Hi,
After following the instructions here to upgrade to ros2 foxy, im unable to run teleop_twist_keyboard
ros2 run teleop_twist_keyboard teleop_twist_keyboard
gives no errors but the rosbot 2.0 pro does not respond to inputs from the keyboard
Hi,
After following the instructions here to upgrade to ros2 foxy, im unable to run teleop_twist_keyboard
ros2 run teleop_twist_keyboard teleop_twist_keyboard
gives no errors but the rosbot 2.0 pro does not respond to inputs from the keyboard
Hi frp
did you update firmware on CORE2 board?
Different ROS versions have slight variations in topic message definitions. Since CORE2 is connected to ROS network and is directly receiving ROS topics its firmware has to be re-uploaded each time you are changing ROS distribution.
In order to update firmware on your board run the following commands:
cd ~
./flash_firmware.sh
After successful installation teleop_twist_keyboard should work just fine.
Best regards,
Krzysztof Wojciechowski.
Hi,
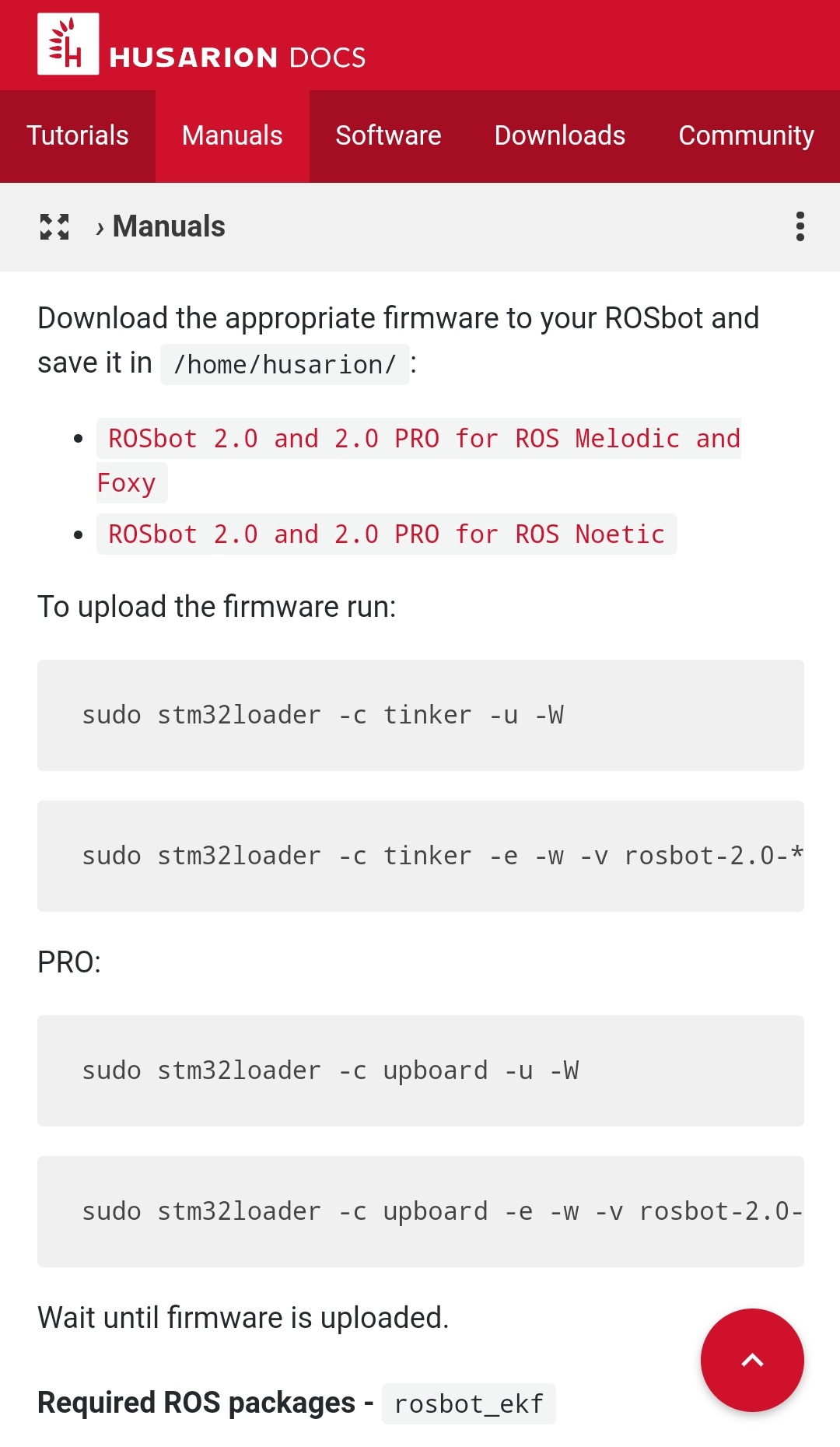
Thanks for replying. Yes I have tried flashing flash_firmware.sh as well as the rosbot-2.0-fw-v0.14.3.bin from the above screenshot. But I’m still unable to move the rosbot.
oh I realized there was a new update for the Ubuntu image. Will try that out first
Hi frp,
script flash_firmware.sh does exactly the same thing as those commands so there is no need to flash firmware in both ways. Since it’s our newer way of flashing firmware I would suggest using the script.
Also, I hope the new image will solve your problem.
Best regards,
Krzysztof Wojciechowski.
Oh thank you. I’ll reflash the flash_firmware.sh script then. I upgraded the Ubuntu image and it worked! Do you know how often a new image for the rosbot is released?
Hi frp,
I’m glad to see it works.
Normally we release new images every 3 months. It might slightly variate, but we do our best to release them on time.
Best regards,
Krzysztof Wojciechowski.
Hi,
Do you know why I have to run
ros2 launch rosbot_description rosbot_pro.launch.py
before
ros2 run teleop_twist_keyboard teleop_twist_keyboard
If I run the second command by itself teleop twist keyboard will not work.
Thank you
Hi frp,
rosbot_pro.launch.py starts all required nodes for ROSbot Pro. It starts nodes for lidar, serial communication with hardware responsible for motor movement, IMU and many others.
Best regards,
Krzysztof Wojciechowski.
Hi,
So it’s similar to roscore in ros1?
In ROS 1 you have to launch similar launch file on ROSbot. Roscore starts ROS master on a given device and is independent to this launch.
This launch file only starts nodes specific for ROSbot allowing communication with it’s hardware.
Best regards,
Krzysztof Wojciechowski.