Hello. I am a student studying ROS using rosbot 2.0.
I am following the page below.
If I proceed with the PlatformIO: build, it fails because there is no ImuDriver.h file.
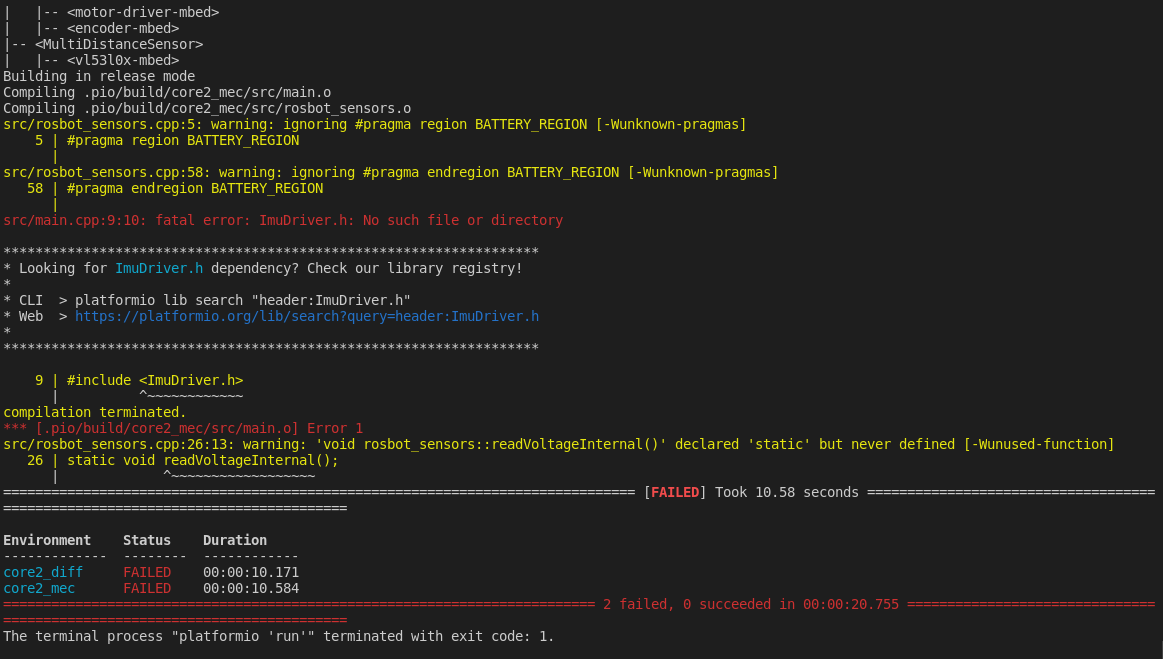
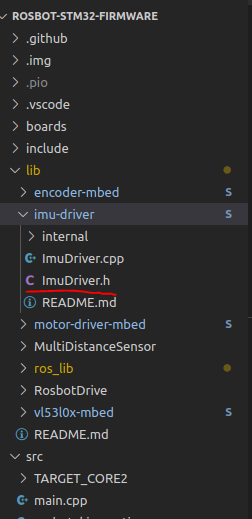
But ImuDriver.h does exist.
How can I fix it?
Thanks for reading.
Hello. I am a student studying ROS using rosbot 2.0.
I am following the page below.
If I proceed with the PlatformIO: build, it fails because there is no ImuDriver.h file.
But ImuDriver.h does exist.
How can I fix it?
Thanks for reading.
Hi Chokings,
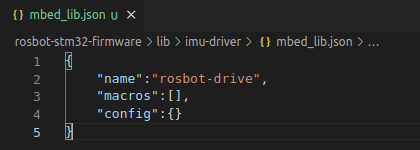
adding new mbed_lib.json file will solve your problem.
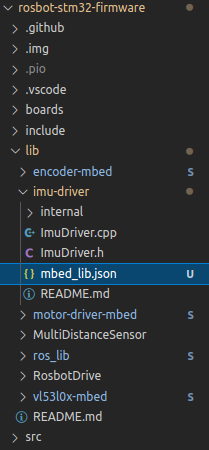
Just imput there this lines:
{
"name":"imu-driver",
"macros":[],
"config":{}
}
Best regards,
Paweł
Thank you very much for your reply.
Build completed successfully.
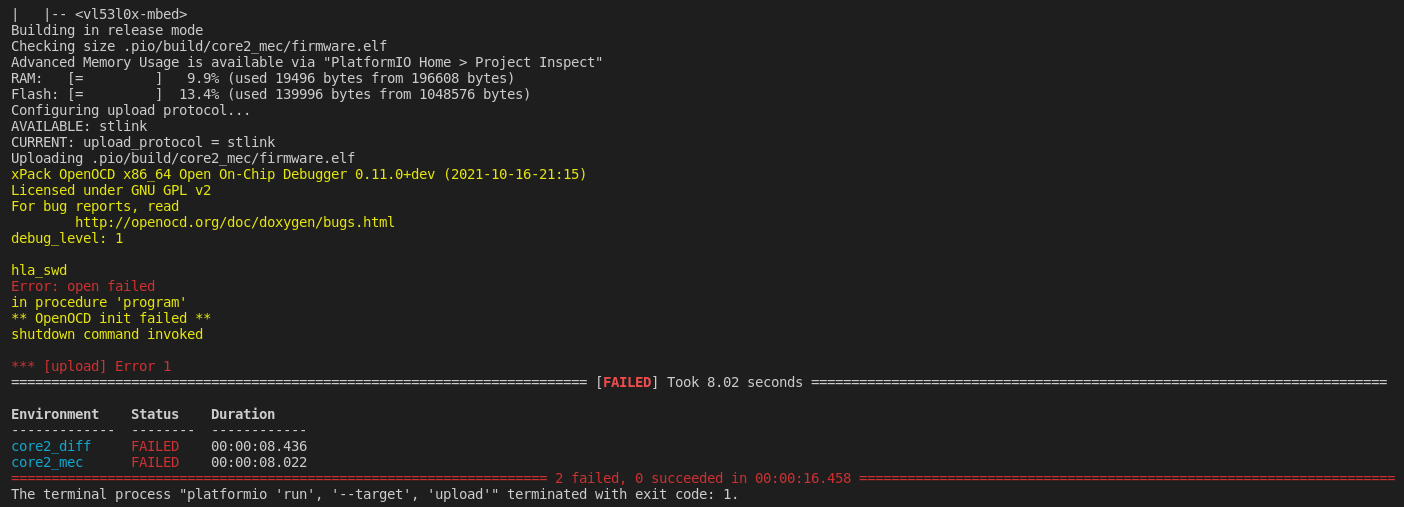
However, when I start upload using PlatformIO: Upload, an error occurs and the upload fails.
How can I solve it?
Thank you!
Hi,
I have a better solution for you. You can use stm32loader, which should be ready to run on your rosbot.
All you need is firmware.bin file you can find there:
<dir/to/pio/workspace>/.pio/build/core2_diff/firmware.bin
You just need to :
Use PlatformIO: Build
Replace the firmware.bin file with the one that already exist on the robot (e.g. using sftp). In my case, this is what the robot home directory looks like:

./flash_firmware.sh - using this command you will run a script which will flash the firmware with stm32loader.After a little while:
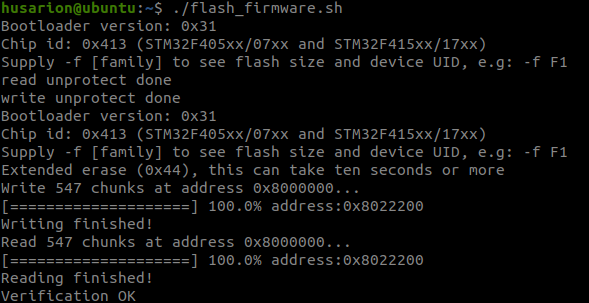
I hope this solution suits you. If you have any questions/troubles, do not hesitate to ask.
Best regards,
Paweł
Thanks for the easy way.
./flash_firmware.sh can flash the firmware.
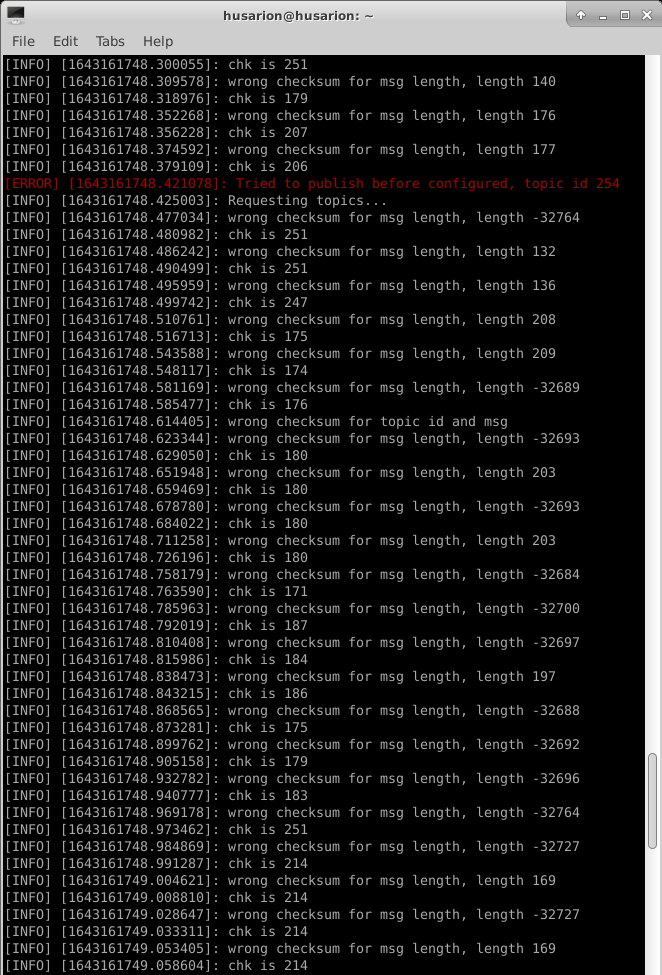
However, when roslaunch rosbot_ekf all.launch is executed, the same error message is repeated.
I modified the code to publish pwm.
https://github.com/pkowalsk1/rosbot-stm32-firmware/commit/928b7299a0f90a3c260a1074dcc8eca84a148c2e
How can I solve this?
thank you.
Hi,
can you tell me about which ROS and Ubuntu image version you are using? Are you sure you have the latest version of rosbot_ekf and rosbot_description packages?
Best regards,
Paweł
Hi,
I downloaded it from the link below.
Thank you.
Hi chokings,
There is few different images on page Husarion Downloads. May I ask you to specify which one did you used 
Best regards,
Hubert
I used * Ubuntu 18.04 + ROS Melodic + Docker + Husarnet client
Thank you.
Hi,
You said that:
Does this mean you checked if my version (without modification) works on your device?
If that works, please check your serial_baudrate in this rosbot_ekf package launch file. It should be 525000.
Please, check it and let me know about it. If you have any questions/troubles, do not hesitate to ask.
Best regards,
Paweł
Hi,
After editing the rosserial_bridge.launch file, I was confirmed that the pwm signal was published normally.
But I wonder why I get a value of 1.0 when the wheel is not moving?
Thank you so much for your help in solving the problem.
Hi,
It is becouse:
Best regards,
Paweł
Hi.
In the previous code, I modified the code to get the PWM values of each of the 4 motors.
I changed std_msgs/Float32.h - > std_msgs/Float32MultiArray.h.
And also, i changed pwm publish part.
// PWM
float pwm[] = {0, 0, 0, 0};
if (pwm_publish_flag)
{
// Get duty cycle
// '(RosbotMotNum)1' corresponds to Motor1
pwm[0] = RosbotDrive::getInstance().getSpeed((RosbotMotNum)1, SpeedMode::DUTY_CYCLE);
pwm[1] = RosbotDrive::getInstance().getSpeed((RosbotMotNum)2, SpeedMode::DUTY_CYCLE);
pwm[2] = RosbotDrive::getInstance().getSpeed((RosbotMotNum)3, SpeedMode::DUTY_CYCLE);
pwm[3] = RosbotDrive::getInstance().getSpeed((RosbotMotNum)4, SpeedMode::DUTY_CYCLE);
pwm_msg.data = pwm;
if (nh.connected())
pwm_pub->publish(&pwm_msg);
}
After flashing my rosbot, I launched “roslaunch rosbot_ekf all.launch”
Then, the following error occurs.
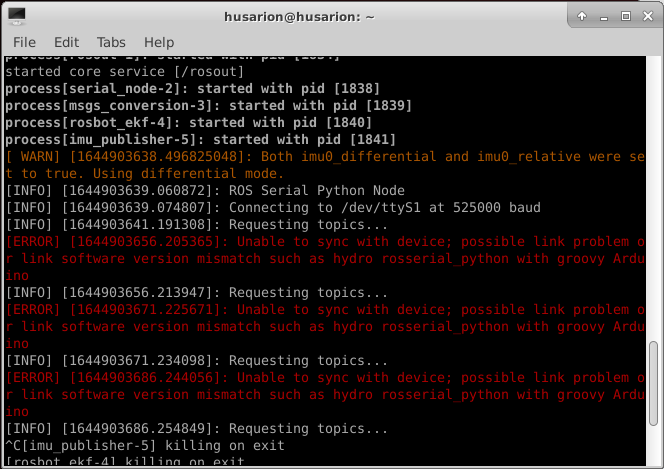
How can I fix it?
Thank you!
Hi,
the buffer seems to be over filled ( see q/a ). Try increasing the buffer size or reducing the message size.
Best regards,
Paweł
Hi,
I checked the 3 links below.
http://wiki.ros.org/rosserial/Overview/Limitations
https://answers.ros.org/question/73627/how-to-increase-rosserial-buffer-size/
Now I know there is a limit in the message.
I modified it like the code below, but the same error as before occurred.
// PWM
float pwm[4] = {0, 0, 0, 0};
if (pwm_publish_flag)
{
// Get duty cycle
// '(RosbotMotNum)1' corresponds to Motor1
pwm[0] = RosbotDrive::getInstance().getSpeed((RosbotMotNum)1, SpeedMode::DUTY_CYCLE);
pwm[1] = RosbotDrive::getInstance().getSpeed((RosbotMotNum)2, SpeedMode::DUTY_CYCLE);
pwm[2] = RosbotDrive::getInstance().getSpeed((RosbotMotNum)3, SpeedMode::DUTY_CYCLE);
pwm[3] = RosbotDrive::getInstance().getSpeed((RosbotMotNum)4, SpeedMode::DUTY_CYCLE);
pwm_msg.data = pwm;
if (nh.connected())
pwm_pub->publish(&pwm_msg);
}
and I changed buffer size in ros_lib/ros/node_handle.h.
increased from default 512 to 1024.
But the problem was not solved.
The same error message is repeated.
How can I solve it?
Thank you!
Hi,
I’m afraid your question is not related to the Husarion products. You can ask a question on the official ROS website.
Best regards,
Paweł