Hello.
I am trying to attach 2 additional GPS sensors and 1 additional IMU sensor to the Rosbot 2.0.
First of all, one additional GPS is installed.
Added library for using GPS.
MPU9250 : MPU9250_Interface - interface imu mpu9250 | Mbed
NEO-6M GPS : GPS - read gps data | Mbed
After that, I modified the code to be able to publish the GPS data.
https://github.com/YoungWoo-An/rosbot2.0firmware/blob/main/src/main.cpp#:~:text=if%20(true)%20//%20gps1,}
As a result, we were able to receive GPS data.
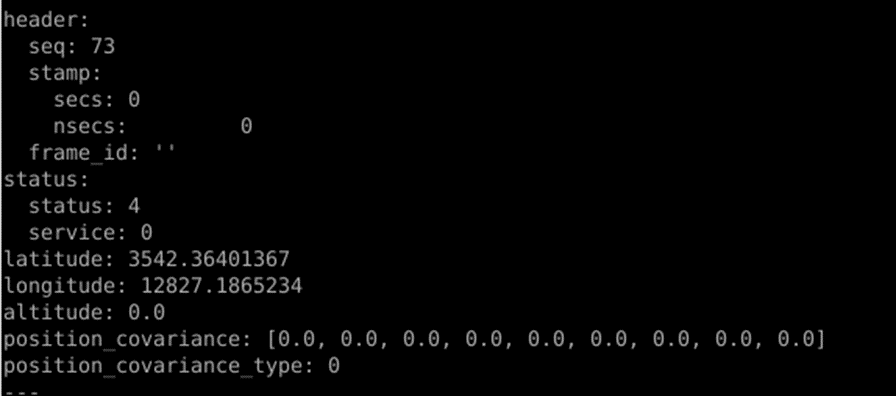
However, after a few seconds, an error like the picture below appeared and GPS data could not be obtained anymore.
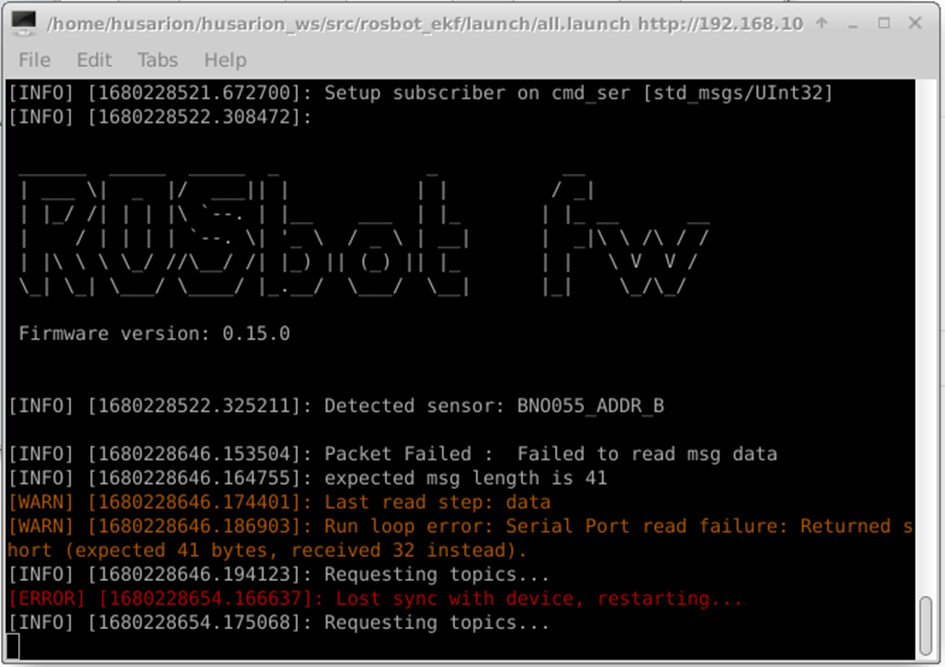
I think the connection between SBC and Core2 is disconnected.
How can I solve this problem?
Thank you.