.034006251]: Could not get robot pose, cancelling reconfiguration
[ WARN] [1569423949.062811418]: Costmap2DROS transform timeout. Current time: 1569423949.0627, global_pose stamp: 1569423948.8116, tolerance: 0.2500
[ WARN] [1569423949.334420168]: Could not get robot pose, cancelling reconfiguration
[ WARN] [1569423952.862838420]: Costmap2DROS transform timeout. Current time: 1569423952.8627, global_pose stamp: 1569423952.6116, tolerance: 0.2500
[ WARN] [1569423960.062838631]: Costmap2DROS transform timeout. Current time: 1569423960.0627, global_pose stamp: 1569423959.8115, tolerance: 0.2500
[ WARN] [1569423963.134424050]: Costmap2DROS transform timeout. Current time: 1569423963.1343, global_pose stamp: 1569423962.8815, tolerance: 0.2500
[ WARN] [1569423963.134552675]: Could not get robot pose, cancelling reconfiguration