We are currently working with a Panther to which we have connected a user computer (an Up Board).
The communication between the two computer is ok: we can send and receive commands from the Up Board.
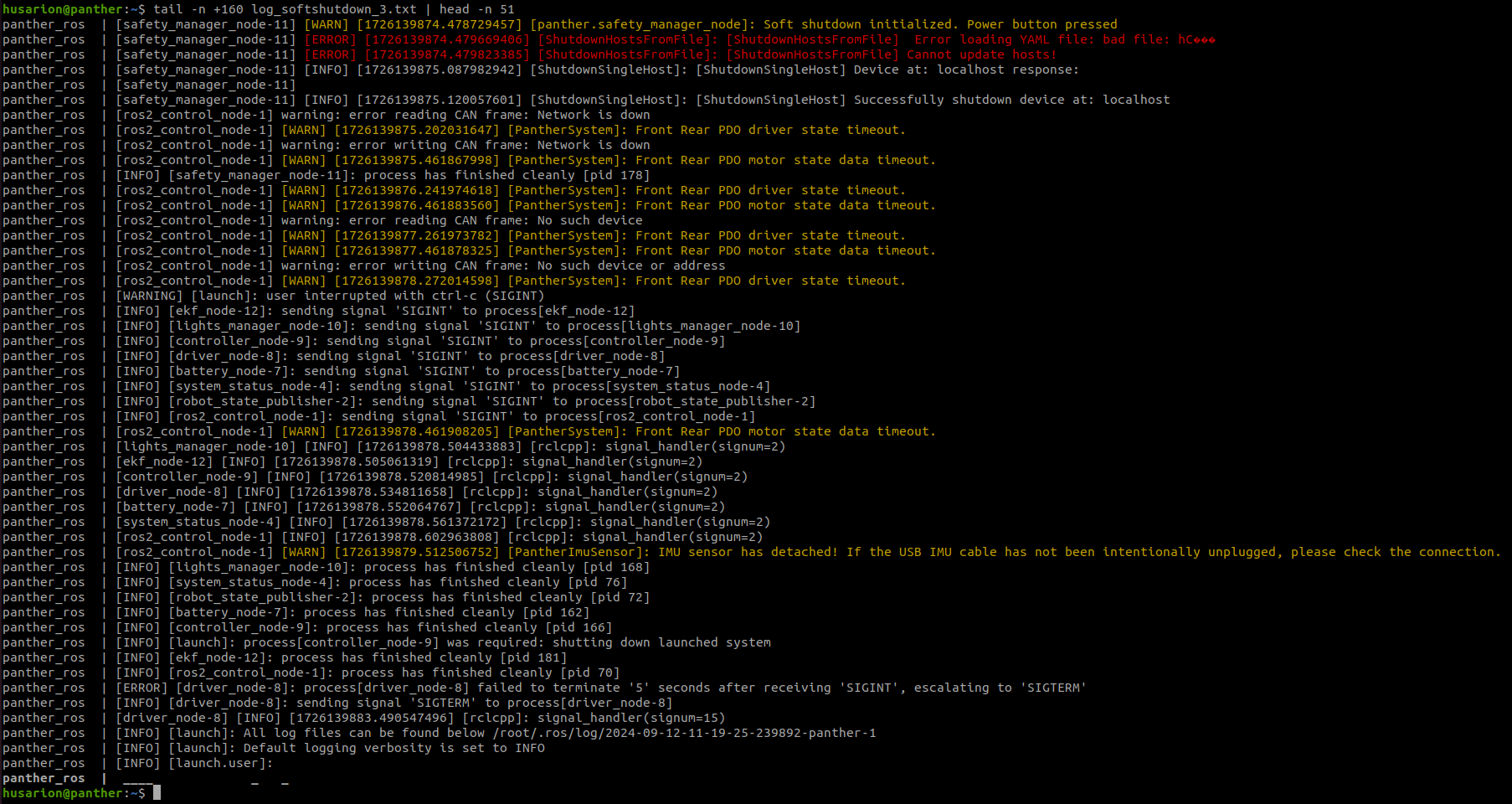
We now want to implement the soft shutdown function but we are encountering an issue. I followed the instructions in the manual for a custom configuration (User Computers | Husarion) but the Up Board seems to don’t receive soft shutdown signal.
Could you help me?
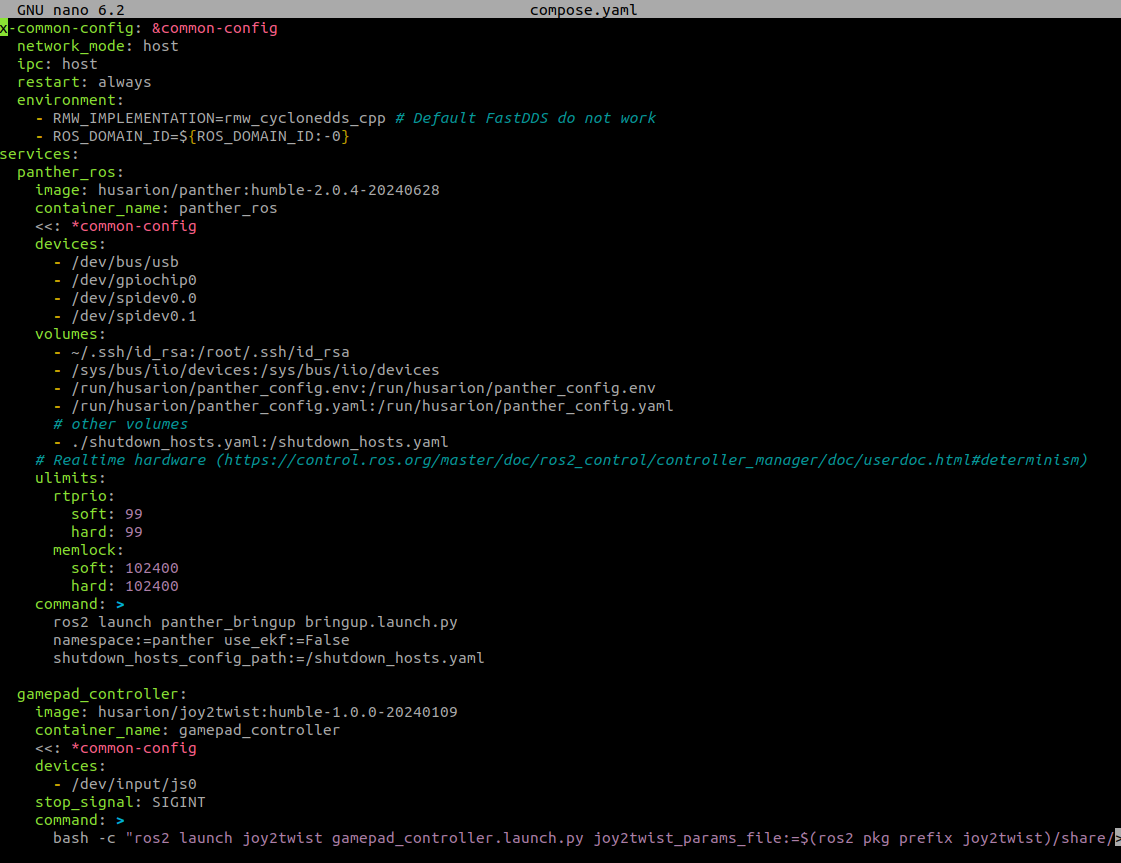
Here is the configuration:
ROS 2 Humble (docker in the RPi, conda environment in the Up Board)
We can recreate the bug and it will be resolved in the next release.
I have pushed the hotfix to our docker hub and it should be available with husarion/panther:humble-ros2-devel tag for you.
Please replace husarion/panther:humble-2.0.4-20240628 with husarion/panther:humble-ros2-devel in compse.yaml file. I also inform that this hotfix was provided on version husarion/panther:humble-2.1.0-20240723. For more informations look at the changelogs in our packages on panther_ros.