Hello everybody,
When I’m trying to visualize robot with Rviz I’m getting errors:
-
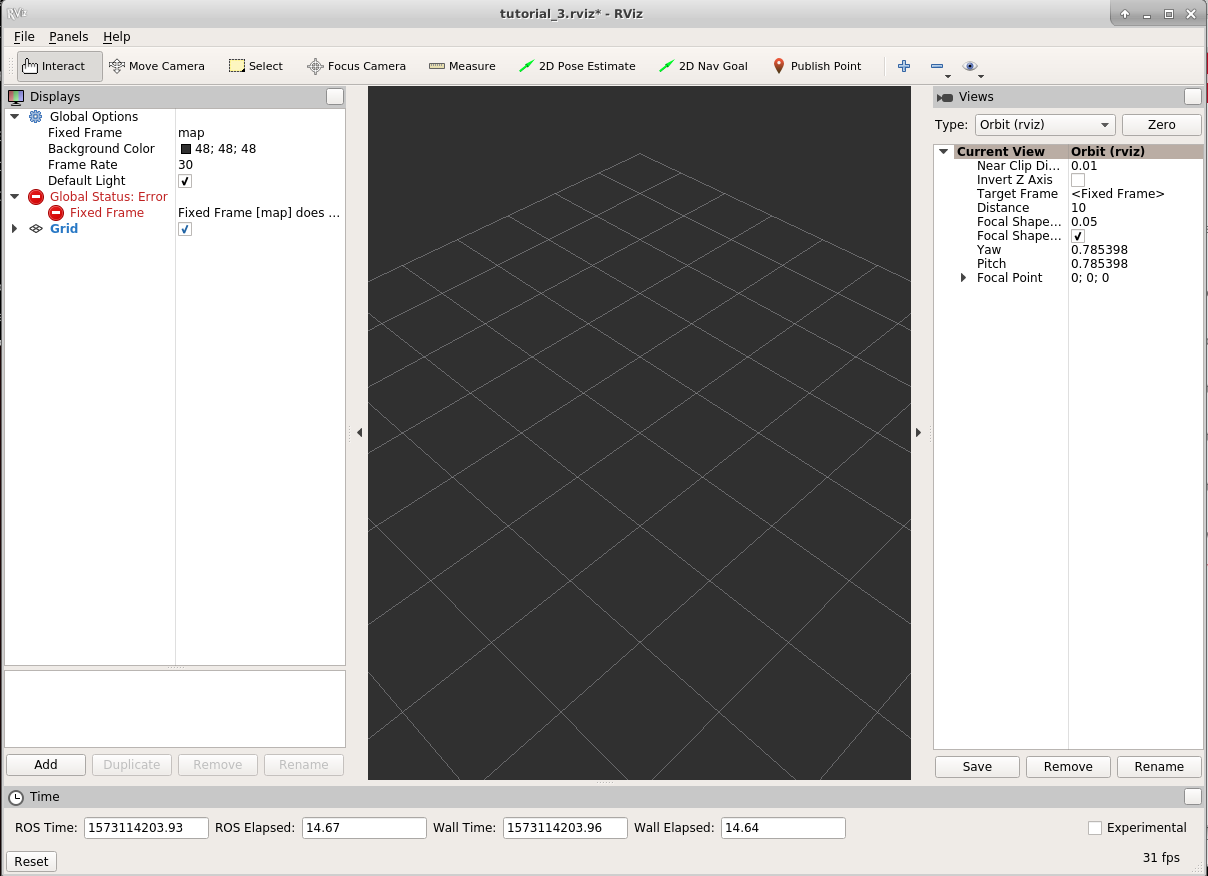
When I open Rviz I’m getting in visualized items list error:
Global Status: Error
Fixed Frame Fixed Frame [map] does not exist -
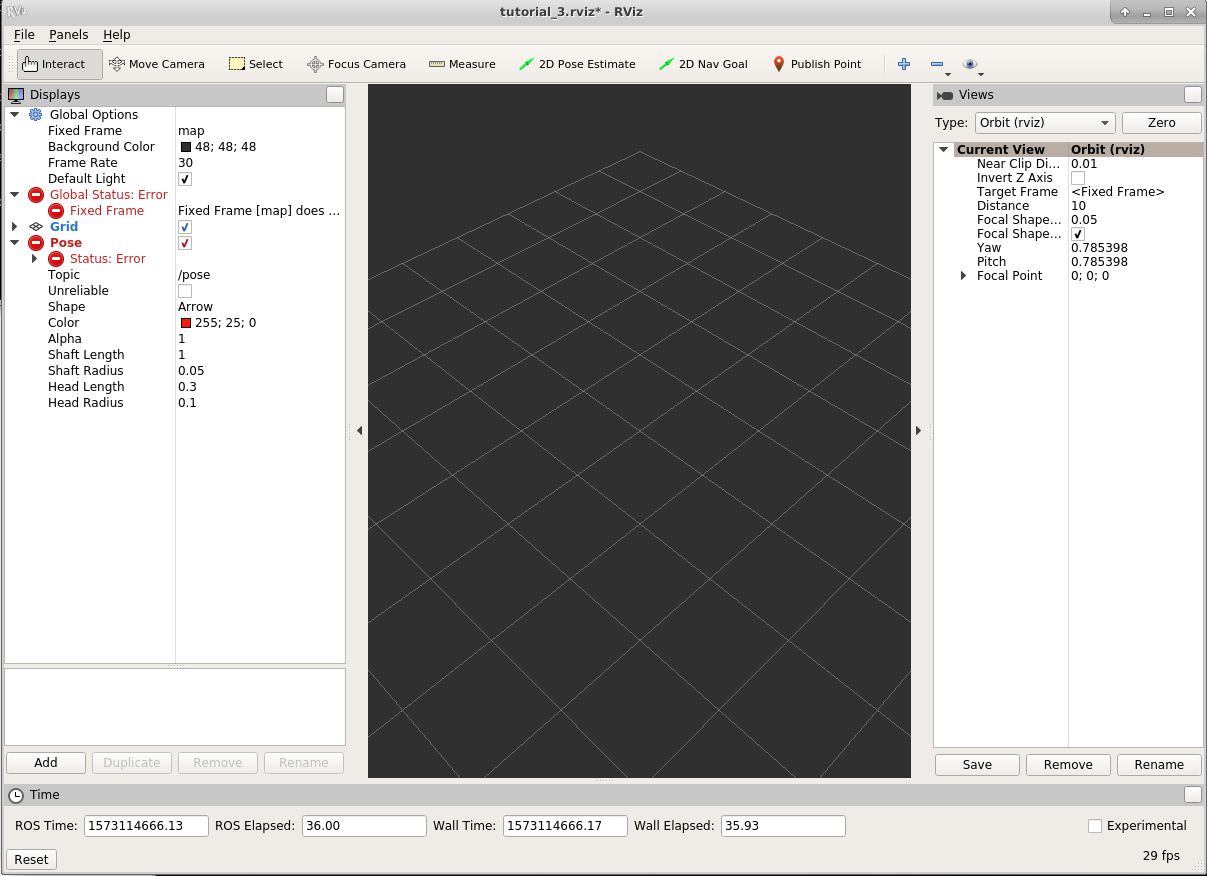
After adding pose I’m getting error:
Pose
Status: Error
Transform [sender=unknown_publisher]: For frame [odom] Fixed Frame [map] does not exist