Hi All,
I am using Visual Studio code(VSC) offline development tool to flash ROS core 2.0 instead of the Husarion Cloud due to registration issues.
I followed the VSC installation guide as detailed in this tutorial.
The process I follows to flash ros core 2.0 is as follows
sudo systemctl disable husarnet-configurator
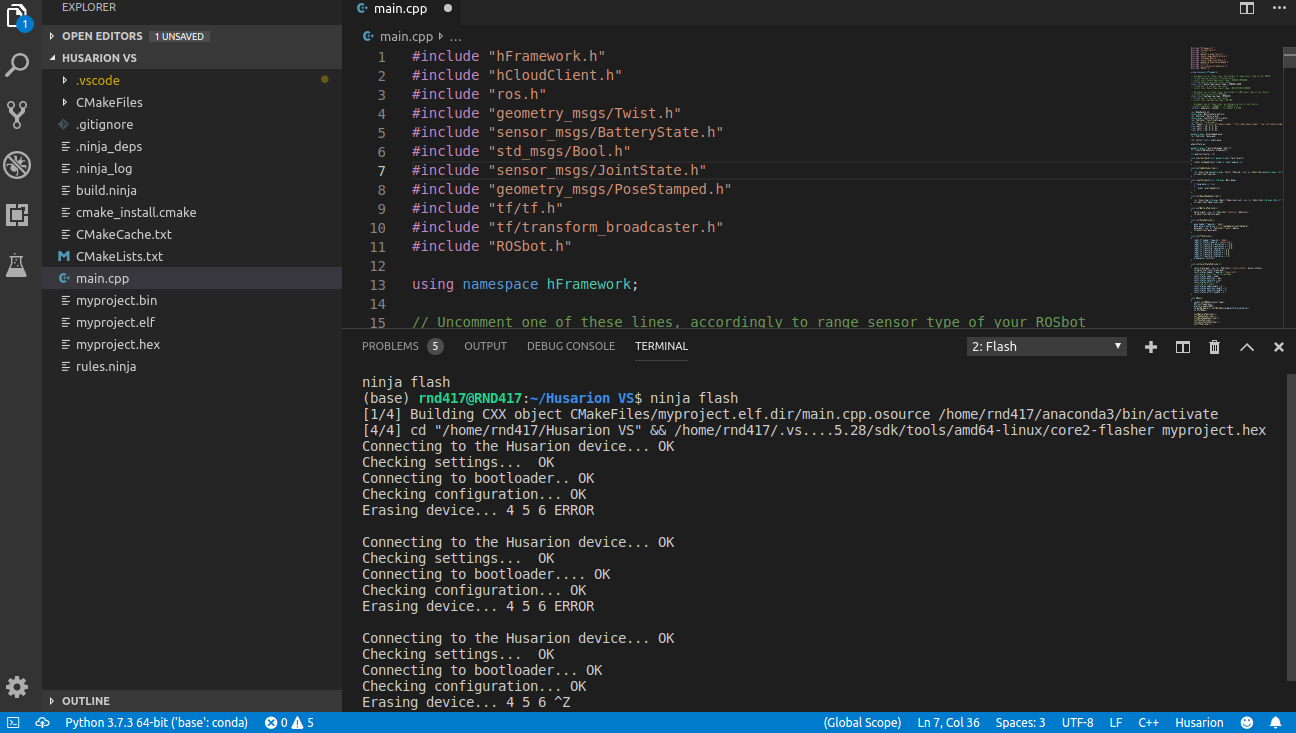
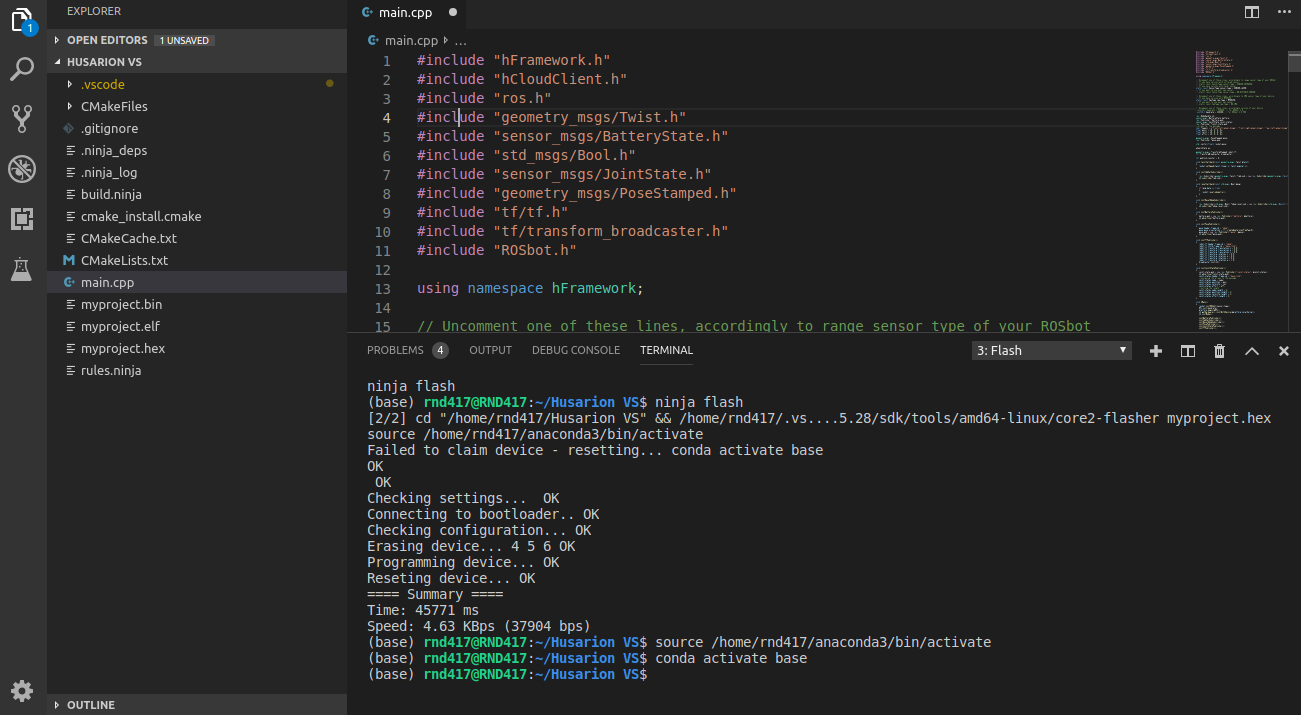
Then I open my VSC and flash my program using the required command
ninja flash
I do it by pressing ctrl+shift+p, then selecting Flash to Core option
then enable husarion cloud so the device can synchronize using
sudo systemctl enable husarnet-configurator
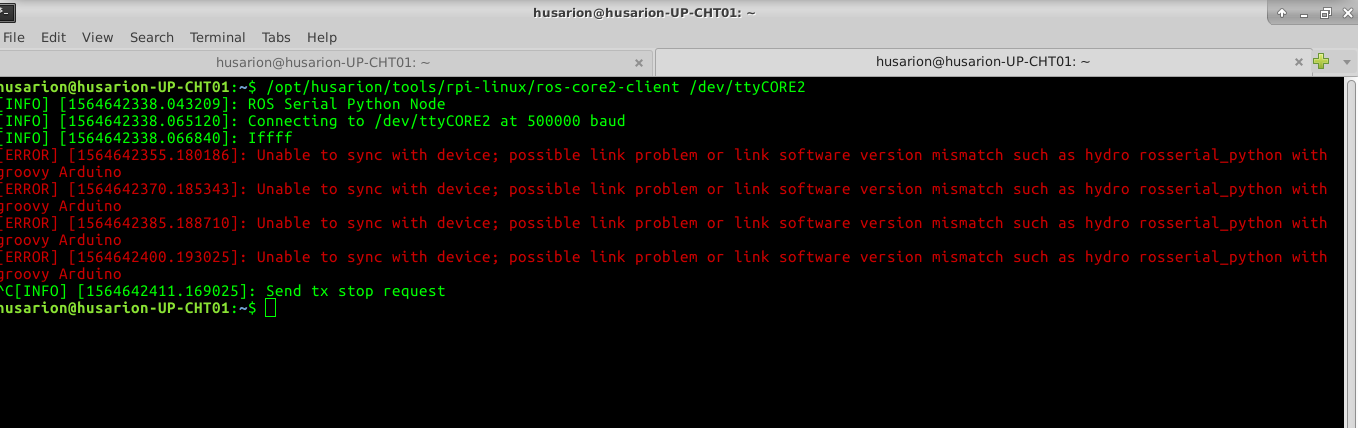
But even after successfully flashing the program twice, I get the following error
How to resolve this issue ?
Hello Pradeep_BV,
It is not necessary to disable and enable husarnet-configurator with each flashing, it should be enabled all the time. That procedure is necessary only when unlocking bootlaoder.
To solve the issue, we need to check few things:
Are you flashing CORE2 with firmware for ROSbot 2.0 or ROSbot 2.0 PRO?
What is the state of LEDs on ROSbot rear panel after pushing reset button.
What is the output of serial console in VSC (push CTRL + SHIFT + P then choose Open CORE2 serial console )? Does the output change after pushing reset button?
Regards,
Hi Lukasz,
I am Flashing ROSbot PRO 2.0
If i am not disabling husranet-configurator , I am unable to flash the rosbot.
If I am disabling and enabling husranet-configurator I am able to flash the program.
The led’s Power and L1 are blinking during flashing process.
The output of serial console on presiing reset button is as follows
Please tell me what do next
byq77
August 1, 2019, 12:18pm
4
Hi,bootloader as described herestm32loader (community topic ):
1. Stop services:
$ sudo systemctl disable husarnet-configurator
$ sudo systemctl stop husarnet-configurator
$ sudo systemctl disable husarion-shield
$ sudo reboot
2. On rosbot run:
$ sudo stm32loader -c upboard -r -l 65636 memory_content
$ arm-none-eabi-objcopy -I binary -O ihex memory_content memory_content.hex
Send me memory_content.hex file back.
3. Restart husarnet-configurator
$ sudo systemctl enable husarnet-configurator
$ sudo systemctl restart husarnet-configurator
Hi BYQ77,
I followed instructions but i get the following error
First I updated the firmware of the boot loader in the VSC using
./core2-flasher --unprotect
./core2-flasher bootloader_1_0_0_core2.hex
./core2-flasher --protect
Then I tested gpio program using
sudo systemctl disable husarnet-configurator
sudo systemctl stop husarnet-configurator
sudo systemctl disable husarion-shield
sudo reboot
cd ~/ && git clone https://github.com/vsergeev/python-periphery.git
cd ~/python-periphery && sudo python setup.py install --record files.txt
The program to test gpio pins was working.
cd ~/ && git clone GitHub - byq77/stm32loader: Flash firmware to STM32 microcontrollers using Python.
After this the I tried following commands which started generating the error
sudo stm32loader -c upboard -u -W
sudo stm32loader -c upboard -e -w -v firmware.bin
sudo stm32loader -c upboard -r -l 65636 memory_content
Please suggest how to resolve this issue
Hi All,
Husarion Team contacted me personally and we were able to debug the problem.
Thank you for the support.