So I created a new workspace and tried it out. No success. Attached all corresponding files and screenshots to reproduce.
Screenshot from rviz showing a correctly working lidar:
Logfiles:
Gmapping:
e[0m[ INFO] [1530795089.834763124]: Laser is mounted upwards.e[0m
-maxUrange 11.99 -maxUrange 11.99 -sigma 0.05 -kernelSize 1 -lstep 0.05 -lobsGain 3 -astep 0.05
-srr 0.1 -srt 0.2 -str 0.1 -stt 0.2
-linearUpdate 1 -angularUpdate 0.5 -resampleThreshold 0.5
-xmin -100 -xmax 100 -ymin -100 -ymax 100 -delta 0.1 -particles 30
e[0m[ INFO] [1530795089.850418624]: Initialization completee[0m
update frame 0
update ld=0 ad=0
m_count 0
Registering First Scan
Master log:
[rosmaster.main][INFO] 2018-07-05 14:51:26,227: initialization complete, waiting for shutdown
[rosmaster.main][INFO] 2018-07-05 14:51:26,227: Starting ROS Master Node
[xmlrpc][INFO] 2018-07-05 14:51:26,238: XML-RPC server binding to :::11311
[xmlrpc][INFO] 2018-07-05 14:51:26,239: binding ipv6 xmlrpc socket to('::', 11311)
[xmlrpc][INFO] 2018-07-05 14:51:26,239: bound to ('::', 11311)
[xmlrpc][INFO] 2018-07-05 14:51:26,239: Started XML-RPC server [http://husarion-2469:11311/]
[rosmaster.master][INFO] 2018-07-05 14:51:26,240: Master initialized: port[11311], uri[http://husarion-2469:11311/]
[xmlrpc][INFO] 2018-07-05 14:51:26,240: xml rpc node: starting XML-RPC server
[rosmaster.master][INFO] 2018-07-05 14:51:26,342: +PARAM [/run_id] by /roslaunch
[rosmaster.master][INFO] 2018-07-05 14:51:26,345: +PARAM [/roslaunch/uris/host_husarion_2469__44774] by /roslaunch
[rosmaster.master][INFO] 2018-07-05 14:51:26,443: +PARAM [/rosversion] by /roslaunch
[rosmaster.master][INFO] 2018-07-05 14:51:26,444: +PARAM [/gmapping/odom_frame] by /roslaunch
[rosmaster.master][INFO] 2018-07-05 14:51:26,444: +PARAM [/rosdistro] by /roslaunch
[rosmaster.master][INFO] 2018-07-05 14:51:26,444: +PARAM [/gmapping/delta] by /roslaunch
[rosmaster.master][INFO] 2018-07-05 14:51:26,445: +PARAM [/gmapping/base_frame] by /roslaunch
[rosmaster.master][INFO] 2018-07-05 14:51:26,461: +SERVICE [/rosout/get_loggers] /rosout http://husarion-2469:44562/
[rosmaster.master][INFO] 2018-07-05 14:51:26,464: +SERVICE [/rosout/set_logger_level] /rosout http://husarion-2469:44562/
[rosmaster.master][INFO] 2018-07-05 14:51:26,471: +PUB [/rosout_agg] /rosout http://husarion-2469:44562/
[rosmaster.master][INFO] 2018-07-05 14:51:26,488: +SUB [/rosout] /rosout http://husarion-2469:44562/
[rosmaster.master][INFO] 2018-07-05 14:51:26,558: +PUB [/rosout] /rplidar http://husarion-2469:38235/
[rosmaster.master][INFO] 2018-07-05 14:51:26,579: +PUB [/rosout] /drive_controller http://husarion-2469:34701/
[rosmaster.master][INFO] 2018-07-05 14:51:26,588: +SERVICE [/rplidar/get_loggers] /rplidar http://husarion-2469:38235/
[rosmaster.master][INFO] 2018-07-05 14:51:26,590: +SERVICE [/drive_controller/get_loggers] /drive_controller http://husarion-2469:34701/
[rosmaster.master][INFO] 2018-07-05 14:51:26,593: +SERVICE [/rplidar/set_logger_level] /rplidar http://husarion-2469:38235/
[rosmaster.master][INFO] 2018-07-05 14:51:26,596: +SERVICE [/drive_controller/set_logger_level] /drive_controller http://husarion-2469:34701/
[rosmaster.master][INFO] 2018-07-05 14:51:26,607: +PUB [/scan] /rplidar http://husarion-2469:38235/
[rosmaster.master][INFO] 2018-07-05 14:51:26,628: +PUB [/rosout] /laser_broadcaster http://husarion-2469:34879/
[rosmaster.master][INFO] 2018-07-05 14:51:26,629: publisherUpdate[/rosout] -> http://husarion-2469:44562/ ['http://husarion-2469:38235/']
[rosmaster.master][INFO] 2018-07-05 14:51:26,641: publisherUpdate[/rosout] -> http://husarion-2469:44562/ ['http://husarion-2469:38235/']: sec=0.01, result=[1, '', 0]
[rosmaster.master][INFO] 2018-07-05 14:51:26,641: publisherUpdate[/rosout] -> http://husarion-2469:44562/ ['http://husarion-2469:38235/', 'http://husarion-2469:34701/']
[rosmaster.master][INFO] 2018-07-05 14:51:26,645: publisherUpdate[/rosout] -> http://husarion-2469:44562/ ['http://husarion-2469:38235/', 'http://husarion-2469:34701/']: sec=0.00, result=[1, '', 0]
[rosmaster.master][INFO] 2018-07-05 14:51:26,647: publisherUpdate[/rosout] -> http://husarion-2469:44562/ ['http://husarion-2469:38235/', 'http://husarion-2469:34701/', 'http://husarion-2469:34879/']
[rosmaster.master][INFO] 2018-07-05 14:51:26,650: publisherUpdate[/rosout] -> http://husarion-2469:44562/ ['http://husarion-2469:38235/', 'http://husarion-2469:34701/', 'http://husarion-2469:34879/']: sec=0.00, result=[1, '', 0]
[rosmaster.master][INFO] 2018-07-05 14:51:26,650: +SERVICE [/laser_broadcaster/get_loggers] /laser_broadcaster http://husarion-2469:34879/
[rosmaster.master][INFO] 2018-07-05 14:51:26,662: +PUB [/rosout] /gmapping http://husarion-2469:45341/
[rosmaster.master][INFO] 2018-07-05 14:51:26,665: +SERVICE [/laser_broadcaster/set_logger_level] /laser_broadcaster http://husarion-2469:34879/
[rosmaster.master][INFO] 2018-07-05 14:51:26,670: +SERVICE [/gmapping/get_loggers] /gmapping http://husarion-2469:45341/
[rosmaster.master][INFO] 2018-07-05 14:51:26,679: +SUB [/pose] /drive_controller http://husarion-2469:34701/
[rosmaster.master][INFO] 2018-07-05 14:51:26,686: +SERVICE [/gmapping/set_logger_level] /gmapping http://husarion-2469:45341/
[rosmaster.master][INFO] 2018-07-05 14:51:26,687: +PUB [/tf] /laser_broadcaster http://husarion-2469:34879/
[rosmaster.master][INFO] 2018-07-05 14:51:26,706: +SUB [/tf] /gmapping http://husarion-2469:45341/
[rosmaster.master][INFO] 2018-07-05 14:51:26,726: +SUB [/tf_static] /gmapping http://husarion-2469:45341/
[rosmaster.master][INFO] 2018-07-05 14:51:26,729: +PUB [/tf] /gmapping http://husarion-2469:45341/
[rosmaster.master][INFO] 2018-07-05 14:51:26,730: publisherUpdate[/rosout] -> http://husarion-2469:44562/ ['http://husarion-2469:38235/', 'http://husarion-2469:34701/', 'http://husarion-2469:34879/', 'http://husarion-2469:45341/']
[rosmaster.master][INFO] 2018-07-05 14:51:26,730: publisherUpdate[/tf] -> http://husarion-2469:45341/ ['http://husarion-2469:34879/', 'http://husarion-2469:45341/']
[rosmaster.master][INFO] 2018-07-05 14:51:26,733: publisherUpdate[/tf] -> http://husarion-2469:45341/ ['http://husarion-2469:34879/', 'http://husarion-2469:45341/']: sec=0.00, result=[1, '', 0]
[rosmaster.master][INFO] 2018-07-05 14:51:26,734: publisherUpdate[/rosout] -> http://husarion-2469:44562/ ['http://husarion-2469:38235/', 'http://husarion-2469:34701/', 'http://husarion-2469:34879/', 'http://husarion-2469:45341/']: sec=0.00, result=[1, '', 0]
[rosmaster.master][INFO] 2018-07-05 14:51:26,813: +PUB [/gmapping/entropy] /gmapping http://husarion-2469:45341/
[rosmaster.master][INFO] 2018-07-05 14:51:26,821: +PUB [/map] /gmapping http://husarion-2469:45341/
[rosmaster.master][INFO] 2018-07-05 14:51:26,825: +PUB [/map_metadata] /gmapping http://husarion-2469:45341/
[rosmaster.master][INFO] 2018-07-05 14:51:26,827: +SERVICE [/dynamic_map] /gmapping http://husarion-2469:45341/
[rosmaster.master][INFO] 2018-07-05 14:51:26,851: +SUB [/scan] /gmapping http://husarion-2469:45341/
[rosmaster.master][INFO] 2018-07-05 14:51:27,145: +PUB [/rosout] /serial_node http://husarion-2469:45945/
[rosmaster.master][INFO] 2018-07-05 14:51:27,152: publisherUpdate[/rosout] -> http://husarion-2469:44562/ ['http://husarion-2469:38235/', 'http://husarion-2469:34701/', 'http://husarion-2469:34879/', 'http://husarion-2469:45341/', 'http://husarion-2469:45945/']
[rosmaster.master][INFO] 2018-07-05 14:51:27,154: +SERVICE [/serial_node/get_loggers] /serial_node http://husarion-2469:45945/
[rosmaster.master][INFO] 2018-07-05 14:51:27,154: publisherUpdate[/rosout] -> http://husarion-2469:44562/ ['http://husarion-2469:38235/', 'http://husarion-2469:34701/', 'http://husarion-2469:34879/', 'http://husarion-2469:45341/', 'http://husarion-2469:45945/']: sec=0.00, result=[1, '', 0]
[rosmaster.master][INFO] 2018-07-05 14:51:27,157: +SERVICE [/serial_node/set_logger_level] /serial_node http://husarion-2469:45945/
[rosmaster.master][INFO] 2018-07-05 14:51:27,180: +PUB [/diagnostics] /serial_node http://husarion-2469:45945/
[rosmaster.master][INFO] 2018-07-05 14:51:27,198: +SERVICE [/stop_motor] /rplidar http://husarion-2469:38235/
[rosmaster.master][INFO] 2018-07-05 14:51:27,200: +SERVICE [/start_motor] /rplidar http://husarion-2469:38235/
[rosmaster.master][INFO] 2018-07-05 14:51:29,323: +PUB [/battery] /serial_node http://husarion-2469:45945/
[rosmaster.master][INFO] 2018-07-05 14:51:29,335: +PUB [/pose] /serial_node http://husarion-2469:45945/
[rosmaster.master][INFO] 2018-07-05 14:51:29,339: publisherUpdate[/pose] -> http://husarion-2469:34701/ ['http://husarion-2469:45945/']
[rosmaster.master][INFO] 2018-07-05 14:51:29,343: publisherUpdate[/pose] -> http://husarion-2469:34701/ ['http://husarion-2469:45945/']: sec=0.00, result=[1, '', 0]
[rosmaster.master][INFO] 2018-07-05 14:51:29,348: +SUB [/cmd_vel] /serial_node http://husarion-2469:45945/
[rosmaster.master][INFO] 2018-07-05 14:51:29,364: +SUB [/reset_odom] /serial_node http://husarion-2469:45945/
[rosmaster.master][INFO] 2018-07-05 14:51:29,490: +PUB [/tf] /drive_controller http://husarion-2469:34701/
[rosmaster.master][INFO] 2018-07-05 14:51:29,541: publisherUpdate[/tf] -> http://husarion-2469:45341/ ['http://husarion-2469:34879/', 'http://husarion-2469:45341/', 'http://husarion-2469:34701/']
[rosmaster.master][INFO] 2018-07-05 14:51:29,545: publisherUpdate[/tf] -> http://husarion-2469:45341/ ['http://husarion-2469:34879/', 'http://husarion-2469:45341/', 'http://husarion-2469:34701/']: sec=0.00, result=[1, '', 0]
[rosmaster.master][INFO] 2018-07-05 14:51:38,858: +PARAM [/roslaunch/uris/host_husarion_2469__41861] by /roslaunch
[rosmaster.master][INFO] 2018-07-05 14:51:38,868: +PARAM [/rosversion] by /roslaunch
[rosmaster.master][INFO] 2018-07-05 14:51:38,869: +PARAM [/rosdistro] by /roslaunch
[rosmaster.master][INFO] 2018-07-05 14:51:39,966: +PUB [/cmd_vel] /teleop_twist_keyboard http://husarion-2469:46639/
[rosmaster.master][INFO] 2018-07-05 14:51:39,976: publisherUpdate[/cmd_vel] -> http://husarion-2469:45945/ ['http://husarion-2469:46639/']
[rosmaster.master][INFO] 2018-07-05 14:51:39,980: publisherUpdate[/cmd_vel] -> http://husarion-2469:45945/ ['http://husarion-2469:46639/']: sec=0.00, result=[1, '', 0]
[rosmaster.master][INFO] 2018-07-05 14:51:40,063: +PUB [/rosout] /teleop_twist_keyboard http://husarion-2469:46639/
[rosmaster.master][INFO] 2018-07-05 14:51:40,071: +SERVICE [/teleop_twist_keyboard/get_loggers] /teleop_twist_keyboard http://husarion-2469:46639/
[rosmaster.master][INFO] 2018-07-05 14:51:40,075: +SERVICE [/teleop_twist_keyboard/set_logger_level] /teleop_twist_keyboard http://husarion-2469:46639/
[rosmaster.master][INFO] 2018-07-05 14:51:40,082: publisherUpdate[/rosout] -> http://husarion-2469:44562/ ['http://husarion-2469:38235/', 'http://husarion-2469:34701/', 'http://husarion-2469:34879/', 'http://husarion-2469:45341/', 'http://husarion-2469:45945/', 'http://husarion-2469:46639/']
[rosmaster.master][INFO] 2018-07-05 14:51:40,085: publisherUpdate[/rosout] -> http://husarion-2469:44562/ ['http://husarion-2469:38235/', 'http://husarion-2469:34701/', 'http://husarion-2469:34879/', 'http://husarion-2469:45341/', 'http://husarion-2469:45945/', 'http://husarion-2469:46639/']: sec=0.00, result=[1, '', 0]
[rosmaster.master][INFO] 2018-07-05 14:52:33,327: +PUB [/rosout] /rviz_1530795153318604030 http://husarion-2469:38087/
[rosmaster.master][INFO] 2018-07-05 14:52:33,330: +SERVICE [/rviz_1530795153318604030/get_loggers] /rviz_1530795153318604030 http://husarion-2469:38087/
[rosmaster.master][INFO] 2018-07-05 14:52:33,332: +SERVICE [/rviz_1530795153318604030/set_logger_level] /rviz_1530795153318604030 http://husarion-2469:38087/
[rosmaster.master][INFO] 2018-07-05 14:52:33,359: publisherUpdate[/rosout] -> http://husarion-2469:44562/ ['http://husarion-2469:38235/', 'http://husarion-2469:34701/', 'http://husarion-2469:34879/', 'http://husarion-2469:45341/', 'http://husarion-2469:45945/', 'http://husarion-2469:46639/', 'http://husarion-2469:38087/']
[rosmaster.master][INFO] 2018-07-05 14:52:33,365: publisherUpdate[/rosout] -> http://husarion-2469:44562/ ['http://husarion-2469:38235/', 'http://husarion-2469:34701/', 'http://husarion-2469:34879/', 'http://husarion-2469:45341/', 'http://husarion-2469:45945/', 'http://husarion-2469:46639/', 'http://husarion-2469:38087/']: sec=0.00, result=[1, '', 0]
[rosmaster.master][INFO] 2018-07-05 14:52:33,638: +SUB [/tf] /rviz_1530795153318604030 http://husarion-2469:38087/
[rosmaster.master][INFO] 2018-07-05 14:52:33,670: +SUB [/tf_static] /rviz_1530795153318604030 http://husarion-2469:38087/
[rosmaster.master][INFO] 2018-07-05 14:52:33,862: +PUB [/initialpose] /rviz_1530795153318604030 http://husarion-2469:38087/
[rosmaster.master][INFO] 2018-07-05 14:52:33,867: +PUB [/goal] /rviz_1530795153318604030 http://husarion-2469:38087/
[rosmaster.master][INFO] 2018-07-05 14:52:33,908: +SUB [/map] /rviz_1530795153318604030 http://husarion-2469:38087/
[rosmaster.master][INFO] 2018-07-05 14:52:33,919: +SUB [/map_updates] /rviz_1530795153318604030 http://husarion-2469:38087/
[rosmaster.master][INFO] 2018-07-05 14:52:33,935: +SUB [/scan] /rviz_1530795153318604030 http://husarion-2469:38087/
[rosmaster.master][INFO] 2018-07-05 14:52:33,940: -PUB [/goal] /rviz_1530795153318604030 http://husarion-2469:38087/
[rosmaster.master][INFO] 2018-07-05 14:52:33,942: -PUB [/initialpose] /rviz_1530795153318604030 http://husarion-2469:38087/
[rosmaster.master][INFO] 2018-07-05 14:52:33,956: +PUB [/initialpose] /rviz_1530795153318604030 http://husarion-2469:38087/
[rosmaster.master][INFO] 2018-07-05 14:52:33,960: +PUB [/goal] /rviz_1530795153318604030 http://husarion-2469:38087/
[rosmaster.master][INFO] 2018-07-05 14:52:33,962: +PUB [/move_base_simple/goal] /rviz_1530795153318604030 http://husarion-2469:38087/
[rosmaster.master][INFO] 2018-07-05 14:52:33,964: -PUB [/goal] /rviz_1530795153318604030 http://husarion-2469:38087/
[rosmaster.master][INFO] 2018-07-05 14:52:33,967: +PUB [/clicked_point] /rviz_1530795153318604030 http://husarion-2469:38087/
[rosmaster.master][INFO] 2018-07-05 14:52:35,022: +SERVICE [/rviz_1530795153318604030/reload_shaders] /rviz_1530795153318604030 http://husarion-2469:38087/
[rosmaster.master][INFO] 2018-07-05 14:57:11,841: -SUB [/cmd_vel] /serial_node http://husarion-2469:45945/
[rosmaster.master][INFO] 2018-07-05 14:57:11,842: -SUB [/reset_odom] /serial_node http://husarion-2469:45945/
[rosmaster.master][INFO] 2018-07-05 14:57:11,842: -PUB [/diagnostics] /serial_node http://husarion-2469:45945/
[rosmaster.master][INFO] 2018-07-05 14:57:11,843: -PUB [/battery] /serial_node http://husarion-2469:45945/
[rosmaster.master][INFO] 2018-07-05 14:57:11,843: -PUB [/rosout] /serial_node http://husarion-2469:45945/
[rosmaster.master][INFO] 2018-07-05 14:57:11,844: -PUB [/pose] /serial_node http://husarion-2469:45945/
[rosmaster.master][INFO] 2018-07-05 14:57:11,844: -SERVICE [/serial_node/get_loggers] /serial_node rosrpc://husarion-2469:33258
[rosmaster.master][INFO] 2018-07-05 14:57:11,844: -SERVICE [/serial_node/set_logger_level] /serial_node rosrpc://husarion-2469:33258
[rosmaster.master][INFO] 2018-07-05 14:57:11,870: publisherUpdate[/rosout] -> http://husarion-2469:44562/ ['http://husarion-2469:38235/', 'http://husarion-2469:34701/', 'http://husarion-2469:34879/', 'http://husarion-2469:45341/', 'http://husarion-2469:46639/', 'http://husarion-2469:38087/']
[rosmaster.master][INFO] 2018-07-05 14:57:11,873: publisherUpdate[/rosout] -> http://husarion-2469:44562/ ['http://husarion-2469:38235/', 'http://husarion-2469:34701/', 'http://husarion-2469:34879/', 'http://husarion-2469:45341/', 'http://husarion-2469:46639/', 'http://husarion-2469:38087/']: sec=0.00, result=[1, '', 0]
[rosmaster.master][INFO] 2018-07-05 14:57:11,873: publisherUpdate[/pose] -> http://husarion-2469:34701/ []
[rosmaster.master][INFO] 2018-07-05 14:57:11,875: publisherUpdate[/pose] -> http://husarion-2469:34701/ []: sec=0.00, result=[1, '', 0]
[rosmaster.master][INFO] 2018-07-05 14:57:11,907: -PUB [/rosout] /gmapping http://husarion-2469:45341/
[rosmaster.master][INFO] 2018-07-05 14:57:11,925: -PUB [/tf] /gmapping http://husarion-2469:45341/
[rosmaster.master][INFO] 2018-07-05 14:57:11,935: -PUB [/rosout] /rplidar http://husarion-2469:38235/
[rosmaster.master][INFO] 2018-07-05 14:57:11,939: -PUB [/gmapping/entropy] /gmapping http://husarion-2469:45341/
[rosmaster.master][INFO] 2018-07-05 14:57:11,940: publisherUpdate[/rosout] -> http://husarion-2469:44562/ ['http://husarion-2469:38235/', 'http://husarion-2469:34701/', 'http://husarion-2469:34879/', 'http://husarion-2469:46639/', 'http://husarion-2469:38087/']
[rosmaster.master][INFO] 2018-07-05 14:57:11,940: publisherUpdate[/tf] -> http://husarion-2469:45341/ ['http://husarion-2469:34879/', 'http://husarion-2469:34701/']
[rosmaster.master][INFO] 2018-07-05 14:57:11,944: -PUB [/scan] /rplidar http://husarion-2469:38235/
[rosmaster.master][INFO] 2018-07-05 14:57:11,945: publisherUpdate[/tf] -> http://husarion-2469:45341/ ['http://husarion-2469:34879/', 'http://husarion-2469:34701/']: sec=0.00, exception=<Fault -1: 'publisherUpdate: unknown method name'>
[rosmaster.master][INFO] 2018-07-05 14:57:11,950: publisherUpdate[/rosout] -> http://husarion-2469:44562/ ['http://husarion-2469:38235/', 'http://husarion-2469:34701/', 'http://husarion-2469:34879/', 'http://husarion-2469:46639/', 'http://husarion-2469:38087/']: sec=0.01, result=[1, '', 0]
[rosmaster.master][INFO] 2018-07-05 14:57:11,956: publisherUpdate[/tf] -> http://husarion-2469:38087/ ['http://husarion-2469:34879/', 'http://husarion-2469:34701/']
[rosmaster.master][INFO] 2018-07-05 14:57:11,960: publisherUpdate[/tf] -> http://husarion-2469:38087/ ['http://husarion-2469:34879/', 'http://husarion-2469:34701/']: sec=0.00, result=[1, '', 0]
[rosmaster.master][INFO] 2018-07-05 14:57:11,961: publisherUpdate[/rosout] -> http://husarion-2469:44562/ ['http://husarion-2469:34701/', 'http://husarion-2469:34879/', 'http://husarion-2469:46639/', 'http://husarion-2469:38087/']
[rosmaster.master][INFO] 2018-07-05 14:57:11,963: publisherUpdate[/rosout] -> http://husarion-2469:44562/ ['http://husarion-2469:34701/', 'http://husarion-2469:34879/', 'http://husarion-2469:46639/', 'http://husarion-2469:38087/']: sec=0.00, result=[1, '', 0]
[rosmaster.master][INFO] 2018-07-05 14:57:11,965: -PUB [/map] /gmapping http://husarion-2469:45341/
[rosmaster.master][INFO] 2018-07-05 14:57:11,965: publisherUpdate[/scan] -> http://husarion-2469:45341/ []
[rosmaster.threadpool][ERROR] 2018-07-05 14:57:11,966: Traceback (most recent call last):
File "/opt/ros/kinetic/lib/python2.7/dist-packages/rosmaster/threadpool.py", line 218, in run
result = cmd(*args)
File "/opt/ros/kinetic/lib/python2.7/dist-packages/rosmaster/master_api.py", line 210, in publisher_update_task
ret = xmlrpcapi(api).publisherUpdate('/master', topic, pub_uris)
File "/usr/lib/python2.7/xmlrpclib.py", line 1243, in __call__
return self.__send(self.__name, args)
File "/usr/lib/python2.7/xmlrpclib.py", line 1602, in __request
verbose=self.__verbose
File "/usr/lib/python2.7/xmlrpclib.py", line 1283, in request
return self.single_request(host, handler, request_body, verbose)
File "/usr/lib/python2.7/xmlrpclib.py", line 1316, in single_request
return self.parse_response(response)
File "/usr/lib/python2.7/xmlrpclib.py", line 1493, in parse_response
return u.close()
File "/usr/lib/python2.7/xmlrpclib.py", line 800, in close
raise Fault(**self._stack[0])
Fault: <Fault -1: 'publisherUpdate: unknown method name'>
[rosmaster.master][INFO] 2018-07-05 14:57:11,969: -SERVICE [/rplidar/get_loggers] /rplidar rosrpc://husarion-2469:56053
[rosmaster.master][INFO] 2018-07-05 14:57:11,971: publisherUpdate[/scan] -> http://husarion-2469:38087/ []
[rosmaster.master][INFO] 2018-07-05 14:57:11,972: publisherUpdate[/scan] -> http://husarion-2469:45341/ []: sec=0.00, exception=<Fault -1: 'publisherUpdate: unknown method name'>
[rosmaster.master][INFO] 2018-07-05 14:57:11,975: publisherUpdate[/scan] -> http://husarion-2469:38087/ []: sec=0.00, result=[1, '', 0]
[rosmaster.master][INFO] 2018-07-05 14:57:11,976: publisherUpdate[/map] -> http://husarion-2469:38087/ []
[rosmaster.master][INFO] 2018-07-05 14:57:11,985: publisherUpdate[/map] -> http://husarion-2469:38087/ []: sec=0.01, result=[1, '', 0]
[rosmaster.threadpool][ERROR] 2018-07-05 14:57:11,986: Traceback (most recent call last):
File "/opt/ros/kinetic/lib/python2.7/dist-packages/rosmaster/threadpool.py", line 218, in run
result = cmd(*args)
File "/opt/ros/kinetic/lib/python2.7/dist-packages/rosmaster/master_api.py", line 210, in publisher_update_task
ret = xmlrpcapi(api).publisherUpdate('/master', topic, pub_uris)
File "/usr/lib/python2.7/xmlrpclib.py", line 1243, in __call__
return self.__send(self.__name, args)
File "/usr/lib/python2.7/xmlrpclib.py", line 1602, in __request
verbose=self.__verbose
File "/usr/lib/python2.7/xmlrpclib.py", line 1283, in request
return self.single_request(host, handler, request_body, verbose)
File "/usr/lib/python2.7/xmlrpclib.py", line 1316, in single_request
return self.parse_response(response)
File "/usr/lib/python2.7/xmlrpclib.py", line 1493, in parse_response
return u.close()
File "/usr/lib/python2.7/xmlrpclib.py", line 800, in close
raise Fault(**self._stack[0])
Fault: <Fault -1: 'publisherUpdate: unknown method name'>
[rosmaster.master][INFO] 2018-07-05 14:57:11,994: -PUB [/map_metadata] /gmapping http://husarion-2469:45341/
[rosmaster.master][INFO] 2018-07-05 14:57:11,997: -PUB [/rosout] /laser_broadcaster http://husarion-2469:34879/
[rosmaster.master][INFO] 2018-07-05 14:57:12,001: -SERVICE [/rplidar/set_logger_level] /rplidar rosrpc://husarion-2469:56053
[rosmaster.master][INFO] 2018-07-05 14:57:12,006: -PUB [/rosout] /drive_controller http://husarion-2469:34701/
[rosmaster.master][INFO] 2018-07-05 14:57:12,009: -PUB [/tf] /laser_broadcaster http://husarion-2469:34879/
[rosmaster.master][INFO] 2018-07-05 14:57:12,030: -SUB [/tf] /gmapping http://husarion-2469:45341/
[rosmaster.master][INFO] 2018-07-05 14:57:12,054: -SERVICE [/stop_motor] /rplidar rosrpc://husarion-2469:56053
[rosmaster.master][INFO] 2018-07-05 14:57:12,060: -SERVICE [/laser_broadcaster/get_loggers] /laser_broadcaster rosrpc://husarion-2469:59433
[rosmaster.master][INFO] 2018-07-05 14:57:12,077: publisherUpdate[/rosout] -> http://husarion-2469:44562/ ['http://husarion-2469:34701/', 'http://husarion-2469:46639/', 'http://husarion-2469:38087/']
[rosmaster.master][INFO] 2018-07-05 14:57:12,080: publisherUpdate[/rosout] -> http://husarion-2469:44562/ ['http://husarion-2469:34701/', 'http://husarion-2469:46639/', 'http://husarion-2469:38087/']: sec=0.00, result=[1, '', 0]
[rosmaster.master][INFO] 2018-07-05 14:57:12,081: -SUB [/tf_static] /gmapping http://husarion-2469:45341/
[rosmaster.master][INFO] 2018-07-05 14:57:12,082: publisherUpdate[/rosout] -> http://husarion-2469:44562/ ['http://husarion-2469:46639/', 'http://husarion-2469:38087/']
[rosmaster.master][INFO] 2018-07-05 14:57:12,083: -PUB [/tf] /drive_controller http://husarion-2469:34701/
[rosmaster.master][INFO] 2018-07-05 14:57:12,085: publisherUpdate[/rosout] -> http://husarion-2469:44562/ ['http://husarion-2469:46639/', 'http://husarion-2469:38087/']: sec=0.00, result=[1, '', 0]
[rosmaster.master][INFO] 2018-07-05 14:57:12,086: publisherUpdate[/tf] -> http://husarion-2469:45341/ ['http://husarion-2469:34701/']
[rosmaster.master][INFO] 2018-07-05 14:57:12,087: publisherUpdate[/tf] -> http://husarion-2469:38087/ ['http://husarion-2469:34701/']
[rosmaster.master][INFO] 2018-07-05 14:57:12,088: publisherUpdate[/tf] -> http://husarion-2469:45341/ ['http://husarion-2469:34701/']: sec=0.00, exception=<Fault -1: 'publisherUpdate: unknown method name'>
[rosmaster.master][INFO] 2018-07-05 14:57:12,091: publisherUpdate[/tf] -> http://husarion-2469:38087/ ['http://husarion-2469:34701/']: sec=0.00, result=[1, '', 0]
[rosmaster.master][INFO] 2018-07-05 14:57:12,091: publisherUpdate[/tf] -> http://husarion-2469:38087/ []
[rosmaster.master][INFO] 2018-07-05 14:57:12,093: publisherUpdate[/tf] -> http://husarion-2469:38087/ []: sec=0.00, result=[1, '', 0]
[rosmaster.threadpool][ERROR] 2018-07-05 14:57:12,093: Traceback (most recent call last):
File "/opt/ros/kinetic/lib/python2.7/dist-packages/rosmaster/threadpool.py", line 218, in run
result = cmd(*args)
File "/opt/ros/kinetic/lib/python2.7/dist-packages/rosmaster/master_api.py", line 210, in publisher_update_task
ret = xmlrpcapi(api).publisherUpdate('/master', topic, pub_uris)
File "/usr/lib/python2.7/xmlrpclib.py", line 1243, in __call__
return self.__send(self.__name, args)
File "/usr/lib/python2.7/xmlrpclib.py", line 1602, in __request
verbose=self.__verbose
File "/usr/lib/python2.7/xmlrpclib.py", line 1283, in request
return self.single_request(host, handler, request_body, verbose)
File "/usr/lib/python2.7/xmlrpclib.py", line 1316, in single_request
return self.parse_response(response)
File "/usr/lib/python2.7/xmlrpclib.py", line 1493, in parse_response
return u.close()
File "/usr/lib/python2.7/xmlrpclib.py", line 800, in close
raise Fault(**self._stack[0])
Fault: <Fault -1: 'publisherUpdate: unknown method name'>
[rosmaster.master][INFO] 2018-07-05 14:57:12,095: -SERVICE [/start_motor] /rplidar rosrpc://husarion-2469:56053
[rosmaster.master][INFO] 2018-07-05 14:57:12,109: -SERVICE [/laser_broadcaster/set_logger_level] /laser_broadcaster rosrpc://husarion-2469:59433
[rosmaster.master][INFO] 2018-07-05 14:57:12,129: -SUB [/scan] /gmapping http://husarion-2469:45341/
[rosmaster.master][INFO] 2018-07-05 14:57:12,135: -SUB [/pose] /drive_controller http://husarion-2469:34701/
[rosmaster.master][INFO] 2018-07-05 14:57:12,139: -SERVICE [/gmapping/get_loggers] /gmapping rosrpc://husarion-2469:48536
[rosmaster.master][INFO] 2018-07-05 14:57:12,153: -SERVICE [/drive_controller/get_loggers] /drive_controller rosrpc://husarion-2469:47379
[rosmaster.master][INFO] 2018-07-05 14:57:12,155: -SERVICE [/gmapping/set_logger_level] /gmapping rosrpc://husarion-2469:48536
[rosmaster.master][INFO] 2018-07-05 14:57:12,160: -SERVICE [/drive_controller/set_logger_level] /drive_controller rosrpc://husarion-2469:47379
[rosmaster.master][INFO] 2018-07-05 14:57:12,164: -SERVICE [/dynamic_map] /gmapping rosrpc://husarion-2469:48536
[rosmaster.master][INFO] 2018-07-05 14:57:12,899: -PUB [/rosout_agg] /rosout http://husarion-2469:44562/
[rosmaster.master][INFO] 2018-07-05 14:57:12,910: -SUB [/rosout] /rosout http://husarion-2469:44562/
[rosmaster.master][INFO] 2018-07-05 14:57:12,929: -SERVICE [/rosout/get_loggers] /rosout rosrpc://husarion-2469:60484
[rosmaster.master][INFO] 2018-07-05 14:57:12,936: -SERVICE [/rosout/set_logger_level] /rosout rosrpc://husarion-2469:60484
[rosmaster.main][INFO] 2018-07-05 14:57:13,108: keyboard interrupt, will exit
[rosmaster.main][INFO] 2018-07-05 14:57:13,109: stopping master...
[rospy.core][INFO] 2018-07-05 14:57:13,110: signal_shutdown [atexit]
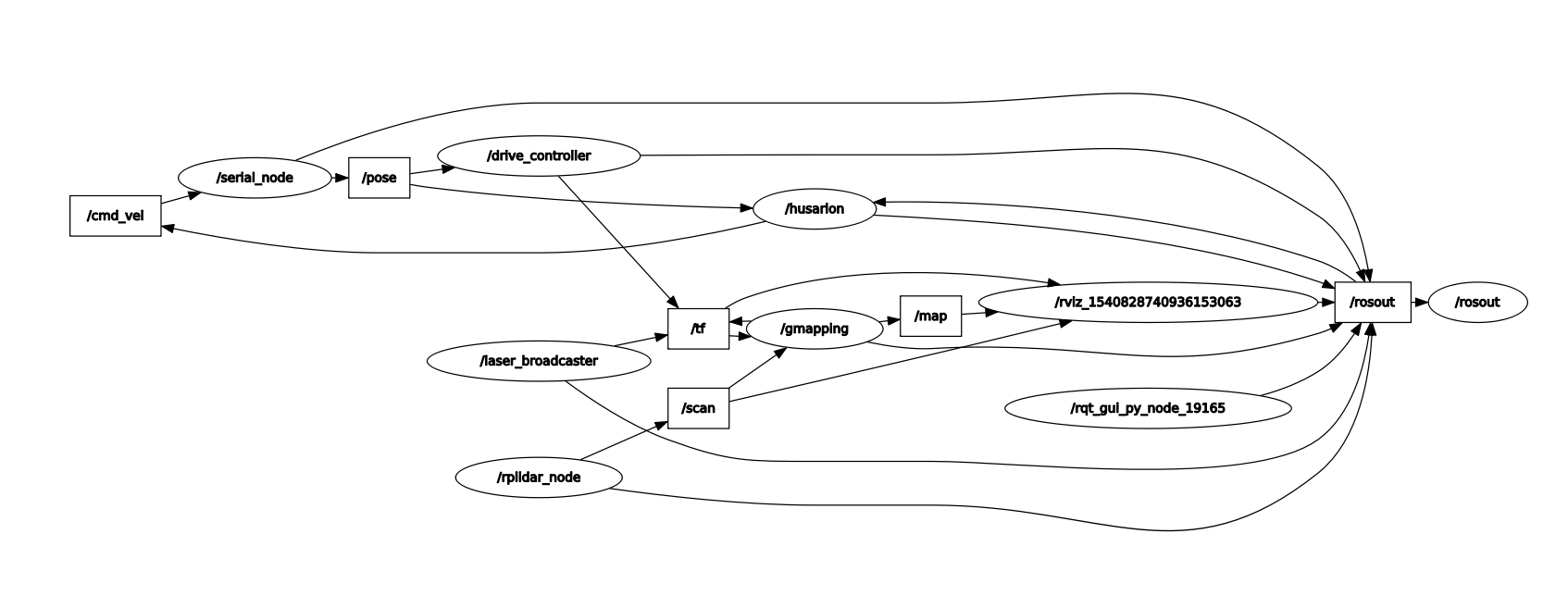
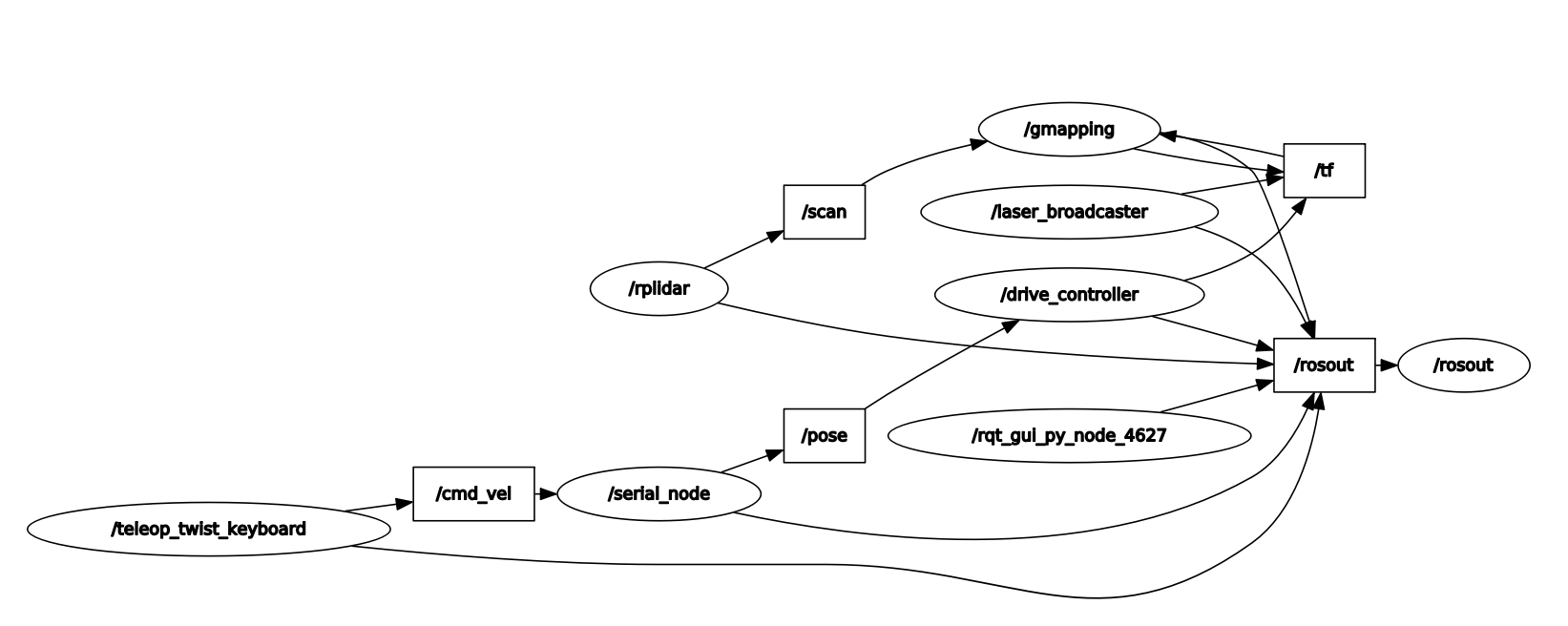
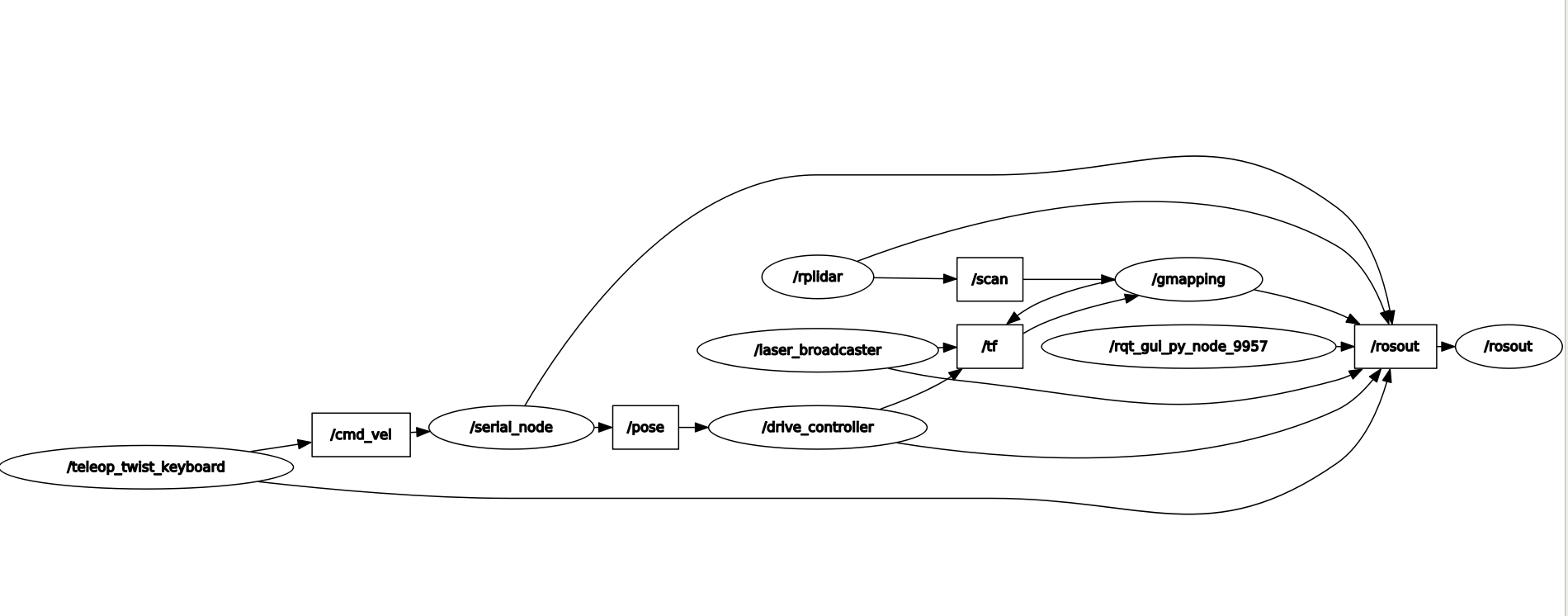
Rqt graphs:
Log files are way to long to post in one post…