Hi,
I’m facing a strange issue on my Rosbot 2.0 (Asus Tinker board with latest ubuntu image, ros-2019-02-17) :
Leds state :
LR1 → constant ON
LR2 → constant ON
POWER LED → ON
For the other leds (LED1 to 3), they first blink in a strange way but then turn off.
Ubuntu boots normally, I can access to the desktop it with HDMI and RDP and ROS works as well.
Issues :
-
hConfig : I can connect to the rosbot with the HusarionConfigXXX WiFi but it’s not possible to setup the parameters (new Wifi config or connection to the cloud). It told me there is an error and the LR1 and 2 leds don’t blink, they are constant on. Therefore, I can’t add the Rosbot to the cloud.
I followed the two other connection options (browser and directly on the Rosbot with Ubuntu) too but with no success.- with the browser way, it can connect to the rosbot WiFi but then it fails to add the rosbot on the cloud or husarnet.
- On Ubuntu, when I execute the command
sudo systemctl restart husarnet-configurator, the led LR2 turns off and directly turns on after. And no device has been added the cloud.
-
the command
/opt/husarion/tools/rpi-linux/ros-core2-client /dev/ttyCORE2fails (same problem as : https://community-mirror.husarion.com/t/trouble-bridging-core2-to-ros/452/3). -
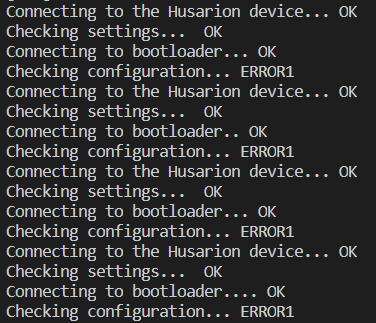
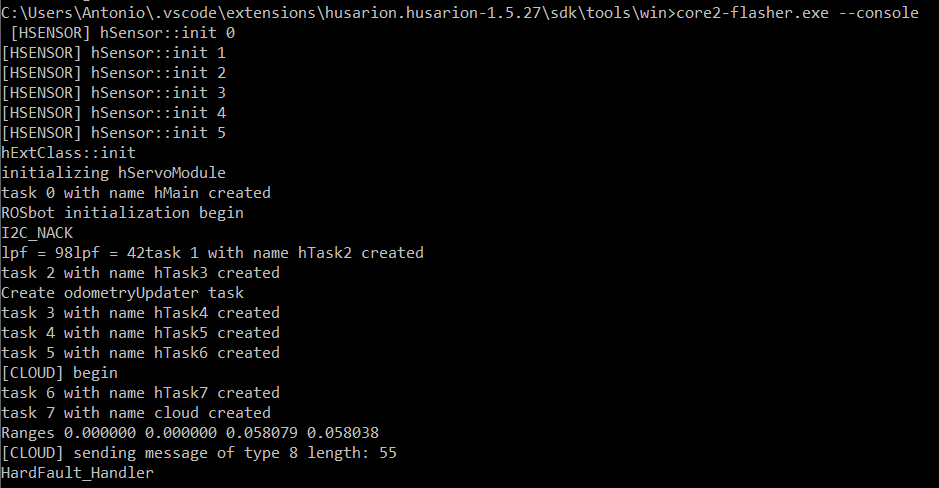
The microcontroller fell into hard fault state with the special leds pattern but it is impossible for me to flash a new program because I don’t have access to it with the cloud. So I tried with VSC but it doesn’t work, I get this error:
Before the problem, I updated the firmware with the default one for ROSbot 2.0 on the cloud. I wanted to change the proximity sensors from VL53L0X to GP2Y0A41SK0F.
Thank you in advance for your support.
Best regards,
Antonio