Hello.
I have installed in my ROSbot 2.0 Pro the ROS2 Foxy version and I have been having a few problems since then.
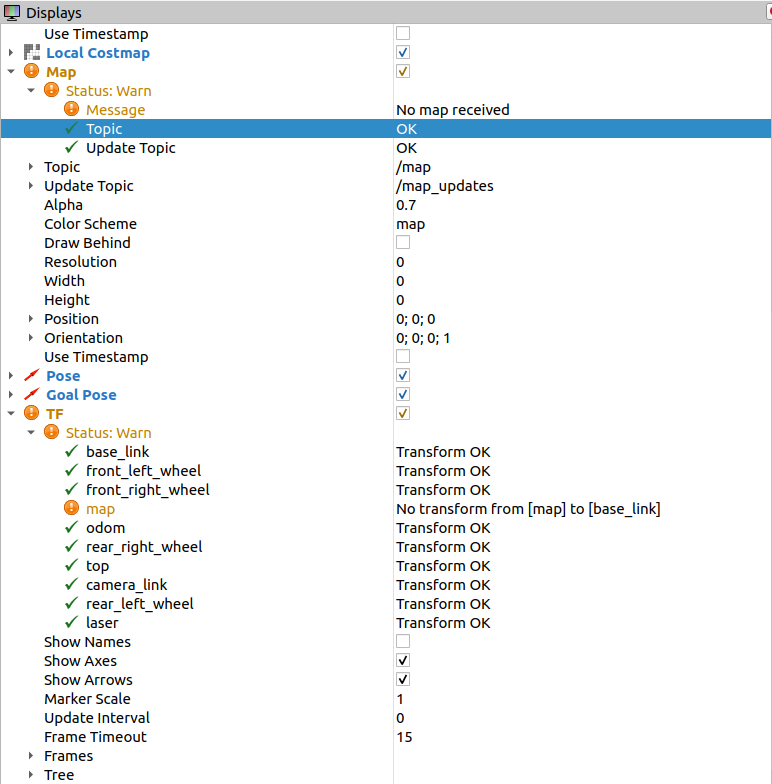
When I launch the navigation_demo_pro.launch.py launch file, I don’t receive information from two of the maps topics, I can only sometimes receive information from the local_costmap. Trying to visualize them in Rviz2, a warning appears, apparently some transformations are missing (base_link->map).
I append you the log I get when I execute the launch file.
[INFO] [launch]: All log files can be found below /home/husarion/.ros/log/2022-11-22-06-40-09-312987-ubuntu-17837
[INFO] [launch]: Default logging verbosity is set to INFO
[INFO] [rplidar_composition-1]: process started with pid [17887]
[INFO] [static_transform_publisher-2]: process started with pid [17889]
[INFO] [rosserial_node.py-3]: process started with pid [17891]
[INFO] [rosbot_tf-4]: process started with pid [17893]
[INFO] [static_transform_publisher-5]: process started with pid [17904]
[INFO] [static_transform_publisher-6]: process started with pid [17915]
[INFO] [static_transform_publisher-7]: process started with pid [17919]
[INFO] [static_transform_publisher-8]: process started with pid [17922]
[INFO] [static_transform_publisher-9]: process started with pid [17924]
[INFO] [static_transform_publisher-10]: process started with pid [17927]
[INFO] [controller_server-11]: process started with pid [17937]
[INFO] [planner_server-12]: process started with pid [17939]
[INFO] [recoveries_server-13]: process started with pid [17947]
[INFO] [bt_navigator-14]: process started with pid [17954]
[INFO] [waypoint_follower-15]: process started with pid [17963]
[INFO] [lifecycle_manager-16]: process started with pid [17967]
[INFO] [sync_slam_toolbox_node-17]: process started with pid [17972]
[rplidar_composition-1] 1669128013.774557 [14] rplidar_co: using network interface enx806d9716512d (udp/10.45.1.56) selected arbitrarily from: enx806d9716512d, docker0
[rplidar_composition-1] [INFO] [1669128013.913680800] [rplidar_composition]: RPLIDAR running on ROS 2 package rplidar_ros. SDK Version: '1.12.0'
[rplidar_composition-1] [INFO] [1669128014.433962500] [rplidar_composition]: RPLIDAR S/N: EAEEEE8BC8E792D8B1E39BF363384C61
[rplidar_composition-1] [INFO] [1669128014.434279389] [rplidar_composition]: Firmware Ver: 1.27
[rplidar_composition-1] [INFO] [1669128014.434487911] [rplidar_composition]: Hardware Rev: 6
[rplidar_composition-1] [INFO] [1669128014.436058718] [rplidar_composition]: RPLidar health status : '0'
[static_transform_publisher-2] 1669128013.796575 [14] static_tra: using network interface enx806d9716512d (udp/10.45.1.56) selected arbitrarily from: enx806d9716512d, docker0
[static_transform_publisher-2] [INFO] [1669128013.978717635] [static_transform_publisher_OJEyhITv7qz6QABk]: Spinning until killed publishing transform from 'base_link' to 'laser'
[rosbot_tf-4] 1669128014.071221 [14] rosbot_tf: using network interface enx806d9716512d (udp/10.45.1.56) selected arbitrarily from: enx806d9716512d, docker0
[static_transform_publisher-5] 1669128014.135332 [14] static_tra: using network interface enx806d9716512d (udp/10.45.1.56) selected arbitrarily from: enx806d9716512d, docker0
[static_transform_publisher-6] 1669128014.004053 [14] static_tra: using network interface enx806d9716512d (udp/10.45.1.56) selected arbitrarily from: enx806d9716512d, docker0
[static_transform_publisher-6] [INFO] [1669128014.531692156] [static_transform_publisher_SVyWRpssY9dNwzXO]: Spinning until killed publishing transform from 'base_link' to 'front_right_wheel'
[static_transform_publisher-7] 1669128014.333453 [14] static_tra: using network interface enx806d9716512d (udp/10.45.1.56) selected arbitrarily from: enx806d9716512d, docker0
[static_transform_publisher-8] 1669128014.662756 [14] static_tra: using network interface enx806d9716512d (udp/10.45.1.56) selected arbitrarily from: enx806d9716512d, docker0
[static_transform_publisher-9] 1669128014.496030 [14] static_tra: using network interface enx806d9716512d (udp/10.45.1.56) selected arbitrarily from: enx806d9716512d, docker0
[static_transform_publisher-5] [INFO] [1669128014.782657848] [static_transform_publisher_QFcbzYo9tPWeJL0R]: Spinning until killed publishing transform from 'base_link' to 'front_left_wheel'
[static_transform_publisher-10] 1669128014.878916 [14] static_tra: using network interface enx806d9716512d (udp/10.45.1.56) selected arbitrarily from: enx806d9716512d, docker0
[static_transform_publisher-7] [INFO] [1669128014.982591712] [static_transform_publisher_wkkVw1FBtWJug2oh]: Spinning until killed publishing transform from 'base_link' to 'rear_left_wheel'
[waypoint_follower-15] 1669128015.045963 [14] waypoint_f: using network interface enx806d9716512d (udp/10.45.1.56) selected arbitrarily from: enx806d9716512d, docker0
[lifecycle_manager-16] 1669128015.167131 [14] lifecycle_: using network interface enx806d9716512d (udp/10.45.1.56) selected arbitrarily from: enx806d9716512d, docker0
[planner_server-12] 1669128015.167158 [14] planner_se: using network interface enx806d9716512d (udp/10.45.1.56) selected arbitrarily from: enx806d9716512d, docker0
[rplidar_composition-1] [INFO] [1669128015.171847793] [rplidar_composition]: current scan mode: Sensitivity, max_distance: 25.0 m, Point number: 15.9K , angle_compensate: 4, flip_x_axis 0
[recoveries_server-13] 1669128015.176417 [14] recoveries: using network interface enx806d9716512d (udp/10.45.1.56) selected arbitrarily from: enx806d9716512d, docker0
[static_transform_publisher-9] [INFO] [1669128015.475289911] [static_transform_publisher_t3vJln4BDFm6vPyE]: Spinning until killed publishing transform from 'base_link' to 'top'
[controller_server-11] 1669128015.701209 [14] controller: using network interface enx806d9716512d (udp/10.45.1.56) selected arbitrarily from: enx806d9716512d, docker0
[static_transform_publisher-8] [INFO] [1669128016.061899781] [static_transform_publisher_yHAkarh0EOWbM0eV]: Spinning until killed publishing transform from 'base_link' to 'rear_right_wheel'
[bt_navigator-14] 1669128016.248805 [14] bt_navigat: using network interface enx806d9716512d (udp/10.45.1.56) selected arbitrarily from: enx806d9716512d, docker0
[lifecycle_manager-16] [INFO] [1669128016.671443419] [lifecycle_manager_navigation]: Creating
[waypoint_follower-15] [INFO] [1669128017.028067911] [waypoint_follower]:
[waypoint_follower-15] waypoint_follower lifecycle node launched.
[waypoint_follower-15] Waiting on external lifecycle transitions to activate
[waypoint_follower-15] See https://design.ros2.org/articles/node_lifecycle.html for more information.
[waypoint_follower-15] [INFO] [1669128017.028967056] [waypoint_follower]: Creating
[static_transform_publisher-10] [INFO] [1669128017.097343443] [static_transform_publisher_a0CAK71zbxpMCukQ]: Spinning until killed publishing transform from 'base_link' to 'camera_link'
[recoveries_server-13] [INFO] [1669128017.993741922] [recoveries_server]:
[recoveries_server-13] recoveries_server lifecycle node launched.
[recoveries_server-13] Waiting on external lifecycle transitions to activate
[recoveries_server-13] See https://design.ros2.org/articles/node_lifecycle.html for more information.
[planner_server-12] [INFO] [1669128018.078049955] [planner_server]:
[planner_server-12] planner_server lifecycle node launched.
[planner_server-12] Waiting on external lifecycle transitions to activate
[planner_server-12] See https://design.ros2.org/articles/node_lifecycle.html for more information
[lifecycle_manager-16] [INFO] [1669128018.217148256] [lifecycle_manager_navigation]: e[34me[1mCreating and initializing lifecycle service clientse[0me[0m
[planner_server-12] [INFO] [1669128018.720113719] [planner_server]: Creating
[lifecycle_manager-16] [INFO] [1669128018.751184667] [lifecycle_manager_navigation]: e[34me[1mStarting managed nodes bringup...e[0me[0m
[lifecycle_manager-16] [INFO] [1669128018.751492456] [lifecycle_manager_navigation]: e[34me[1mConfiguring controller_servere[0me[0m
[bt_navigator-14] [INFO] [1669128018.866999053] [bt_navigator]:
[bt_navigator-14] bt_navigator lifecycle node launched.
[bt_navigator-14] Waiting on external lifecycle transitions to activate
[bt_navigator-14] See https://design.ros2.org/articles/node_lifecycle.html for more information.
[bt_navigator-14] [INFO] [1669128018.867905035] [bt_navigator]: Creating
[controller_server-11] [INFO] [1669128019.102897455] [controller_server]:
[controller_server-11] controller_server lifecycle node launched.
[controller_server-11] Waiting on external lifecycle transitions to activate
[controller_server-11] See https://design.ros2.org/articles/node_lifecycle.html for more information.
[controller_server-11] [INFO] [1669128019.667746903] [controller_server]: Creating controller server
[planner_server-12] [INFO] [1669128020.696628906] [global_costmap.global_costmap]:
[planner_server-12] global_costmap lifecycle node launched.
[planner_server-12] Waiting on external lifecycle transitions to activate
[planner_server-12] See https://design.ros2.org/articles/node_lifecycle.html for more information.
[planner_server-12] [INFO] [1669128020.794809050] [global_costmap.global_costmap]: Creating Costmap
[controller_server-11] [INFO] [1669128021.531425113] [local_costmap.local_costmap]:
[controller_server-11] local_costmap lifecycle node launched.
[controller_server-11] Waiting on external lifecycle transitions to activate
[controller_server-11] See https://design.ros2.org/articles/node_lifecycle.html for more information.
[controller_server-11] [INFO] [1669128021.543354828] [local_costmap.local_costmap]: Creating Costmap
[controller_server-11] [INFO] [1669128022.040965782] [controller_server]: Configuring controller interface
[controller_server-11] [INFO] [1669128022.098883042] [controller_server]: Controller frequency set to 10.0000Hz
[controller_server-11] [INFO] [1669128022.100411991] [local_costmap.local_costmap]: Configuring
[controller_server-11] [INFO] [1669128022.520653473] [local_costmap.local_costmap]: Using plugin "voxel_layer"
[controller_server-11] [INFO] [1669128022.735643809] [local_costmap.local_costmap]: Subscribed to Topics: scan
[controller_server-11] [INFO] [1669128023.224318719] [local_costmap.local_costmap]: Initialized plugin "voxel_layer"
[controller_server-11] [INFO] [1669128023.224652807] [local_costmap.local_costmap]: Using plugin "inflation_layer"
[controller_server-11] [INFO] [1669128023.405705813] [local_costmap.local_costmap]: Initialized plugin "inflation_layer"
[controller_server-11] [INFO] [1669128023.710086234] [controller_server]: Created progress_checker : progress_checker of type nav2_controller::SimpleProgressChecker
[controller_server-11] [INFO] [1669128023.740350520] [controller_server]: Created goal_checker : goal_checker of type nav2_controller::SimpleGoalChecker
[controller_server-11] [INFO] [1669128023.811372403] [controller_server]: Created controller : FollowPath of type dwb_core::DWBLocalPlanner
[controller_server-11] [INFO] [1669128023.880415321] [controller_server]: Setting transform_tolerance to 1.000000
[sync_slam_toolbox_node-17] 1669128023.955307 [14] sync_slam_: using network interface enx806d9716512d (udp/10.45.1.56) selected arbitrarily from: enx806d9716512d, docker0
[sync_slam_toolbox_node-17] [INFO] [1669128024.215356252] [slam_toolbox]: Node using stack size 40000000
[controller_server-11] [INFO] [1669128024.885082975] [controller_server]: Using critic "RotateToGoal" (dwb_critics::RotateToGoalCritic)
[controller_server-11] [INFO] [1669128024.932977412] [controller_server]: Critic plugin initialized
[controller_server-11] [INFO] [1669128024.948542862] [controller_server]: Using critic "Oscillation" (dwb_critics::OscillationCritic)
[controller_server-11] [INFO] [1669128024.990902870] [controller_server]: Critic plugin initialized
[controller_server-11] [INFO] [1669128025.014107107] [controller_server]: Using critic "BaseObstacle" (dwb_critics::BaseObstacleCritic)
[controller_server-11] [INFO] [1669128025.029095026] [controller_server]: Critic plugin initialized
[controller_server-11] [INFO] [1669128025.034787856] [controller_server]: Using critic "GoalAlign" (dwb_critics::GoalAlignCritic)
[controller_server-11] [INFO] [1669128025.055895399] [controller_server]: Critic plugin initialized
[controller_server-11] [INFO] [1669128025.062570356] [controller_server]: Using critic "PathAlign" (dwb_critics::PathAlignCritic)
[controller_server-11] [INFO] [1669128025.082273615] [controller_server]: Critic plugin initialized
[controller_server-11] [INFO] [1669128025.103853248] [controller_server]: Using critic "PathDist" (dwb_critics::PathDistCritic)
[controller_server-11] [INFO] [1669128025.137755597] [controller_server]: Critic plugin initialized
[controller_server-11] [INFO] [1669128025.151418639] [controller_server]: Using critic "GoalDist" (dwb_critics::GoalDistCritic)
[controller_server-11] [INFO] [1669128025.170202278] [controller_server]: Critic plugin initialized
[controller_server-11] [INFO] [1669128025.170516005] [controller_server]: Controller Server has FollowPath controllers available.
[lifecycle_manager-16] [INFO] [1669128025.455790159] [lifecycle_manager_navigation]: e[34me[1mConfiguring planner_servere[0me[0m
[planner_server-12] [INFO] [1669128025.458437714] [planner_server]: Configuring
[planner_server-12] [INFO] [1669128025.458734104] [global_costmap.global_costmap]: Configuring
[planner_server-12] [INFO] [1669128025.608639232] [global_costmap.global_costmap]: Using plugin "static_layer"
[sync_slam_toolbox_node-17] 1669128025.687739 [14] sync_slam_: using network interface enx806d9716512d (udp/10.45.1.56) selected arbitrarily from: enx806d9716512d, docker0
[planner_server-12] [INFO] [1669128025.793981834] [global_costmap.global_costmap]: Subscribing to the map topic (/map) with transient local durability
[planner_server-12] [INFO] [1669128025.820074959] [global_costmap.global_costmap]: Initialized plugin "static_layer"
[planner_server-12] [INFO] [1669128025.820404059] [global_costmap.global_costmap]: Using plugin "obstacle_layer"
[planner_server-12] [INFO] [1669128025.872274870] [global_costmap.global_costmap]: Subscribed to Topics: scan
[planner_server-12] [INFO] [1669128026.053334493] [global_costmap.global_costmap]: Initialized plugin "obstacle_layer"
[planner_server-12] [INFO] [1669128026.063866367] [global_costmap.global_costmap]: Using plugin "inflation_layer"
[planner_server-12] [INFO] [1669128026.116045947] [global_costmap.global_costmap]: Initialized plugin "inflation_layer"
[planner_server-12] [INFO] [1669128026.565261301] [planner_server]: Created global planner plugin GridBased of type nav2_navfn_planner/NavfnPlanner
[planner_server-12] [INFO] [1669128026.592676732] [planner_server]: Configuring plugin GridBased of type NavfnPlanner
[planner_server-12] [INFO] [1669128027.069572790] [planner_server]: Planner Server has GridBased planners available.
[lifecycle_manager-16] [INFO] [1669128027.180177878] [lifecycle_manager_navigation]: e[34me[1mConfiguring recoveries_servere[0me[0m
[recoveries_server-13] [INFO] [1669128027.184303874] [recoveries_server]: Configuring
[recoveries_server-13] [INFO] [1669128027.568577189] [recoveries_server]: Creating recovery plugin spin of type nav2_recoveries/Spin
[recoveries_server-13] [INFO] [1669128027.594847418] [recoveries_server]: Configuring spin
[sync_slam_toolbox_node-17] [INFO] [1669128027.858668783] [slam_toolbox]: Using solver plugin solver_plugins::CeresSolver
[recoveries_server-13] [INFO] [1669128027.943455607] [recoveries_server]: Creating recovery plugin backup of type nav2_recoveries/BackUp
[sync_slam_toolbox_node-17] [INFO] [1669128027.972218653] [slam_toolbox]: CeresSolver: Using SCHUR_JACOBI preconditioner.
[recoveries_server-13] [INFO] [1669128028.051366922] [recoveries_server]: Configuring backup
[recoveries_server-13] [INFO] [1669128028.304414042] [recoveries_server]: Creating recovery plugin wait of type nav2_recoveries/Wait
[recoveries_server-13] [INFO] [1669128028.321480163] [recoveries_server]: Configuring wait
[lifecycle_manager-16] [INFO] [1669128028.449028979] [lifecycle_manager_navigation]: e[34me[1mConfiguring bt_navigatore[0me[0m
[bt_navigator-14] [INFO] [1669128028.451846035] [bt_navigator]: Configuring
[sync_slam_toolbox_node-17] [INFO] [1669128028.530215826] [slam_toolbox]: Message Filter dropping message: frame 'laser' at time 1669128028.428 for reason 'Unknown'
[bt_navigator-14] [INFO] [1669128029.704759310] [bt_navigator_rclcpp_node]: Waiting for "compute_path_to_pose" action server
[bt_navigator-14] [INFO] [1669128029.711024725] [bt_navigator_rclcpp_node]: "ComputePathToPose" BtActionNode initialized
[bt_navigator-14] [INFO] [1669128029.738253502] [bt_navigator_rclcpp_node]: Waiting for "global_costmap/clear_entirely_global_costmap" service
[bt_navigator-14] [INFO] [1669128029.741294454] [bt_navigator_rclcpp_node]: "ClearGlobalCostmap-Context" BtServiceNode initialized
[sync_slam_toolbox_node-17] [INFO] [1669128029.777323173] [slam_toolbox]: Message Filter dropping message: frame 'laser' at time 1669128029.694 for reason 'Unknown'
[sync_slam_toolbox_node-17] [INFO] [1669128029.849016925] [slam_toolbox]: Message Filter dropping message: frame 'laser' at time 1669128029.775 for reason 'Unknown'
[bt_navigator-14] [INFO] [1669128029.858054974] [bt_navigator_rclcpp_node]: Waiting for "follow_path" action server
[bt_navigator-14] [INFO] [1669128029.861476111] [bt_navigator_rclcpp_node]: "FollowPath" BtActionNode initialized
[bt_navigator-14] [INFO] [1669128029.885639475] [bt_navigator_rclcpp_node]: Waiting for "local_costmap/clear_entirely_local_costmap" service
[bt_navigator-14] [INFO] [1669128029.898161044] [bt_navigator_rclcpp_node]: "ClearLocalCostmap-Context" BtServiceNode initialized
[bt_navigator-14] [INFO] [1669128029.931406592] [bt_navigator_rclcpp_node]: Waiting for "local_costmap/clear_entirely_local_costmap" service
[bt_navigator-14] [INFO] [1669128029.932112990] [bt_navigator_rclcpp_node]: "ClearLocalCostmap-Subtree" BtServiceNode initialized
[sync_slam_toolbox_node-17] [INFO] [1669128029.941997127] [slam_toolbox]: Message Filter dropping message: frame 'laser' at time 1669128029.846 for reason 'Unknown'
[bt_navigator-14] [INFO] [1669128029.960073438] [bt_navigator_rclcpp_node]: Waiting for "global_costmap/clear_entirely_global_costmap" service
[bt_navigator-14] [INFO] [1669128029.960787899] [bt_navigator_rclcpp_node]: "ClearGlobalCostmap-Subtree" BtServiceNode initialized
[sync_slam_toolbox_node-17] [INFO] [1669128030.051533370] [slam_toolbox]: Message Filter dropping message: frame 'laser' at time 1669128029.936 for reason 'Unknown'
[bt_navigator-14] [INFO] [1669128030.075794305] [bt_navigator_rclcpp_node]: Waiting for "spin" action server
[bt_navigator-14] [INFO] [1669128030.076933759] [bt_navigator_rclcpp_node]: "Spin" BtActionNode initialized
[sync_slam_toolbox_node-17] [INFO] [1669128030.122970035] [slam_toolbox]: Message Filter dropping message: frame 'laser' at time 1669128030.036 for reason 'Unknown'
[bt_navigator-14] [INFO] [1669128030.175968502] [bt_navigator_rclcpp_node]: Waiting for "wait" action server
[bt_navigator-14] [INFO] [1669128030.177384286] [bt_navigator_rclcpp_node]: "Wait" BtActionNode initialized
[lifecycle_manager-16] [INFO] [1669128030.198115217] [lifecycle_manager_navigation]: e[34me[1mConfiguring waypoint_followere[0me[0m
[waypoint_follower-15] [INFO] [1669128030.200073861] [waypoint_follower]: Configuring
[sync_slam_toolbox_node-17] [INFO] [1669128030.242206748] [slam_toolbox]: Message Filter dropping message: frame 'laser' at time 1669128030.116 for reason 'Unknown'
[lifecycle_manager-16] [INFO] [1669128030.652820110] [lifecycle_manager_navigation]: e[34me[1mActivating controller_servere[0me[0m
[controller_server-11] [INFO] [1669128030.658125484] [controller_server]: Activating
[controller_server-11] [INFO] [1669128030.658412438] [local_costmap.local_costmap]: Activating
[controller_server-11] [INFO] [1669128030.658609636] [local_costmap.local_costmap]: Checking transform
[controller_server-11] [INFO] [1669128030.659004632] [local_costmap.local_costmap]: Timed out waiting for transform from base_link to odom to become available, tf error: Could not find a connection between 'odom' and 'base_link' because they are not part of the same tree.Tf has two or more unconnected trees.
[rosserial_node.py-3] [INFO] [1669128032.745850140] [serial_node]: open port /dev/ttyS4
[rosserial_node.py-3] [INFO] [1669128032.771970531] [serial_node]: Requesting topics...
[rosserial_node.py-3] [INFO] [1669128032.835760095] [serial_node]: Note: publish buffer size is 512 bytes
[rosserial_node.py-3] [INFO] [1669128032.852238453] [serial_node]: Init service server for rosbot_ekf/Configuration
[sync_slam_toolbox_node-17] [INFO] [1669128032.858064415] [slam_toolbox]: Message Filter dropping message: frame 'laser' at time 1669128032.774 for reason 'Unknown'
[rosserial_node.py-3] [INFO] [1669128032.922372940] [serial_node]: Setup service server on config [rosbot_ekf/Configuration]
[sync_slam_toolbox_node-17] [INFO] [1669128033.132033282] [slam_toolbox]: Message Filter dropping message: frame 'laser' at time 1669128033.055 for reason 'Unknown'
[controller_server-11] [INFO] [1669128033.159032587] [local_costmap.local_costmap]: Timed out waiting for transform from base_link to odom to become available, tf error: Could not find a connection between 'odom' and 'base_link' because they are not part of the same tree.Tf has two or more unconnected trees.
[sync_slam_toolbox_node-17] [INFO] [1669128033.200021133] [slam_toolbox]: Message Filter dropping message: frame 'laser' at time 1669128033.129 for reason 'Unknown'
[controller_server-11] [INFO] [1669128035.659126501] [local_costmap.local_costmap]: Timed out waiting for transform from base_link to odom to become available, tf error: Could not find a connection between 'odom' and 'base_link' because they are not part of the same tree.Tf has two or more unconnected trees.
[sync_slam_toolbox_node-17] [INFO] [1669128035.664088252] [slam_toolbox]: Message Filter dropping message: frame 'laser' at time 1669128035.556 for reason 'Unknown'
[controller_server-11] [INFO] [1669128036.659016455] [local_costmap.local_costmap]: Timed out waiting for transform from base_link to odom to become available, tf error: Could not find a connection between 'odom' and 'base_link' because they are not part of the same tree.Tf has two or more unconnected trees.
[sync_slam_toolbox_node-17] [INFO] [1669128036.690008627] [slam_toolbox]: Message Filter dropping message: frame 'laser' at time 1669128036.616 for reason 'Unknown'
[sync_slam_toolbox_node-17] [INFO] [1669128036.766008329] [slam_toolbox]: Message Filter dropping message: frame 'laser' at time 1669128036.688 for reason 'Unknown'
[controller_server-11] [INFO] [1669128037.159004317] [local_costmap.local_costmap]: Timed out waiting for transform from base_link to odom to become available, tf error: Could not find a connection between 'odom' and 'base_link' because they are not part of the same tree.Tf has two or more unconnected trees.
[rosserial_node.py-3] [INFO] [1669128037.536663931] [serial_node]: Setup publisher on pose [geometry_msgs/PoseStamped]
[sync_slam_toolbox_node-17] [INFO] [1669128037.544408231] [slam_toolbox]: Message Filter dropping message: frame 'laser' at time 1669128037.468 for reason 'Unknown'
[rosserial_node.py-3] [INFO] [1669128037.584317822] [serial_node]: Setup publisher on velocity [geometry_msgs/Twist]
[sync_slam_toolbox_node-17] [INFO] [1669128037.614201515] [slam_toolbox]: Message Filter dropping message: frame 'laser' at time 1669128037.542 for reason 'Unknown'
[rosserial_node.py-3] [INFO] [1669128037.624444797] [serial_node]: Setup publisher on range/fr [sensor_msgs/Range]
[rosserial_node.py-3] [INFO] [1669128037.652484836] [serial_node]: Setup publisher on range/fl [sensor_msgs/Range]
[controller_server-11] [INFO] [1669128037.659036486] [local_costmap.local_costmap]: Timed out waiting for transform from base_link to odom to become available, tf error: Could not find a connection between 'odom' and 'base_link' because they are not part of the same tree.Tf has two or more unconnected trees.
[rosserial_node.py-3] [INFO] [1669128037.678089878] [serial_node]: Setup publisher on range/rr [sensor_msgs/Range]
[sync_slam_toolbox_node-17] [INFO] [1669128037.687439312] [slam_toolbox]: Message Filter dropping message: frame 'laser' at time 1669128037.612 for reason 'Unknown'
[rosserial_node.py-3] [INFO] [1669128037.732497329] [serial_node]: Setup publisher on range/rl [sensor_msgs/Range]
[sync_slam_toolbox_node-17] [INFO] [1669128037.764948848] [slam_toolbox]: Message Filter dropping message: frame 'laser' at time 1669128037.683 for reason 'Unknown'
[rosserial_node.py-3] [INFO] [1669128037.799724637] [serial_node]: Setup publisher on joint_states [sensor_msgs/JointState]
[sync_slam_toolbox_node-17] [INFO] [1669128037.834775830] [slam_toolbox]: Message Filter dropping message: frame 'laser' at time 1669128037.759 for reason 'Unknown'
[rosserial_node.py-3] [INFO] [1669128037.902185487] [serial_node]: Setup publisher on imu [sensor_msgs/Imu]
[sync_slam_toolbox_node-17] [INFO] [1669128037.943342212] [slam_toolbox]: Message Filter dropping message: frame 'laser' at time 1669128037.828 for reason 'Unknown'
[sync_slam_toolbox_node-17] [INFO] [1669128038.008580540] [slam_toolbox]: Message Filter dropping message: frame 'laser' at time 1669128037.901 for reason 'Unknown'
[rosserial_node.py-3] [INFO] [1669128038.055316252] [serial_node]: Setup publisher on buttons [std_msgs/UInt8]
[sync_slam_toolbox_node-17] [INFO] [1669128038.106984657] [slam_toolbox]: Message Filter dropping message: frame 'laser' at time 1669128037.996 for reason 'Unknown'
[rosserial_node.py-3] [INFO] [1669128038.123937891] [serial_node]: Note: subscribe buffer size is 512 bytes
[sync_slam_toolbox_node-17] [INFO] [1669128038.143360458] [slam_toolbox]: Message Filter dropping message: frame 'laser' at time 1669128038.100 for reason 'Unknown'
[controller_server-11] [INFO] [1669128038.159026072] [local_costmap.local_costmap]: Timed out waiting for transform from base_link to odom to become available, tf error: Could not find a connection between 'odom' and 'base_link' because they are not part of the same tree.Tf has two or more unconnected trees.
[rosserial_node.py-3] [INFO] [1669128038.236526692] [serial_node]: Setup subscriber on cmd_vel [geometry_msgs/Twist]
[rosserial_node.py-3] [INFO] [1669128038.330926912] [serial_node]: Setup subscriber on cmd_ser [std_msgs/UInt32]
[rosserial_node.py-3] [INFO] [1669128038.476259127] [serial_node]:
[rosserial_node.py-3]
[rosserial_node.py-3] Firmware version: 0.15.0
[rosserial_node.py-3]
[rosserial_node.py-3]
[rosserial_node.py-3] [INFO] [1669128038.506738231] [serial_node]: Detected sensor: BNO055_ADDR_B
[rosserial_node.py-3]
[sync_slam_toolbox_node-17] [INFO] [1669128038.538814106] [slam_toolbox]: Message Filter dropping message: frame 'laser' at time 1669128038.463 for reason 'Unknown'
[sync_slam_toolbox_node-17] [INFO] [1669128038.613225212] [slam_toolbox]: Message Filter dropping message: frame 'laser' at time 1669128038.536 for reason 'Unknown'
[controller_server-11] [INFO] [1669128038.660050918] [local_costmap.local_costmap]: start
[sync_slam_toolbox_node-17] [INFO] [1669128038.693375977] [slam_toolbox]: Message Filter dropping message: frame 'laser' at time 1669128038.610 for reason 'Unknown'
[lifecycle_manager-16] [INFO] [1669128038.731346150] [lifecycle_manager_navigation]: e[34me[1mActivating planner_servere[0me[0m
[planner_server-12] [INFO] [1669128038.733255249] [planner_server]: Activating
[planner_server-12] [INFO] [1669128038.733541828] [global_costmap.global_costmap]: Activating
[planner_server-12] [INFO] [1669128038.733739989] [global_costmap.global_costmap]: Checking transform
[planner_server-12] [INFO] [1669128038.734591090] [global_costmap.global_costmap]: start
[planner_server-12] [INFO] [1669128038.746865912] [planner_server]: Activating plugin GridBased of type NavfnPlanner
[lifecycle_manager-16] [INFO] [1669128038.752547888] [lifecycle_manager_navigation]: e[34me[1mActivating recoveries_servere[0me[0m
[lifecycle_manager-16] [INFO] [1669128038.766096918] [lifecycle_manager_navigation]: e[34me[1mActivating bt_navigatore[0me[0m
[lifecycle_manager-16] [INFO] [1669128038.778641559] [lifecycle_manager_navigation]: e[34me[1mActivating waypoint_followere[0me[0m
[recoveries_server-13] [INFO] [1669128038.755083954] [recoveries_server]: Activating
[recoveries_server-13] [INFO] [1669128038.755366909] [recoveries_server]: Activating spin
[recoveries_server-13] [INFO] [1669128038.755564994] [recoveries_server]: Activating backup
[recoveries_server-13] [INFO] [1669128038.755755480] [recoveries_server]: Activating wait
[sync_slam_toolbox_node-17] [INFO] [1669128038.761422632] [slam_toolbox]: Message Filter dropping message: frame 'laser' at time 1669128038.686 for reason 'Unknown'
[bt_navigator-14] [INFO] [1669128038.767815006] [bt_navigator]: Activating
[waypoint_follower-15] [INFO] [1669128038.780466252] [waypoint_follower]: Activating
[lifecycle_manager-16] [INFO] [1669128038.803649146] [lifecycle_manager_navigation]: e[34me[1mManaged nodes are activee[0me[0m
[sync_slam_toolbox_node-17] [INFO] [1669128038.823778062] [slam_toolbox]: Message Filter dropping message: frame 'laser' at time 1669128038.758 for reason 'Unknown'
**(more messages, deleted due to the character limit)**
[controller_server-11] [INFO] [1669128070.968506728] [local_costmap.local_costmap_rclcpp_node]: Message Filter dropping message: frame 'laser' at time 1669128067.345 for reason 'Unknown'
[sync_slam_toolbox_node-17] [INFO] [1669128070.984947774] [slam_toolbox]: Message Filter dropping message: frame 'laser' at time 1669128070.912 for reason 'Unknown'
[planner_server-12] [INFO] [1669128070.986386437] [global_costmap.global_costmap_rclcpp_node]: Message Filter dropping message: frame 'laser' at time 1669128067.416 for reason 'Unknown'
[controller_server-11] [INFO] [1669128071.003816264] [local_costmap.local_costmap_rclcpp_node]: Message Filter dropping message: frame 'laser' at time 1669128067.366 for reason 'Unknown'
**[planner_server-12] [ERROR] [1669128071.043099539] [getCurrentPose]: Extrapolation Error looking up robot pose: Lookup would require extrapolation into the past. Requested time 1669128043.801577 but the earliest data is at time 1669128061.759587, when looking up transform from frame [base_link] to frame [map]**
**[planner_server-12]**
(I had to delete some of the repeated lines form the log, because of the limit of characters allowed)
And I also attach you a couple of screenshots from Rviz2:

I have reinstalled the image and the firmware a few times, but I always have the same problem.
Thanks in advance.