Hi
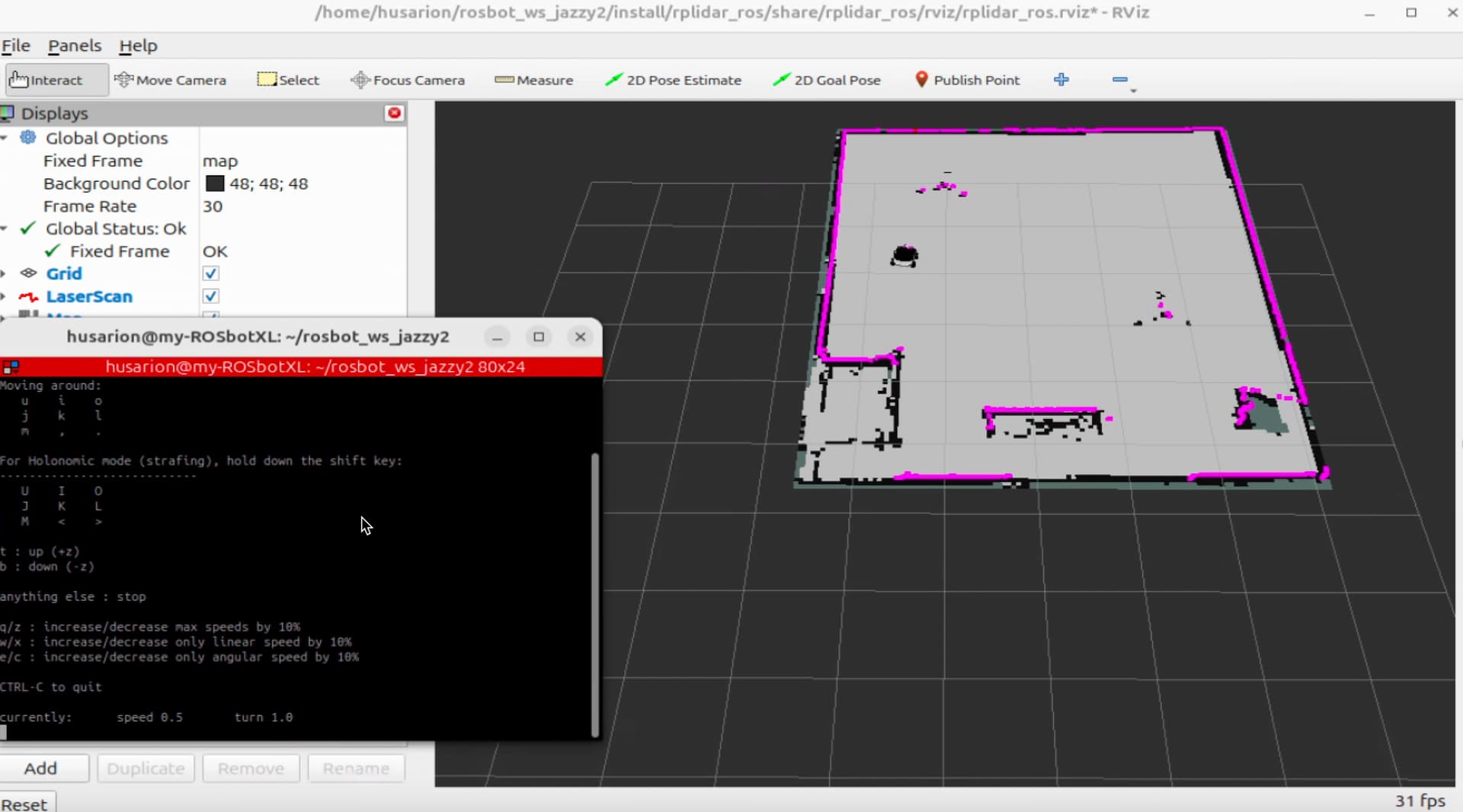
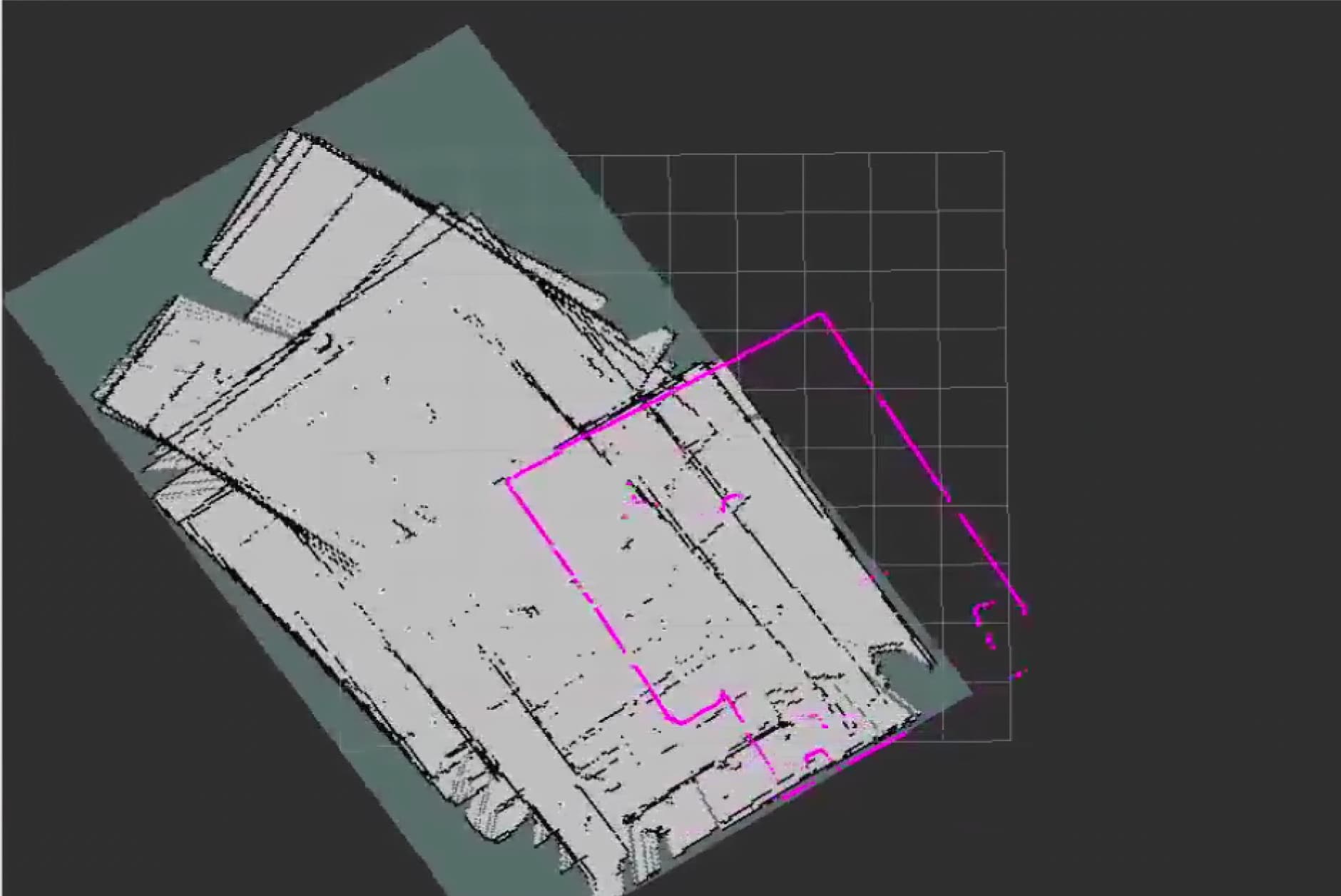
I am using slam_toolbox and got it running with ROSbot XL. Now I’m getting the following map. It’s messy. The room is a rectangular one. The map looks like having copies of the room. Can you point me why this is the case although I haven’t investigated further yet.
Here’s my config:
slam_toolbox:
ros__parameters:
# Plugin params
solver_plugin: solver_plugins::CeresSolver
ceres_linear_solver: SPARSE_NORMAL_CHOLESKY
ceres_preconditioner: SCHUR_JACOBI
ceres_trust_strategy: LEVENBERG_MARQUARDT
ceres_dogleg_type: TRADITIONAL_DOGLEG
ceres_loss_function: None
# ROS Parameters
odom_frame: odom
map_frame: map
base_frame: base_link
scan_topic: /scan_filtered
use_map_saver: true
mode: mapping #localization
# if you'd like to immediately start continuing a map at a given pose
# or at the dock, but they are mutually exclusive, if pose is given
# will use pose
#map_file_name: test_steve
# map_start_pose: [0.0, 0.0, 0.0]
#map_start_at_dock: true
debug_logging: false
throttle_scans: 1
transform_publish_period: 0.02 #if 0 never publishes odometry
map_update_interval: 2.0 #5.0
resolution: 0.04 #0.05
max_laser_range: 12.0 #20.0 #for rastering images
minimum_time_interval: 0.1 #0.5
transform_timeout: 0.2
tf_buffer_duration: 20.0 #30.0
stack_size_to_use: 40000000 #// program needs a larger stack size to serialize large maps
enable_interactive_mode: false #true
# General Parameters
use_scan_matching: true
use_scan_barycenter: true
minimum_travel_distance: 0.3 #0.5
minimum_travel_heading: 0.5
scan_buffer_size: 10
scan_buffer_maximum_scan_distance: 7.0 #10.0
link_match_minimum_response_fine: 0.1
link_scan_maximum_distance: 1.0 #1.5
loop_search_maximum_distance: 3.0
do_loop_closing: true
loop_match_minimum_chain_size: 10
loop_match_maximum_variance_coarse: 3.0
loop_match_minimum_response_coarse: 0.35
loop_match_minimum_response_fine: 0.45
# Correlation Parameters - Correlation Parameters
correlation_search_space_dimension: 0.5
correlation_search_space_resolution: 0.01
correlation_search_space_smear_deviation: 0.1
# Correlation Parameters - Loop Closure Parameters
loop_search_space_dimension: 8.0
loop_search_space_resolution: 0.05