Hi,
I’m having problem in making the rplidar A3 working.
Following the documentation I cloned the driver from the github indicated.
I first had to make some small fix to make the node launching, but then, after few seconds the node is crashing.
Is this a current working repo for this lidar on ROS2 Foxy?
Hi Gianstiff,
Please check this repository. We forked it some time ago and made some improvements, but now it’s more up to date. You can try it, and share the results 
In our use cases, we are using docker containers, one running RpLidar on ROS and a second with ROS2 bridge. It’s works very well! I’m suggesting to use this solution You can find it here.
Best regards,
Hubert
Hi Hubert,
Please check this repository . We forked it some time ago and made some improvements, but now it’s more up to date. You can try it, and share the results.
I’ve already had some tests with this repo and, for information only, I’ve also recently discovered that there is also this new one released by Slamtec.
I’ve been able to test both of them and they seems quite working with slam_toolbox library.
Anyhow, I still have some troubles with the navigation2 library but, since I had similar issues with another lidar, I feel like the issue now can be more related to my navigation2 setup (I will try to investigate it in the ros dedicated community).
In our use cases, we are using docker containers, one running RpLidar on ROS and a second with ROS2 bridge. It’s works very well! I’m suggesting to use this solution  You can find it here .
You can find it here .
This seems quite a good alternative which I can test too, thanks!
Just one last question:
Looking at the rosbot launch files, I noticed this specific TF which is not that clear to me.
Is it related to the lidar clockwise rotation?
If you could help me in better understand this, it would be more than appreciated!
Thanks a lot for your help,
Gianstiff
Hi Hubert,
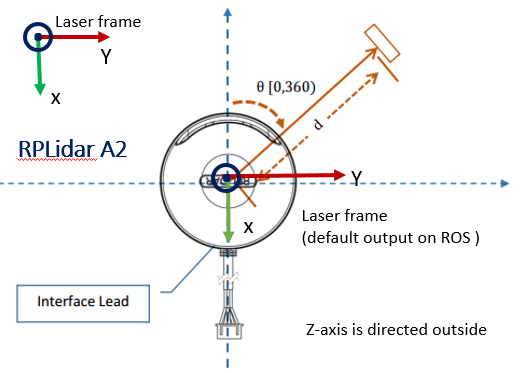
It’s quite easy. RPLIDAR has front in cables exit side (marked as “Interface Lead” on your image") . On ROSbot is’s mounted in reverse direction (cables point to the back side of robot). That’s why we need to transform “yaw”
Best regards,
Hubert
1 Like
