We just got our ROSbot XL recently. I was following through the quick guide. At the part where I needed to connect the robot to the keyboard and mouse, via USB ports, I noticed that the two ports at the rear of the robot are not working. I have tested the mouse and keyboard but they’re fine. I am, however, able to use the USB ports in the Intel NUC itself.
What could be the possible reason why the USB ports at the rear are not working? I am wondering if it is related to an error when flashing the firmware coz I’m getting “Cannot find serial port automatically.”
Hi @Dhon_G,
it seems like the connection between SBC (NUC) and Digital Board can not be found.
The flashing issue and missed USB ports on rear panel is related because all these ports are connected to USB Hub on the Digital Board. You can see more here ROSbot XL Manual | Husarion.
Thanks for your reply.
I tried what you suggested and here’s the details.
All LEDs are OFF. Only the power button light is ON.
Here’s the output of lsusb command.
husarion@husarion:~$ lsusb
Bus 001 Device 001: ID 1d6b:0002 Linux Foundation 2.0 root hub
Bus 002 Device 001: ID 1d6b:0003 Linux Foundation 3.0 root hub
Bus 003 Device 001: ID 1d6b:0002 Linux Foundation 2.0 root hub
Bus 003 Device 002: ID 8087:0033 Intel Corp. AX211 Bluetooth
Bus 004 Device 001: ID 1d6b:0003 Linux Foundation 3.0 root hub
husarion@husarion:~$
3.USB 2.0 hub upstream port is well connected to the NUC port.
4. Used another cable and still not working. I also tried changing ports at the NUC. No luck.
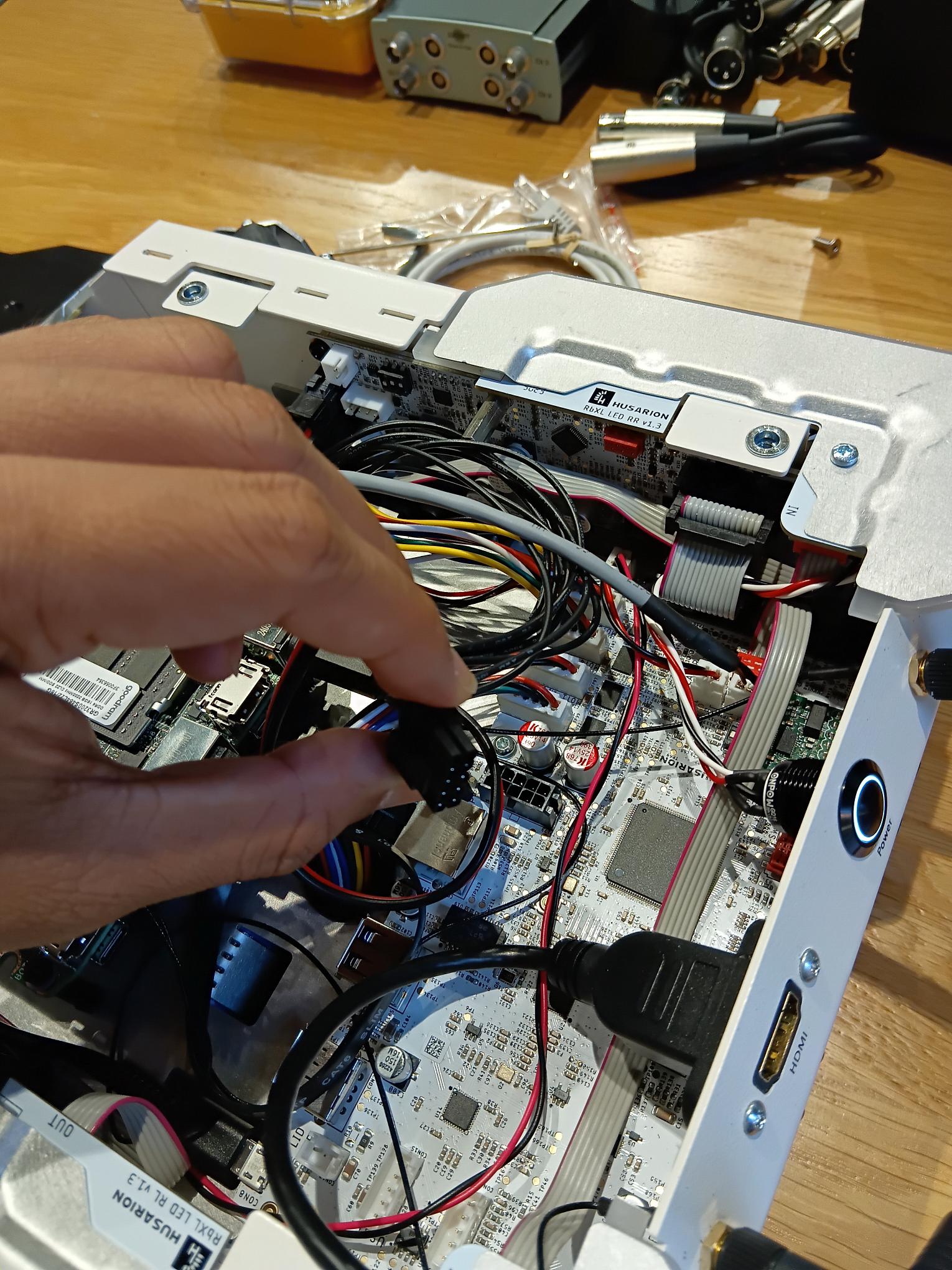
It seems to me that the digital board is not powered. I noticed that there is a molex header connector that is just hanging on one end. It is connected to the power board on another end. I suspect that the other end will have to go to the PWR_CON slot on the digital board. But I’m so afraid to try and connect it as I might damage the board. Can you confirm this?
Hi @Dhon_G,
it is definitely the power problem. This connector should be plug in to this socket. The flashing problem, not lightning LEDs and not working rear USB ports are the issues caused by not powered Digital Board. When you plug the connector everything should be fine.
I have another issue though. Now I am able to flash the firmware but I it seems that I can’t start the driver - ~/ros_driver_start.sh. When I run the utility script, I’m actually not sure if it’s doing anything. The robot also does not move when I tried teleop with keyboard - ros2 run teleop_twist_keyboard teleop_twist_keyboard. I checked the topic and node lists, they seem fine (I guess).
husarion@husarion:~$ ~/ros_driver_start.sh
[sudo] password for husarion:
husarion@husarion:~$
husarion@husarion:~$
husarion@husarion:~$
husarion@husarion:~$
husarion@husarion:~$ ros2 topic list
/battery_state
/cmd_vel
/controller_manager/introspection_data/full
/controller_manager/introspection_data/names
/controller_manager/introspection_data/values
/diagnostics
/dynamic_joint_states
/imu_broadcaster/imu
/joint_state_broadcaster/transition_event
/joint_states
/joy
/joy/set_feedback
/laser_filter/transition_event
/odometry/filtered
/parameter_events
/robot_description
/rosbot_base_controller/odom
/rosbot_base_controller/transition_event
/rosout
/scan
/scan_filtered
/set_pose
/tf
/tf_static
husarion@husarion:~$
husarion@husarion:~$
husarion@husarion:~$
husarion@husarion:~$ ros2 node list
WARNING: Be aware that there are nodes in the graph that share an exact name, which can have unintended side effects.
/controller_manager
/ekf_node
/foxglove_bridge
/foxglove_bridge
/imu_broadcaster
/imu_sensor_node
/joint_state_broadcaster
/joy2twist
/joy_node
/laser_filter
/laser_filter
/robot_state_publisher
/rosbot_base_controller
/rosbot_system_node
/stm32_node
/transform_listener_impl_57f3ed0c9190
/transform_listener_impl_5b0772e1b708
husarion@husarion:~$
I checked the ROS2 installed and it’s actually Jazzy. I was expecting Humble as mentioned in the quick start guide. Would you recommend I install Humble instead? I haven’t tried docker way yet.
Here’s the logs (see attached) sudo snap logs rosbot -n 1000.h (39.1 KB)
. I guess the logs look fine? Note that I am able to control the robot using gamepad from the instructions here. It’s only the teleop keyboard that is not working.
You could check if you can control the robot via the rosbot.teleop service. If the service is running and you can’t send messages only from the teleop node in the terminal, I would bet.
If you are using the jazzy version, it is necessary to send a message with a timestamp. So the command looks like this: ros2 run teleop_twist_keyboard teleop_twist_keyboard --ros-args -r __ns:=/ -p stamped:=true
The installed ROS version is not compatible with the installed snap.
Many thanks for this. I have the default Jazzy version installed in the SBC and so I tried setting timestamp to true in the teleop command like you said and it’s now working!