We bought Rosbot 2.0 R a month ago.
We shutdown the rosbot in terminal, we turn it on a day after and the HDMI display shows nothing.
I checked few threads and tutorials, but could not solve the issue.
We tried,
full charge battery,
remove battery and use power connector
Can you verify why the monitor screen is not showing?
First of all, I have to ask if your display works properly with other devices?
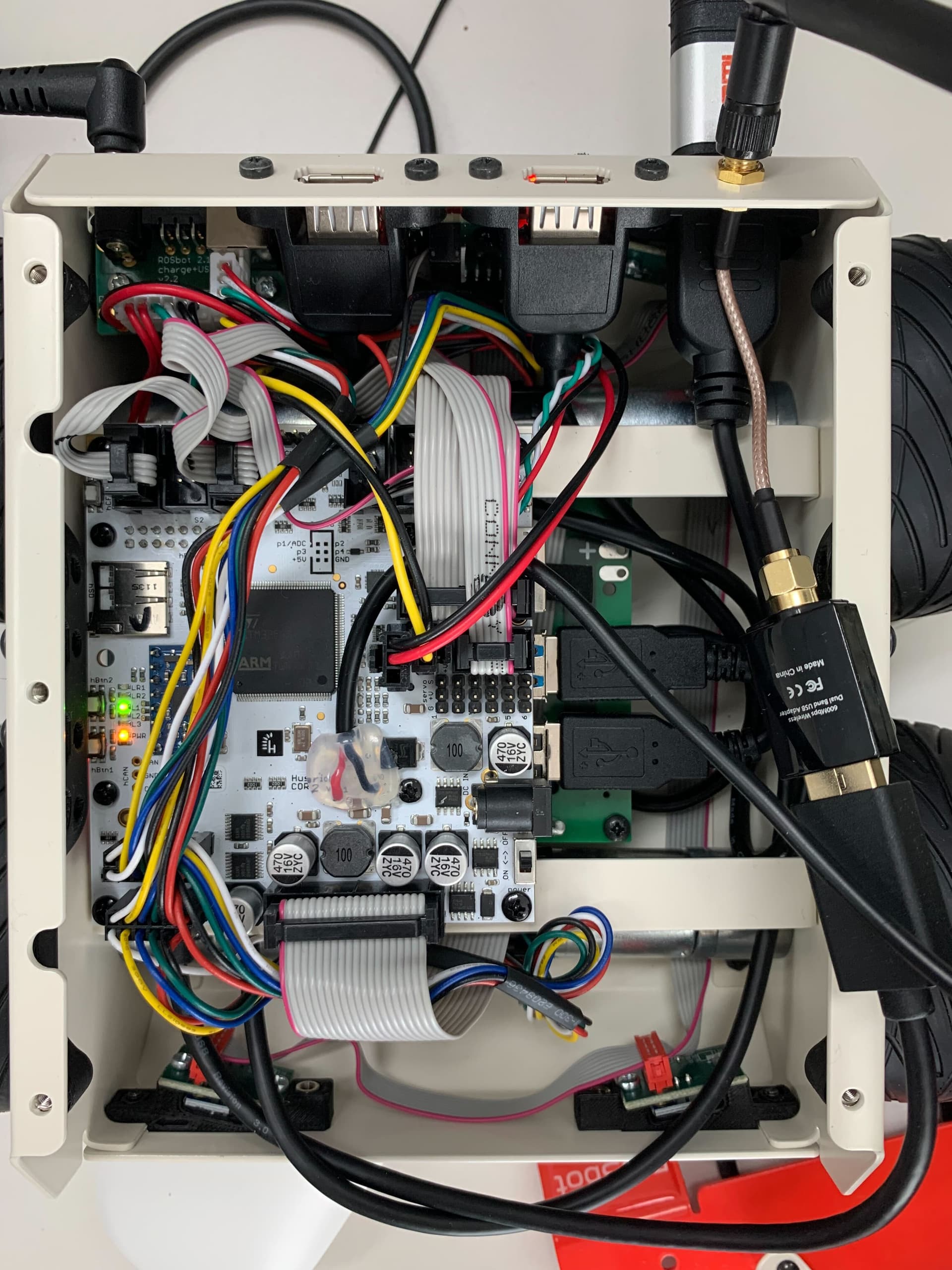
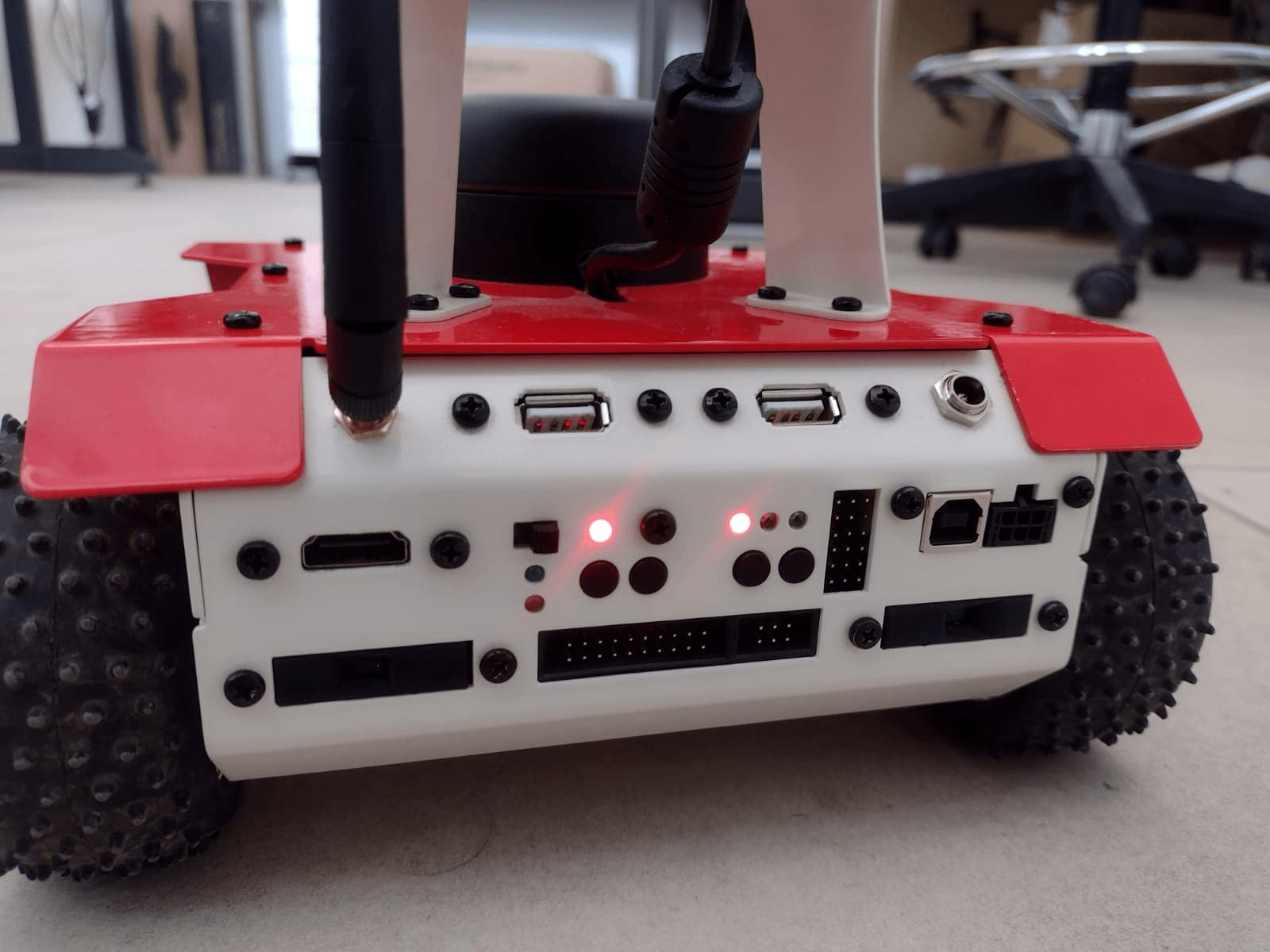
I see only one red LED on. L1 second red diode (next to 2 green LEDs) should be turned on if ROSbot’s firmware works properly.
For the first step, I suggest to keep pressed the reset button while ROSbot is booting. Let me know about the results.
Thank you.
I will send you next steps, but first please unmount the top cover with LiDAR and camera of your ROSbot 2.0 R (6 black screws) and upload here the photo of USB cables inserted into Raspberry Pi4 (under Core 2 controller).
When we flashed example.hex into Core2, and the LED worked well.
So, we guess the firmware has a problem.
Could you give me the correct reinstall path for the software?
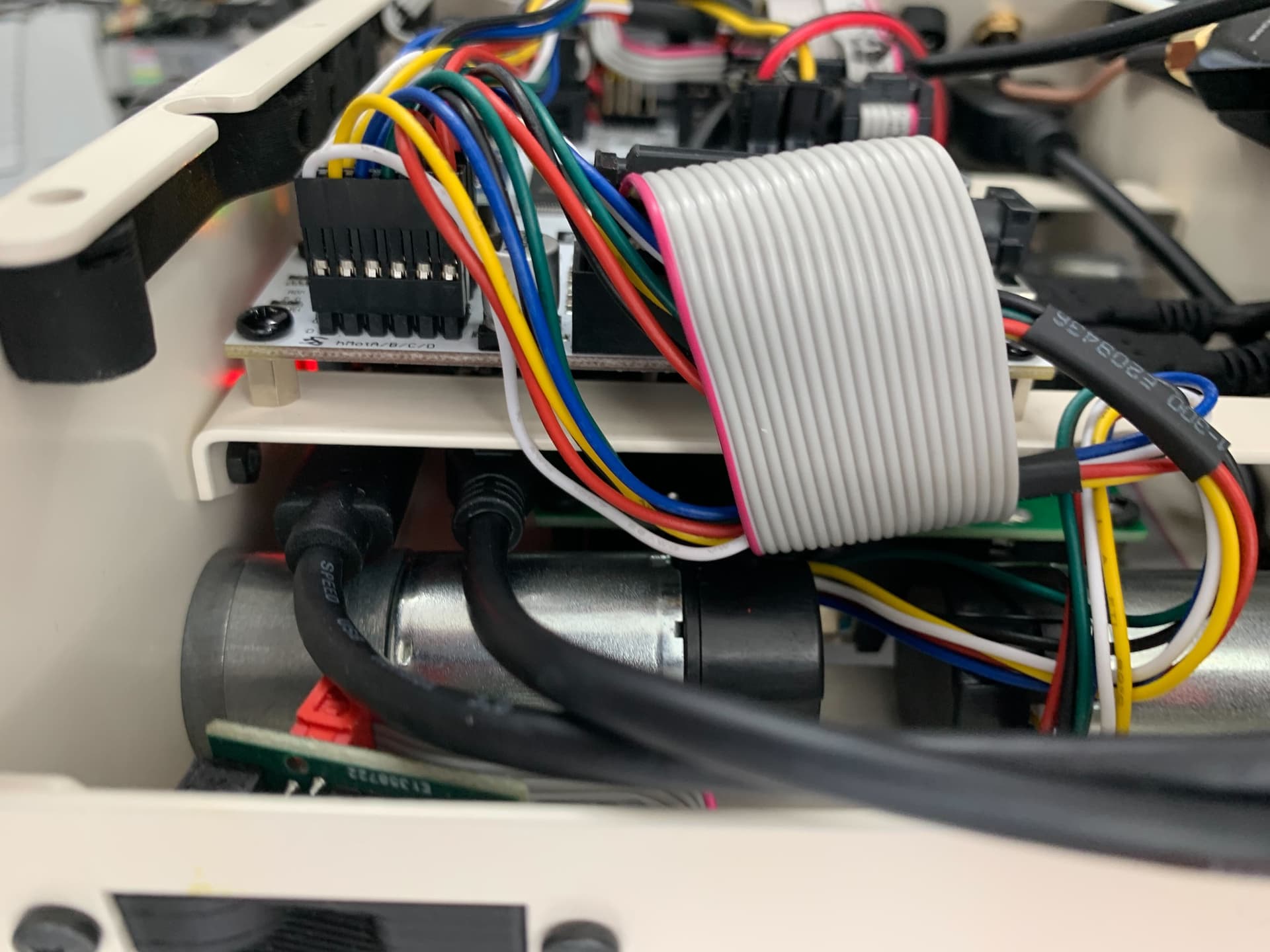
Thank you for the photos. I will need one more photo of the USB-microUSB cable which connects Raspberry Pi4 with converter UART (small device which is connected directly to the LiDAR).
Hello, I had the same fault and what I did was to try disconnecting everything and connecting one by one, my fault was a proximity sensor in hsens2, after disconnecting it my robot gives image .
Yes, exactly this one.
Now turn off ROSbot, unplug this microUSB cable from SLAMTEC UART converter, plug in HDMI device and turn the ROSbot 2R on. Robot should boot and in ~3 minutes you should see normal home screen.
If the robot starts booting you can plug back microUSB. It may cause your problem just in the moment of turning on.
Let me know if that step is completed.
Ariel, What kind of proximity sensor are you using? You connect it to hSens2 so I guess it is external. What is its power consumption?
Try disconnecting “faulty” sensor, turning the ROSbot ON and connecting it back during the boot. Does it work properly?