I have a Rosbot 2.0 with Ubuntu 20.04 + ROS Noetic + Docker + Husarnet client installed on it. Everything was working fine until just a few minutes ago after I test drove the bot. The power switch stopped turning the bot off. Whenever the bot has batteries installed, it will remain on no matter what position the ON OFF switch is in. Something probably came loose while driving it but I am not sure where to start with this and I haven’t been able to find resources for this issue elsewhere.
Hi evanaholevas.
Sorry for a late response. It is an unusual case even for us. It seems like either the switch is worn out, and it simply stopped working or a transistor used for delivering power to the whole robot, controlled by that switch, is shortened.
If you feel confident enough testing the connections to find where the problem comes from, please let me know, and we will prepare instructions for you on how to test it.
Best regards,
Krzysztof Wojciechowski.
1 Like
Thank you for getting back to me!
That would be great if you could provide instructions for testing. I would really appreciate it.
Thank you again, I appreciate the help.
Here are steps you need to follow in order to make required measurements. All you need is multimeter with ohmmeter, voltmeter and preferably with diode test function.
- Remove the batteries.
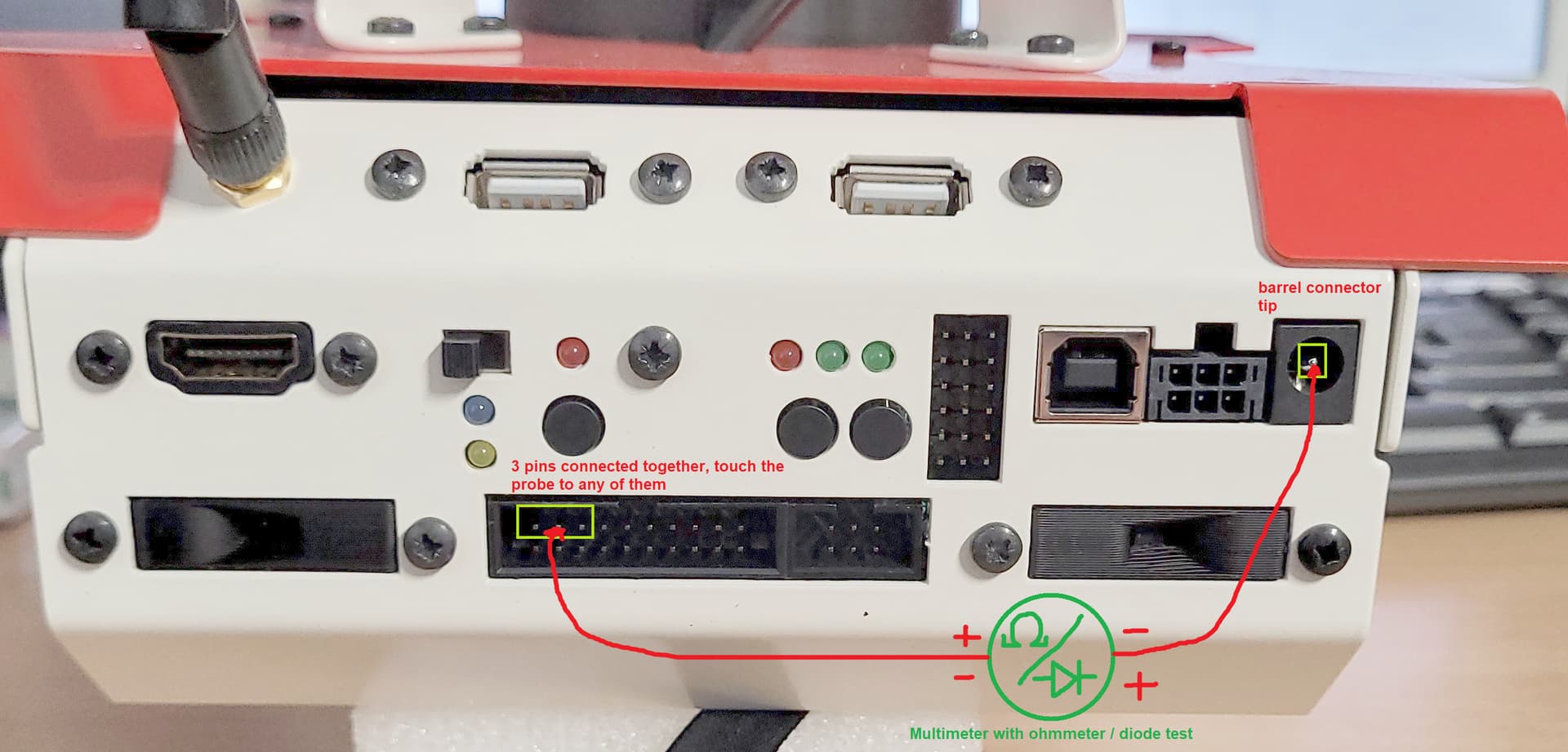
- Set the multimeter to ohmmeter, 200 ohms range. Touch the positive probe to one of the three pins on the left, the negative to the barrel connector tip. Write down the result.
- Set the multimeter to ohmmeter, 200 ohms range. Touch the negative probe to one of the three pins on the left, the positive to the barrel connector tip. Write down the result.
- Set the multimeter to diode test, 200 ohms range. Touch the positive probe to one of the three pins on the left, the negative to the barrel connector tip. Write down the result.
- Set the multimeter to diode test, 200 ohms range. Touch the negative probe to one of the three pins on the left, the positive to the barrel connector tip. Write down the result.
- Insert the batteries. Robot will turn on.
- Set the multimeter to 2V range (or 4V, or 6V). Touch the negative probe to one of the three pins on the left, the positive to the barrel connector tip. Write down the result.
You don’t need to disassemble the robot. Finally, you should end up with 5 measurements.
The image below shows where you should make measurements:
Best regards,
Krzysztof Wojciechowski.
Continuation in this thread: