Hi everyone,
I have a ROSbot2.0.
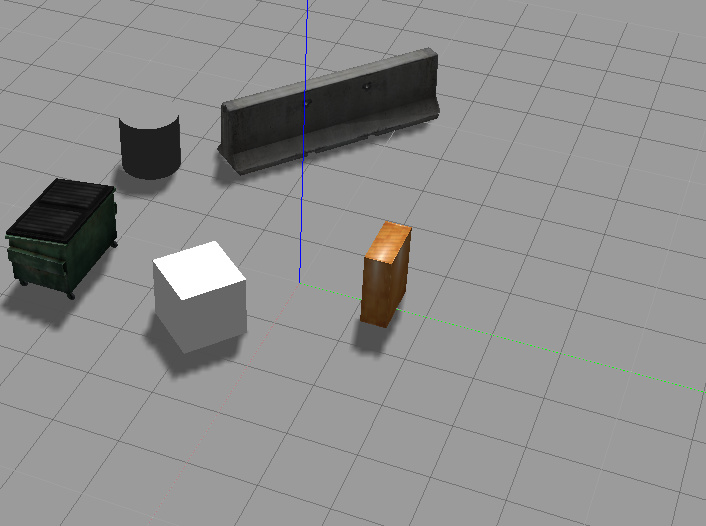
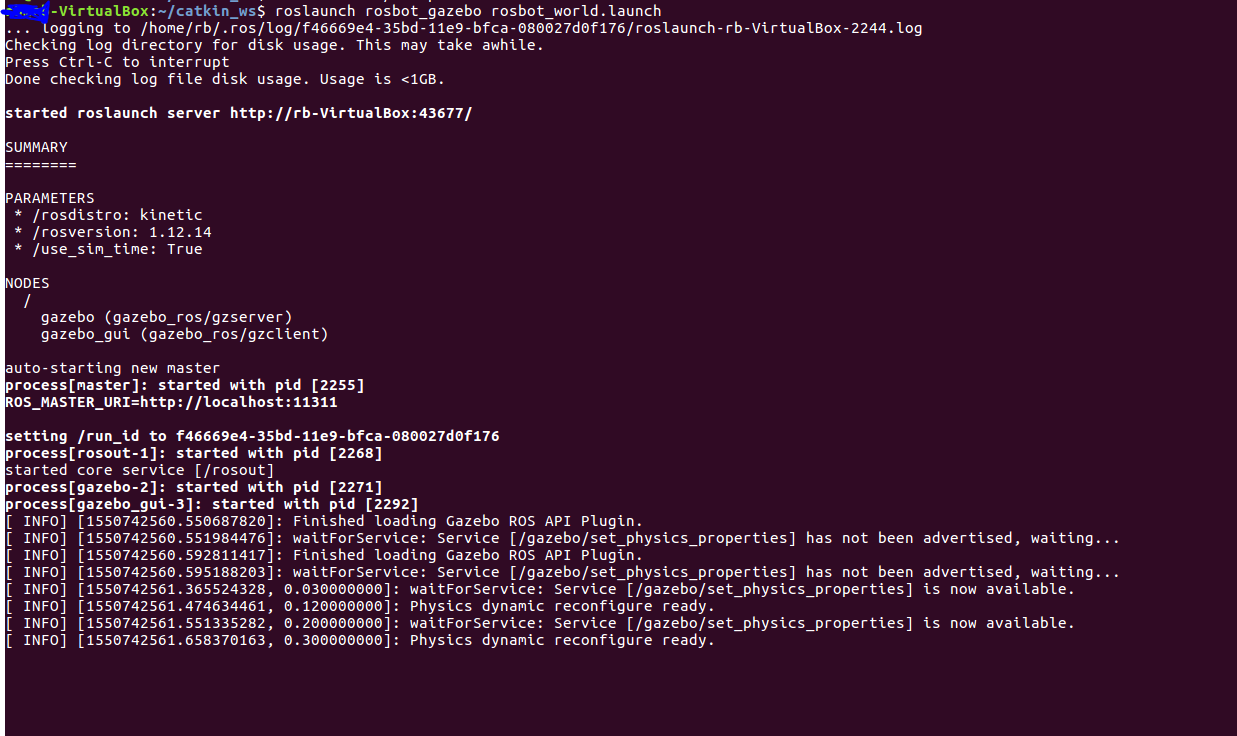
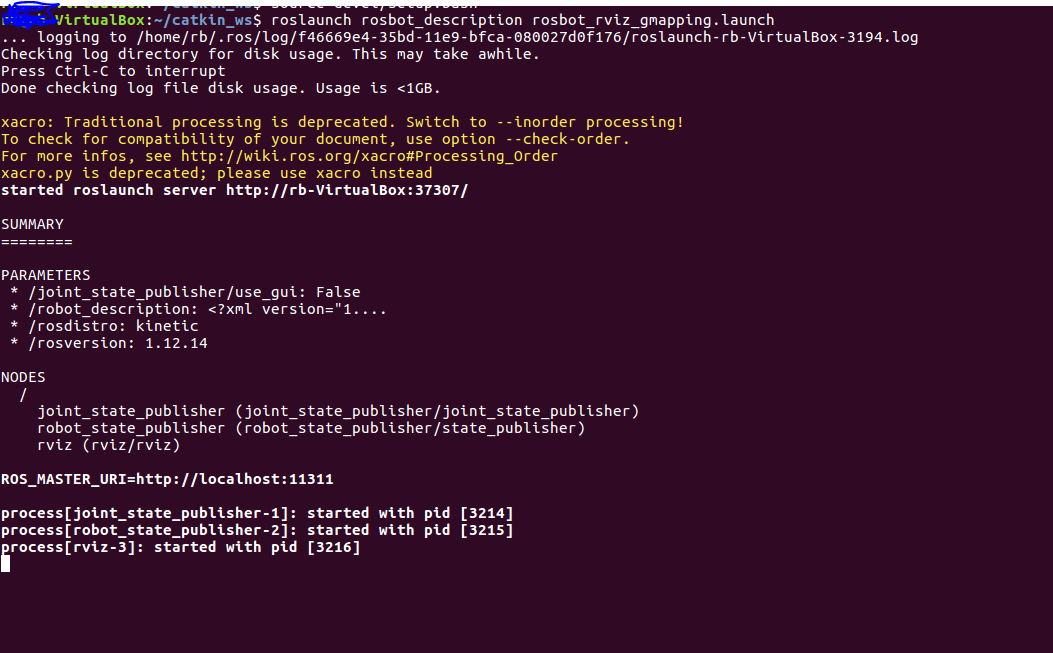
I am trying a few days to install the simulation for ROSbot2.0. I follow all instructions and errors that i’ve found on this forum and github like installing rosbot_description and tutorial_pkg and also do after ROS install DEP for all new dependencies package. The problem is, i still get an error in Rviz (by robot model “No transform from [base_link] to [odom]”) and no Robot is visible in Gazebo(the environment is visible. I found out that there is really no clear manuel how to install that RosbotSimulation model from a clean full ROS install (i have kinetic). The robot is expensive and that manuel must be there in that way. So if someone would take time to subscribe how to install that RosbotSimulation model from a clean full install kinetic, i would be very happy and thankfull!
Some will advise to use the Virtuel Box image that i can download from Husarion. But that is no option for me because i have to work with kinetic for some other reasons.
Maby that github can be upgraded with a clear manuel. The manuel on github definitely is not good.
Thanks a lot!