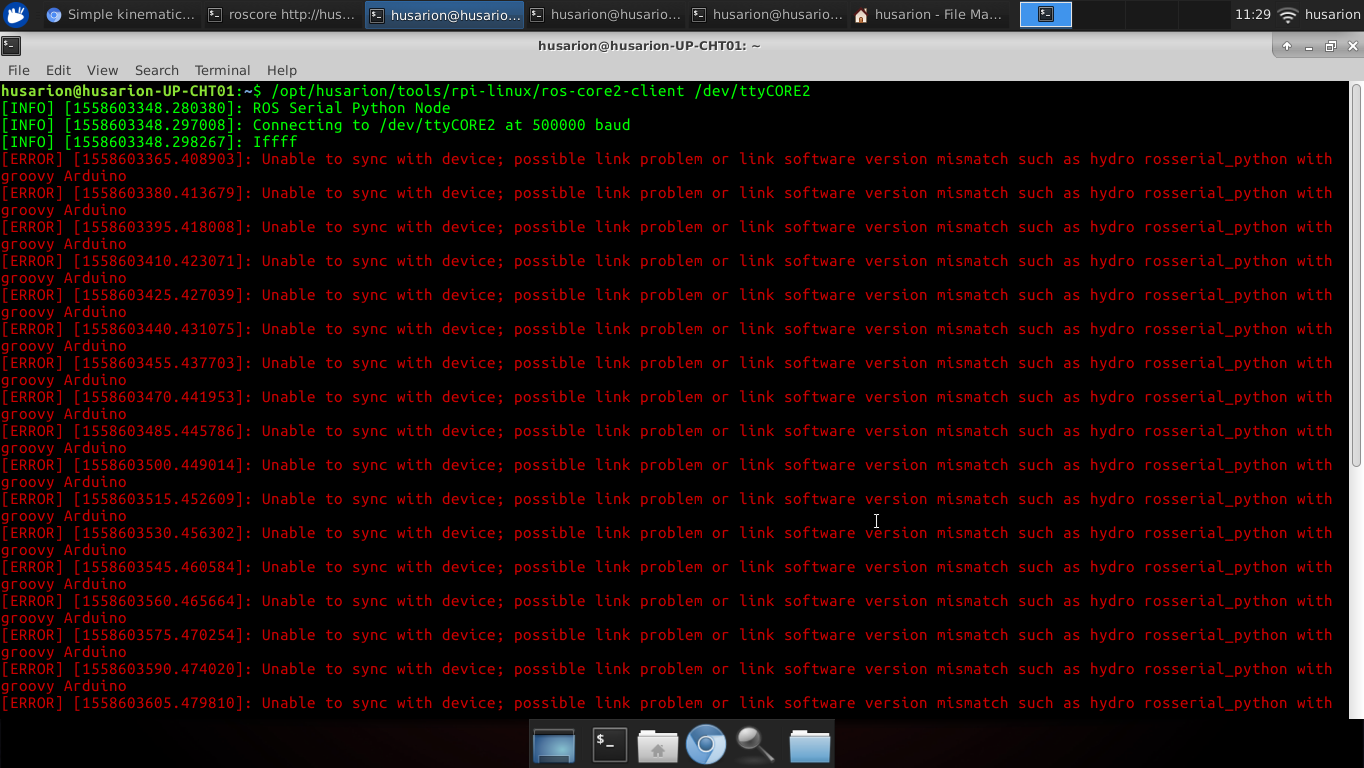
While working on ROS Tutorials from the website on moving rosbot. I keep getting the following error for the bridge program.
Can anyone explain the error and ways to resolve it ?
While working on ROS Tutorials from the website on moving rosbot. I keep getting the following error for the bridge program.
Can anyone explain the error and ways to resolve it ?
Hello Pradeep_BV,
From the screen I am guessing that you are working with ROS Tutorial 3 on ROSbot 2.0 PRO.
In example code there is parameter 'baudrate`:
uint32_t baudrate = 500000; // for ROSbot 2.0
// uint32_t baudrate = 230400; // for ROSbot 2.0 PRO
Value of this parameter will vary depending on which device you are using.
Comment line for ROSbot 2.0 and uncomment line for ROSbot 2.0 PRO.
Try again after this modification.
Regards,
Łukasz